
激光制导动靶照射精度测量系统
2014-11-09 09:09:00姚志军韩秋蕾
液晶与显示 2014年6期
姚志军,韩秋蕾
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
精密制导武器尤其是半主动激光制导武器在现代高技术战争中的地位和作用愈发受到人们的重视,是我国科技国防战略的重点,其中对激光照射光斑的时序特性和空间特性的测量更是重中之重。时序特性包括激光编码精度、脉冲频率、频率精度以及漏闪率等。空间特性主要指激光光斑照射位置与靶板中心的偏差以及照射偏差角等。
激光照射光斑实验通常由机载激光器发射激光,瞄准移动目标靶进行照射。当激光制导武器瞄准车载移动靶时,要求精确测量光斑相对靶板中心位置的偏差以及光斑的时序编码格式[1]。本文设计一套基于相对测量方法的系统来实现激光照射光斑相对靶板中心位置的精度测量。对比其他测量方法,本文方法解决了激光后向散射对测量光斑信号的干扰难题,且能够在复杂背景下稳定跟踪靶板,实现精确测量[2]。系统通过激光光斑探测器来获取光斑到来时刻信息,分析其编码格式;采用可见光传感器和红外传感器分别跟踪靶板和光斑,最终计算其偏差。文章详细分析系统设计难点并提出解决方案,最终通过外场实验证明本文方法可精准、可靠、便捷实现动靶照射精度的测量,满足系统的精确性和鲁棒性要求。
2 系统组成及其工作原理
2.1 系统组成
系统主要由激光光斑探测器、可见光传感器、红外传感器、跟踪转台、时码钟、时序控制模块等组成,如图1所示,所有设备固定在载车方舱内部,观测设备与移动靶间距离1300m,实现对直径约1.5m的光斑的稳定跟踪和照射精度测量。
激光光斑探测器、可见光传感器与短波红外相机放置在跟踪转台上,调整光轴重合,协同完成测量任务。
其中,激光光斑探测器负责检测激光光斑信号,可见光传感器采集移动靶板图像,红外传感器采集激光光斑图像。跟踪控制计算机负责计算靶板中心位置并实现靶板的自动跟踪。光斑测量计算机完成光斑位置计算及光斑照射精度测量。时码钟提供的精准时间信息用于照射光斑的时序特性测量。时序控制模块控制摄像机与光斑着靶时刻同步曝光。
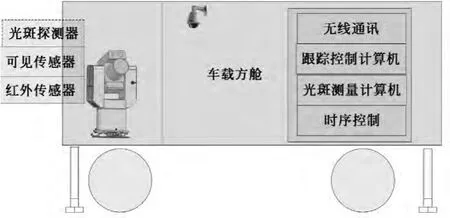
图1 激光光斑测量系统Fig.1 Measurement system for laser spot
2.2 系统工作原理
激光光斑探测器探测到激光信号后,通知时码钟锁存当前时间信息,时码钟将锁存的时间传送给光斑测量计算机。同时激光光斑探测器提供对应光斑脉冲时刻的时序信号,将此信号送到时序控制模块,时序控制模块产生相应的控制信号(摄像机触发信号、采集卡外触发信号等),使整个系统按要求的时序工作。
跟踪控制计算机根据时序控制模块的控制信号,采用外触发方式采集可见光传感器图像,实时计算目标靶在视场中的位置,并将其位置与光轴的偏差传送到转台的随动系统中,随动系统根据偏差信号实时调整转台位置,并稳定跟踪目标靶。
光斑测量分系统在外触发信号的控制下实时采集红外传感器图像,提取光斑信号,计算光斑位置,绘制光斑能量图。同时同步采集靶板跟踪摄像机的图像,保证每帧激光光斑图像均有与其相对应的同一时刻的靶板图像,以备后续计算靶板中心位置时使用。
3 照射精度测量系统关键算法
在激光光斑照射精度测量过程中,需要重点解决的关键技术包括激光后向散射抑制、精准时序控制和复杂背景低对比度动靶稳定跟踪等。
3.1 光斑探测及后向散射抑制
激光光斑以不同形式的编码进行照射,光斑探测器的主要功能是实时检测光斑到来时刻信息,完成编码格式的验证。激光在传输过程中,受到大气溶胶的影响发生散射,会产生多个不同波形的回波信号,给激光照射光斑的时序特性测量带来了极大的干扰[3],如图2所示。

