24GHz车载防撞雷达及中频信号处理电路设计*
2014-11-10 07:09:36姜兴,刘涛
网络安全与数据管理 2014年1期
姜 兴,刘 涛
(桂林电子科技大学 信息与通信学院,广西 桂林 541004)
近年来,随着我国高速公路网建设的快速发展,恶性的交通事故有着愈演愈烈的趋势,为减轻事故发生时对人所造成的伤害,已采用行驶安全带、安全气囊等保护措施,但这些技术均为被动防护,不能从根本上解决碰撞问题。“主动汽车毫米波防碰撞雷达系统”成为近年来国际上研究与开发的热点,主动汽车防碰撞是以雷达测距、测速为基础的实时监测系统。防撞雷达系统实时监测车辆的前方,当有危险目标(如行驶前方停止或慢行的车辆)出现,雷达系统提前向司机发出报警,使司机及时作出反应,同时,雷达向汽车控制系统输出信号,系统根据情况进行自动刹车或减速。由于毫米波具有带宽大、分辨率高、天线部件尺寸小及能适应恶劣环境的优点,毫米波雷达系统具有重量轻、体积小和全天候等特点,并已有产品开始投入市场,前景十分好。为提高我国车辆的道路行车安全,满足汽车电子设备对无线电频谱资源的需求,推动无线电新技术的应用,根据我国无线电频率划分规定及频谱资源使用情况,工业和信息化部2012年11月19日正式发布了《工业和信息化部关于发布24 GHz频段短距离车载雷达设备使用频率的通知》[1]。为了充分利用汽车带来方便的同时,尽可能地避免车祸的发生,在我国研究和推广汽车防撞装置显得日益重要和迫切。本文基于德国Innosent公司推出的K-波段VCO雷达收发器IVS-179,设计并实现了该雷达及雷达后端中频信号处理电路。
1 FMCW雷达测距、测速原理
调频连续波(FMCW)雷达系统通过天线向前方发射一列连续调频毫米波,并接收目标的反射信号。发射波的频率随时间按调制电压的规律变化。一般使用三角波信号作为调制信号。天线接收到的反射波与发射波的形状相同,只是在时间上有一个延迟,发射信号与反射信号在某一时刻的频率差即为混频输出的中频信号频率,且目标距离与前端输出的中频频率成正比。如果反射信号来自一个相对运动的目标,则反射信号中包括一个由目标的相对运动所引起的多普勒频移。根据多普勒原理就可以计算出目标距离和目标相对运动速度。
2 系统结构介绍
该雷达系统结构框图如图1所示。工作时由K-波段VCO雷达收发器VCO发出经三角调制、频率随时间变化的调频连续波,一部分经90°功分器分为同相/正交两路进入混频器,一部分经微带阵列发射天线向外辐射。目标回波信号被微带阵列接收天线接收,经射频前置放大器放大后进入混频器,与同相/正交两路发射波混频,经过低通滤波,产生幅度相同、相位相差90°的两路中频差频信号,得到带有目标信息的输出信号I和Q。I为同相信号,Q为正交信号。I、Q两路信号中均携带有探测目标的距离、速度和方向的信息。

图1 系统结构框图
在本设计中从K-波段 VCO雷达收发器输出的I、Q信号具有相同的后续处理电路,即先通过高通滤波器滤除调制的三角波信号,再通过运算放大器放大信号到合适的幅度,输送到后端信号处理模块上[2-3]。
3 滤波电路设计
由于远距离目标的回波信号幅度很小,以小轿车为例,当距离大于 100 m时,经雷达收发器RF-前置放大后的输出信号幅度约为 10 mV~20 mV,因此,该输出信号在输入信号处理模块进行采样前必须再次经过放大以提高幅度。但由于输出信号被三角波调制,必须首先通过滤波器将该信号进行解调,再进行放大。由于多反馈有源滤波器具有低成本、易实现、Q值高及增益高等特点,有源滤波器相比简单的LC滤波器具有更小的体积和更小的衰减,在本设计中采用多反馈有源高通滤波器。多反馈滤波器[4]原理图如图2所示。二阶高通滤波器的一般性的传递函数可以写为:

其中,A0为通带增益。为了简化电路的计算,并减小电容C1、C2、C3间的容差以尽可能降低滤波器在通频带内增益的变化,取C1、C2和C3有相同的电容量(C1=C2=C3=C)。图2所示电路的传递函数为:


图2 多反馈高通滤波器原理图
将式(2)与式(1)进行比较计算,得到单位增益的Butterworth滤波器近似计算公式:
其中,f0为设计 Butterworth滤波器的截止频率,R、C为根据设计所选择的电阻阻值和电容容值。为了使得电路供电结构简单,在本设计中采用单电源供电[5],设计的截止频率为1 kHz。单位增益的Butterworth滤波器如图3所示。采用ADS2009软件进行时域交流仿真结果如图4所示。

图3 单位增益的Butterworth滤波器
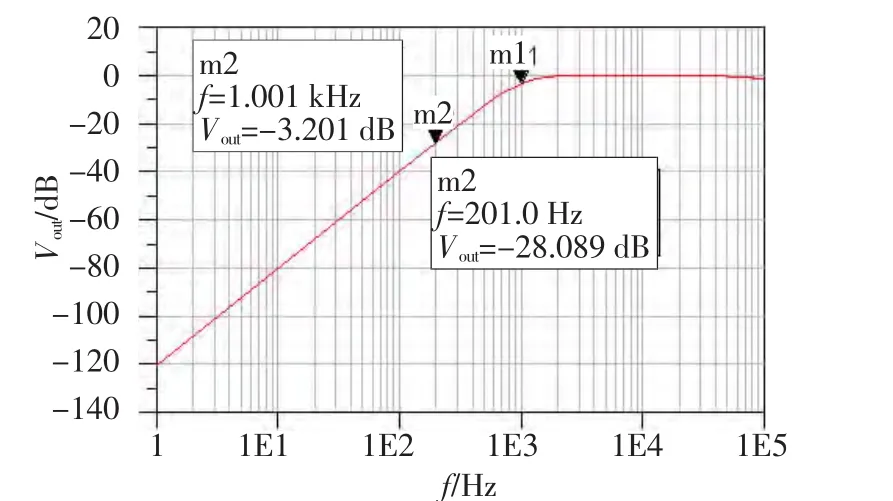
图4 该滤波器频率响应
由图4可以看出,在截止频率为1 kHz时衰减为3.2 dB,在 100 Hz时衰减为 40 dB,200 Hz时衰减为 28 dB。这表明该滤波器能很好地满足设计所需要求。
4 AGC放大电路设计
由于输出信号幅度很小并且随距离的不同其幅度和频率也不同,将其送入后端信号处理ADC模块前需要将其幅度进行适当的放大以满足后端处理的要求。而用于信号处理的FPGA模块输入端口有限幅功能,经测试其最大输入电压幅度为2.5 V。将10 mV电压放大至2.5 V增益约为+48 dB,当距离为15 m左右时,经雷达收发器RF-前置放大后的输出信号幅度约为500 mV~600 mV。若通过固定增益放大器对信号进行放大以满足远距离需要,则距离较近时的信号会被限幅,从而会产生谐波分量,将对计算结果造成干扰,影响系统测量的精度和准确度。由于自动增益控制(AGC)可以随输入信号的幅度大小来改变其增益大小,从而可以使得输出信号幅度稳定在某一电平值,因此,在本设计中引入AGC放大电路。由于AGC对不同频率的输入信号的增益不完全相同,因此会造成增益谱不平坦,即有增益起伏。本设计选用的AD603[3]是美国ADI公司推出的一款宽频带、低噪声、低畸变、高增益精度的压控 VGA芯片,其内部含有负反馈,可以较好地控制增益起伏。所设计单电源供电AGC放大电路原理图如下图5所示。由参考文献[6]可知,AD603的 1管脚(GPOS)和 2管脚(GNEG)间的电压控制着其增益,单片AD603的增益最大可达+40 dB。为了使增益达到+60 dB,本设计中采用两片小信号放大器AD603顺序级联模式,有利于控制精度和信噪比的提高,在工作时当第一级的增益用尽后才启用第二级的增益。设计采用将VOUT与FDBK短路即为宽频带模式(90 MHz宽频带),此时增益计算公式为 40 Vg+10,可知当 V12(单片 AD603 1、2 管脚间电压)在-500 mV~500 mV之间时,AD603的增益设置为-10 dB~+30 dB,即两片级联AD603的2管脚(GNEG)之间有1 V的压降。参考文献[7]采用单片机或者FPGA产生该控制电压使得系统变得复杂,系统成本增加,在这里通过选取适当的分压电阻 R4、R5、R6,使得 1、2级间控制脚 GNEG 间的电压差为1 V,该电路结构简单,成本低廉。由增益计算公式可得两片AD603级联其增益最大可达到+60 dB,满足设计要求。由Q2和R10组成一个检波器,用于检测输出信号的幅度变化;Q1形成一个电流源,提供基准电流。流进电容C13的电流为两个三极管Q1、Q2的集电极电流之差,该电流大小随U2输出信号的幅度大小的变化而变化,并在C13上产生电压,形成自动增益控制电压VAGC,使得加在放大器 U1、U2的 1管脚(GPOS)的自动增益控制电压VAGC随输出信号的幅度变化而变化,从而使得增益控制输入端电压变化达到自动调整放大器增益的目的。
5 测试结果
在通过软件仿真验证了系统的可行后,制作了电路的相应实物,并将各部分级联通过调试构成了该雷达防撞及中频信号处理电路系统。通过实际测试,当在实验室目标静止距离该雷达系统15 m时,使用该雷达系统所接收到的经雷达收发器RF-前置放大后的被三角波调制的输出信号波形如图6所示,通过后端信号处理电路经过滤波及AGC放大后的信号波形如图7所示。由图6及图7对比可见,该系统很好地滤除了不需要的、对后端信号处理造成干扰的调制三角波信号,抑制了杂散信号,并放大含有目标距离信息的有用中频信号到峰峰值2.5 V,为后端信号处理模块提供了稳定的输入信号,达到了设计所需的要求,且运行状态稳定。在公路上对行驶目标小汽车进行测试时,测量最远距离能达到110 m,110 m时的时域波形如图8所示。虽然从图中可见杂波干扰比较严重,但该信号满足信号处理的要求,通过信号处理模块进行相应处理后,在显示终端上显示的目标距离和速度如图9所示。从图中可得,距离为113.6 m,速度为3.9 m/s,在误差范围内结果是准确的。该系统能用于汽车的前向防撞,能有效地提高行车的安全性。
本文设计并实现了一种用于汽车防撞的车载雷达及其中频信号处理电路。选用K-波段VCO雷达收发器体积小,安装方便,性能优良;采用0 dB有源多反馈高通滤波器具有体积小,对通带信号衰减小等优点,有利于准确地提取出带有目标信息的有用信号;引入自动增益控制电路提高输出电压的稳定性,进一步提高信噪比,为下一步信号处理模块提供高质量的输入信号,使计算结果更准确;有效地提高了系统整体性能。对所设计的雷达系统实物进行了测试,结果表明,对目标小汽车的探测距离能够达到110 m以上,取得了良好的效果。