图2 激光回波波形图Fig.2 Wave form of return laser signal
激光器发射的激光呈高斯分布,从图2中可明显观测到光斑探测器接收到的回波信号包括两种类型,其中最尖锐的最大幅值波峰为目标反射回的激光,其他一系列低矮、平缓的分量是激光传输路径中大气溶胶等反射回的信号,且目标反射回波出现在干扰波之后[4-6]。本文利用这一特性来区别目标回波与干扰回波。具体步骤为:
(1)对探测器接收到的波形进行平滑滤波,消除微小的毛刺信号;
(2)统计不同半宽、不同幅值的分量,将其分割为多个样本;
(3)根据幅值-半宽比及分布信息确定目标反射分量,作为最终结果输出。
本系统采用带前置放大电路四象限探测器作为激光光斑探测器,根据其光谱曲线,该探测器适合作为1064ns波长的激光探测,具有快速响应、灵敏度比较高、噪声小等特点,其本身具有将四个象限累加后输出能力,可进一步提高信噪比,满足光斑探测的要求。
激光光斑探测器收到激光脉冲后,进行整形放大,并产生对应光斑时刻的脉冲信号,控制时码钟锁存当前时刻,时码钟将时间信息锁存并通过串口发送到光斑处理计算机及时序控制模块中。原理结构框图如图3所示。
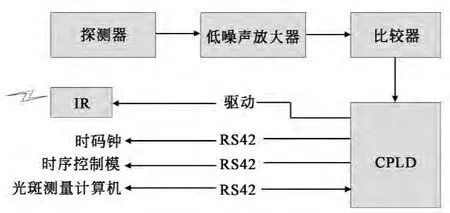
图3 激光光斑探测器结构图Fig.3 Framework of laser spot detector
3.2 精准时序控制
由于激光脉冲的持续时间较短,为提高光斑检测能力和测量精度,提高激光与背景光的对比度,采用较小的积分时间有利于抑制背景的干扰。这样带来的问题就是如何保证传感器曝光与激光脉冲精确同步,即保证采集到的图像中能够观测到激光光斑。本文通过精准时序控制方式来解决此问题。
时序控制模块接收光斑探测器发送来的激光编码信息,根据其频率控制红外传感器按照光斑频率工作,控制可见光传感器按照2倍以上的光斑频率工作(保证可见光传感器工作频率不低于每秒50帧图像),以提高系统的跟踪精度。对应产生与光斑同频的外触发信号送与跟踪控制计算机和光斑测量计算机,供采集卡使用。逻辑结构如图4所示。
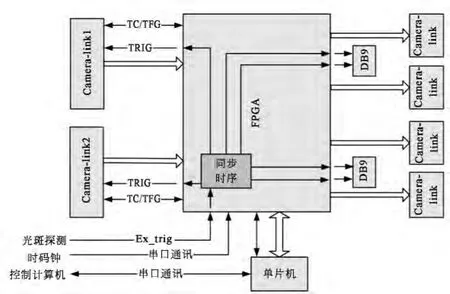
图4 时序控制模块结构图Fig.4 Framework of time sequence
按照所选图像传感器的参数,选择的积分时间为100μs。其周期与光斑周期一致,相位略为超前,以保证激光光斑到来时刻红外传感器正在曝光。采用光斑频率触发方式,可以确保每个激光脉冲均被可靠采集。
由于可见光传感器工作频率高于红外传感器,当采集可见光图像时,为保证采集到的靶板图像与激光光斑图像是同时刻对应画幅,让采集卡工作在外触发状态下,外触发脉冲由时序控制模块产生,可见光采集卡只有当采集卡外触发脉冲到来时采集一帧图像,其余图像不予采集。假定光斑频率为10c,具体工作时序如图5所示。

图5 外触发时序图Fig.5 Figure of exernal triggering
3.3 动靶跟踪
经草原环境实验发现,在光线较强的环境中,由于草地反射剧烈,系统跟踪的靶板目标与草地及天空背景灰度对比度较低。因此采用传统灰度分析方法无法有效提取跟踪目标。同时,通过实验数据发现,实验过程中由于大气湍流现象,引起目标图像边缘在帧间发生剧烈抖动、变形,并且边缘更加模糊[7]。
在实验过程中,注意到草原中存在较多的孤立或联排的树木。背景突变较严重,给靶板跟踪带来较大干扰。外场采集图像如图6所示。
根据上述分析,靶板目标稳定跟踪需要解决以下几项关键技术问题:
(1)草地及天空背景灰度与靶板相似造成的影响;
(2)大气湍流造成跟踪目标边缘模糊、变形问题;
(3)草原中树木对跟踪带来的干扰问题。
为了解决上述几项技术问题,系统通过改进采用了以下技术方法。

图6 外场靶板图像Fig.6 Out-field target plate image
3.3.1 目标边缘提取与增强
由于靶板与背景的灰度基本一致,因此无法采用灰度特征的跟踪方式对目标进行跟踪处理。图像的边缘反映了靶板与背景的阶越变化,包含着场景中有价值的边界信息,是图像分析的重要依据。从实验采集图像中,我们注意到靶板为四方形,由水平方向与垂直方向线条组合而成。为了能够稳定跟踪靶板目标,我们需要将靶板图形突出并提取出来。因此根据靶板特点,分别采用水平方向边缘提取滤波器、垂直方向边缘提取滤波器。为了满足快速、实时的图像处理它的计算方法必须做到简单实用。这里我们采用以下两种滤波器(如图7所示),它们不仅能有效突出水平方向与垂直方向线条,而且算法能够平滑噪声,对噪声具有抑制能力。
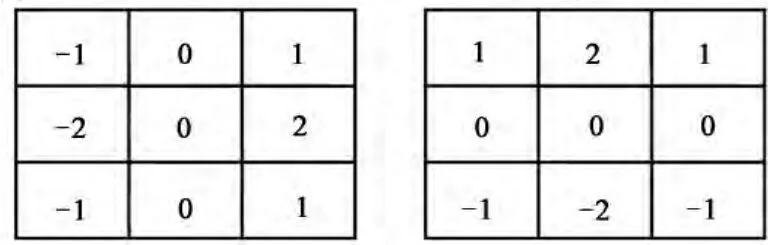
图7 方向滤波器Fig.7 Directional filter

图8 方向滤波器处理效果图Fig.8 Result image of directional filter
通过该方向滤波器有效突出了目标,抑制了背景图像。根据方向滤波器处理后的图像,可以清晰的分辨出靶板的轮廓及特征矩形。处理结果如图8所示。
3.3.2 目标特征点及直线边缘检测
角点特征具有信息量丰富、便于测量和表示等特点,同时它具有适应环境光照变化等优点。文章采用Harris算法来检测角点。它用微分算子定义了像素强度变化的公式:

由于转台转动以及靶车行驶,图像内容变化分为全局运动和局部运动。特征点匹配过程中会出现多个被遮挡或误匹配的特征点。
在匹配过程中,正确匹配的特征点所运动的距离大致相等,而错误匹配的特征点的运动距离则参差不齐,基于这些考虑,可以采取以下步骤来消除外点:
(1)计算所有特征点的运动距离;
(2)剔除野值,减少错误匹配点的干扰;
(3)分析特征点对的分布,取其高斯分布中心作为运动距离参考值;
(4)重复第2步和第3步,迭代计算运动距离值,当相邻两次结果近似相等时,迭代结束。
经过以上步骤,可初步检测出相邻帧图像中靶板运动偏移量[8-10]。
由于受到大气湍流及边缘模糊等情况影响,检测出的靶板边缘会发生部分的扭曲变形,本文采用霍夫变换检直线段算法来获得真实的靶板边缘信息,从而保证靶板形心计算的精度。
最后通过加权方式代入特征点和直线段边缘信息,实现移动靶板的检测。
3.3.3 靶板运动预测
由于草原中树木的干扰,影响靶板稳定跟踪。为了抑制树木产生的影响,消除跟踪中脱靶量在受到外界环境影响时产生的偏差及错判,系统中采用了靶板轨迹运动预测技术。
轨迹预测是指根据前几帧目标位置、速度和方向等信息,预测出下一帧目标应该出现的位置,从而根据预测的值来判断波门内的目标脱靶量。如图9所示。