图6 雷达接收信号波形
图7 滤波后、AGC放大后的信号波形
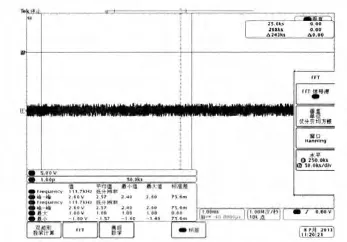
图8 110 m时滤波后、AGC放大后的信号波形

图9 显示终端目标距离和速度
[1]工业和信息化部发布24 GHz频段短距离车载雷达设备使用频率规划[EB/OL].http://www.miit.gov.cn/n11293472/n11293832/n12843926/n13917012/15038134.html,2012-11-29.
[2]岳文豹,杨录,张艳花.FMCW雷达近程测距系统设计[J].电子技术应用,2012,38(4):73-79.
[3]侯丽娟,李建玲.几种 AGC电路在雷达中的应用[J].火控雷达技术,2002,31(9):18-22.
[4]MANCINI R.Op amps for everyone[Z].Texas Instruments Incorporated,2001.
[5]CARTER B.A Single-supply op-amp circuit collection[Z].Texas Instruments Incorporated,2000.
[6]AD603英文产品数据手册 [EB/OL].http://www.analog.com/static/imported-files/data_sheets/AD603.pdf.
[7]陈永刚,刘立国.AD603及其在AGC电路中的应用[J].电子世界,2002(4):39-40.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
电子制作(2018年19期)2018-11-14 02:37:02
宇航计测技术(2018年3期)2018-09-08 02:21:24
信号处理(2018年5期)2018-08-20 06:16:02
信号处理(2018年5期)2018-08-20 06:16:00
信号处理(2018年8期)2018-07-25 12:25:42
信号处理(2018年8期)2018-07-25 12:24:56
制造业自动化(2017年2期)2017-03-20 14:26:17
股市动态分析(2014年27期)2014-07-29 19:40:43