图9 轨迹预测示意图Fig.9 Trajectory prediction
目前关于数据拟合的方法有很多,其中工程中应用最为成熟普遍的是最小二乘法。本系统采用视场扩张原理对目标的真实空间位置进行拟合。为了得到目标相对CCD靶面的位置,可以将连续的N帧图像序列拼接成一幅视场无限大的图像,这样,将目标在不同帧图像中的位置用平滑曲线连接起来就可得到目标相对CCD靶面的轨迹。根据目标的轨迹,可以预测出下一时刻目标的位置。如图10所示。
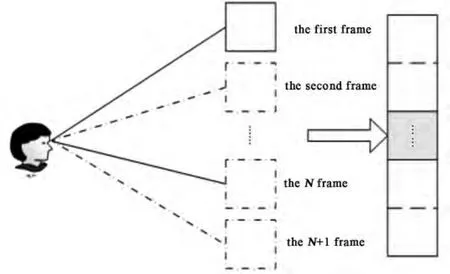
图10 视场扩张原理轨迹外推Fig.10 Abridged general view of the method field of view enlargement
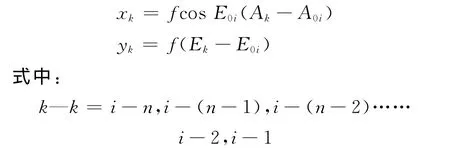
下列公式将脱靶量和编码器值合成为目标真实的空间位置:

式中:
f——焦距,mm;
A0——编码器方位,rad;
E0——俯仰值,rad;
x——图像传感器靶面像元尺寸,mm;
y——图像传感器靶面像元尺寸,mm。
假设采用N点外推,外推的具体步骤如下:
对于时刻i,已知编码器角度A0i,E0i,靶量x,y,首先根据公式合成目标的真正角度Ai,Ei。
对于时刻i前n帧,因为已知目标的真正角度Ak,Ek,根据公式反推出其相对于(A0i,E0i)的脱靶量xk,yk。
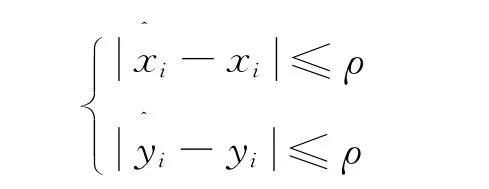
根据N点二次多项式(平方)预测算法推出时刻i脱靶量预测值xi,yi。
判定阈值ρ事先设定,单位为mm。
若满足公式则目标匹配;否则目标不匹配。
此方法能够有效的提高系统的鲁棒性,使目标丢失后的一段时间内,转台仍能够按照正确的轨迹进行运动,保证系统正确跟踪鲁棒性。
4 测量实验与结果
4.1 激光光斑后向散射抑制实验
采用1064nm激光器进行实验,激光器对准1.1km处的烟囱,由于实验期间大气中粉尘含量较高,可明显观测到存在后向散射。由于激光器的发射周期存在400ns的抖动,故所设定的传感器提前曝光时间要大于该抖动误差。通过对光斑探测器接收信号波形的分析,判定目标反射激光分量,以此作为异步选通条件,使传感器提前激光回波时刻1μs开始曝光。从图11中可知该方法能够有效抑制激光后向散射的干扰。

图11 激光后向散射抑制Fig.11 Result of back-scattering restrained
4.2 精准时序控制
通过对激光光斑照射时刻的测量,获得激光照射编码格式。时序控制模块控制可见光传感器和红外传感器同时曝光,使靶板图像与光斑图像在时间上实现严格的对准,保证最终相对测量的精确度。
图12是实际外场实验的工作截图。激光器工作在10Hz频率下,载车运动速度为30km/h,从图中可知在时序控制模块的触发下,传感器可准确捕捉到激光照射光斑。从图中可看到可见图像与红外图像在统一触发信号下同步曝光,系统同时对两幅图像进行融合处理并绘制能量图。

图12 软件运行图Fig.12 Software running station
4.3 动靶跟踪实验
在外场实验中,靶板载车运动速度为30km/h,运动场景为草原,背景包括树木、草地以及其他人造建筑。系统针对实际情况采取方向边缘滤波、角点与直线段检测以及轨迹预测等方法实现移动靶板的稳定跟踪。如图13所示。

图13 动靶跟踪实验Fig.13 Result of moving target traking
激光光斑角位置测量精度不仅取决于光斑质心位置测量精度,还取决于靶板形心位置精度、光学视场畸变、观测方向与靶板法线的夹角、视轴平行度、调平精度等[11]。视轴平行度经过精密调整,可以达到一个像元,此误差属于系统误差,在实验中已消除,因而忽略不计,调平精度达120″,由于以上几个误差均独立,根据误差模型可以得到:

其中:α为光轴与靶板法线的夹角,根据轨道长度与距离,则:

光学视场畸变可以修正,修正误差可达0.5像元,即0.04mrad。

5 结 论
本文根据实际靶场实验任务对高精度、便捷性及实时性的要求,提出激光光斑动靶照射精度相对测量方案,分析并介绍了测量方案中光斑检测、时序精准控制及低对比度动靶跟踪等关键技术难点,采用异步距离选通方法抑制了后向散射,通过对传感器的精确时序控制同步采集可见与红外图像,最后采用方向滤波算子及直线段检测方法获取靶板形心,利用视场扩张轨迹外推法达到稳定跟踪的目的。最终激光照射光斑的位置测量精度达到0.07mrad。
[1]黄继鹏,王延杰,孙宏海,等.激光光斑位置精确测量系统[J].光学精密工程,2013,21(4):841-848.Huang J P,Wang Y J,Sun H H,et al.Precise position measuring system for laser spots[J].Optics and Precision Engineering,2013,21(4):841-848.(in Chinese)
[2]张少迪,孙宏海.远距离激光光斑位置高精度测量方法[J].中国激光,2012,39(7):0708003.1-0708003.9.Zhang S D,Sun H H.High precision method of long-ranged laser spot[J].Chinese Journal of Laser,2012,39(7):0708003-1-0708003-9.(in Chinese)
[3]Kundur D.Blind deconvolution of still images using recursing inverse filtering[D].Toronto:University of Toronto,1995.
[4]苏可心,韩广良,孙海江.基于SURF的抗视角变换图像匹配算法[J].液晶与显示,2013,28(4):626-632.Su K X,Han G L,Sun H J.Anti-viewpoint image matching algorithm based on SURF [J].Chinese Journal of Liquid Crystals and Displays,2013,28(4):626-632.(in Chinese).
[5]王敬轩,尹传历.基于DSP和FPGA的嵌入式实时图像增强系统[J].液晶与显示,2013,28(3):459-463.Wang J X,Yin C L.Embedded color image enhancement system based on DSP and FPGA [J].Chinese Journal of Liquid Crystals and Displays,2013,28(3):459-463.(in Chinese)
[6]张来刚,魏仲慧,何昕,等.面向底纹理图像的快捷立体匹配[J].液晶与显示,2013,28(3):450-458.Zhang L G,Wei Z H,He X,et al.New stereo matching method based on edge extraction[J].Chinese Journal of Liquid Crystals and Displays,2013,28(3):450-458.(in Chinese)
[7]Rahman Z,Jobson D J,Woodell G A.Retinex processing for automatic image enhancement[J].Journal of Electronic Imaging,2004,13(1):100-110.
[8]Zhai Y U,Liu X M.An improved fog-degraded image enhancement algorithm [J].Wavelet Analysis and Pattern Recognition,2007,12(2):522-529.
[9]Zhang L,Wu X L,Antoni B,et al.Color demosaicking by local directional interpolation and nonlocal adaptive thresholding[J].Journal of Electronic Imaging,2011,20(2):203016(1-16).
[10]李一芒,何昕,魏仲慧,等.采用降维技术的红外目标检测与识别[J].光学精密工程,2013,21(5):1297-1303.Li Y M,He X,Wei Z H,et al..Infrared targets detection and recognition using dimension reduction technology[J].Optics and Precision Engineering,2013,21(5):1297-1303.(in Chinese)
[11]Chan T,Wong C K.Total variation blind deconvolution [J].IEEE Transactions on Processing,1998,7(3):370-376.
猜你喜欢
都市(2023年6期)2023-12-28 07:56:54
诗歌月刊(2023年1期)2023-03-22 14:06:24
中国农业信息(2023年3期)2023-03-18 08:19:04
中国农业信息(2021年3期)2021-11-22 06:44:48
高压物理学报(2020年6期)2020-12-01 10:02:14
阅读(高年级)(2019年9期)2019-11-15 07:22:54
阅读与作文(小学高年级版)(2019年8期)2019-10-16 04:46:50
兵器装备工程学报(2019年7期)2019-08-13 01:22:06
兵器装备工程学报(2019年6期)2019-07-05 00:40:08
电子制作(2016年15期)2017-01-15 13:39:08
