
飞翼布局阻力类偏航操纵装置操纵特性分析
2014-11-05 07:36李忠剑马东立
北京航空航天大学学报 2014年5期
李忠剑 马东立
(北京航空航天大学 航空科学与工程学院,北京100191)
飞翼布局机身与机翼融为一体,整个外形都是升力面,构型简洁流畅,气动效率高,隐身特性好,常作为远程长航时无人机、轰炸机、无人作战飞机等的理想布局型式,美国的B-2隐形轰炸机、X-47B无人作战飞机、RQ-170等都采用了这种布局.但是飞翼布局取消了常规的平尾和垂尾,相比于正常式布局,稳定特性较差,操纵舵面配置困难,在飞行过程中气动力和力矩耦合严重,无法像常规布局飞机一样实现纵向和横航向操纵的解耦.因此飞翼布局设计的一个较大的挑战是寻找合适的新型操纵机构和设计先进的控制系统,以保证良好的操纵性和飞行品质[1].
早在20世纪90年代,美国针对无尾飞翼作战飞机开展了创新操纵机构(ICE,Innovative Control Effector)计划.该计划第1阶段提出了多种操纵机构,其中常规操纵面包括俯仰襟翼、升降副翼、前缘襟翼等,创新型操纵面包括全动翼尖、嵌入面、开裂式方向舵等阻力类偏航操纵装置.该计划第2阶段主要针对创新型操纵面进行了实验测试和计算分析,并指出阻力类偏航操纵装置具有比较满意的操纵性能[1-3].美国 NASA 兰利研究中心也曾开展针对飞翼构型的低速风洞实验,得到一些操稳特性方面的结论.英国针对飞翼式无人作战飞机构型进行的一些风洞实验研究,重点关注飞翼构型的纵向力和力矩特性.国内针对飞翼布局操纵舵面的研究起步较晚,但近些年来,随着飞翼概念越来越受重视,此方面的研究逐渐增多.围绕阻力类偏航操纵装置的研究主要包括舵面设计、风洞实验、控制系统应用等.文献[4]分析了阻力方向舵的气动和操稳特性,并设计了相应的控制方案;文献[5]从开裂式方向舵的作用特性、任务匹配和飞行控制分配方面展开系统研究;文献[6]通过风洞实验,重点开展了开裂式方向舵对飞翼布局飞机气动特性的影响研究;文献[7]对嵌入面、全动翼尖的操纵特性进行了定量的分析.
本文综合了开裂式方向舵和上表面嵌入面(下称:嵌入面)两种阻力类偏航操纵装置,利用数值仿真技术,对比相关文献的风洞实验结果,详细分析了这两种舵面的偏航操纵特性、三轴操纵耦合特性,以及对气动特性和稳定特性的影响规律,比较了这两种舵面在操纵特性方面的共同点和差异性.本文的结论可为解决飞翼布局偏航操纵问题和阻力类偏航操纵装置的工程化应用提供一定的基础.
1 阻力类偏航操纵装置特点
大展弦比飞翼布局阻力类偏航操纵装置通常包括开裂式方向舵、嵌入面、全动翼尖等,开裂式方向舵由两片可上下等角度偏转作动的舵面组成;本文研究的嵌入面由机翼上表面的一个常规扰流片组成,可绕其带后掠的铰链线偏转;全动翼尖则通常采用斜置转轴布置在翼尖处.阻力类偏航操纵装置通常配置在飞机外翼段,利用偏转产生的离轴阻力和较长的力臂提供偏航力矩,实现航向控制的目的.
以开裂式方向舵为例,该类操纵装置具有复合功能,左右两组舵面可以单独偏转作为偏航操纵装置,也可以同时对称张开作为阻力板,舵面张开的最大设计角度可达90°.通过一侧上下两片舵面的偏转张开,使流经机翼表面的气流折转方向,并在舵面之后发生分离.作用在开裂式方向舵上的气动力可以分解为阻力和侧力两部分,气动力作用点通常位于重心之后,因此侧力和阻力产生同一方向的偏航力矩.如图1所示(图中也标出了本研究采用的坐标系统),当右侧开裂式方向舵打开时,作用于其上的气动力F通过力臂d产生向右的偏航力矩N,其中F可以进一步分解为阻力D和侧力C:

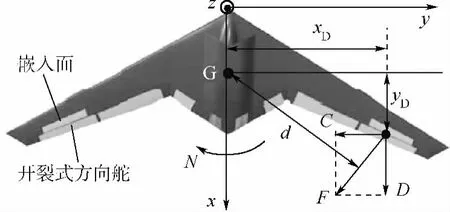
图1 开裂式方向舵受力示意图
常规方向舵属于侧力类舵面,其操纵效能在超声速条件下会大大降低,并且随着迎角的增大而下降,甚至在大迎角条件下完全失效.区别于常规方向舵,阻力类偏航操纵装置利用离轴阻力获得偏航力矩,阻力效应随着迎角和马赫数的增大而增强,在大迎角条件下不会出现失效的现象,在超声速条件下会产生较大的激波阻力,仍能保持较高的操纵效率.
2 仿真模型
开裂式方向舵布置在机翼后缘,分上下两片,可等角度上下偏转,偏转之后机翼后缘产生一个缺口;嵌入面布置在机翼上表面的中后缘,如图1所示,零舵偏时,两种舵面均贴合成为完整机翼.为简化仿真建模过程,这里暂不考虑舵面的具体结构型式,而将舵面简化为无厚度的曲面.
流过舵面之后的气流发生分离,流态紊乱,并脱出较强的涡,准确模拟舵面附近区域气流分离的形态、构建精密的流场网格是本研究的关键.舵面网格的建立通常可以采用非结构化网格、结构化网格等.为保证结果的可信度,在本研究中,网格模型的建立采用结构化网格方法.该方法虽然建模难度较大,但是可以构造更精密的网格,不仅生成速度快、质量容易控制,而且在模拟分离流场方面具备很强的优势,如图2所示为开裂式方向舵的近壁面网格模型.
数值求解方法对于研究结果的精确性也非常重要,选取的湍流模型应适用于求解大分离流场.本研究中采用Menter k-ω SST(Shear Stress Transport)湍流模型,它是在基本k-ω湍流模型的基础上,考虑壁面计算奇性问题,以及在边界层外对逆压梯度比较敏感的特点提出的,能够更精确和稳健地模拟较大分离的流动[8].

图2 开裂式方向舵网格模型
图3所示为采用该套网格计算得到不同舵偏角下的偏航力矩增量随迎角的变化关系,并与文献[5]的结果相对比,两者采用的模型虽然不完全相同,但是均为大展弦比小后掠角飞翼布局.图3可见,计算值与文献值在具体数值上略有差异,但所体现的变化规律是一致的.
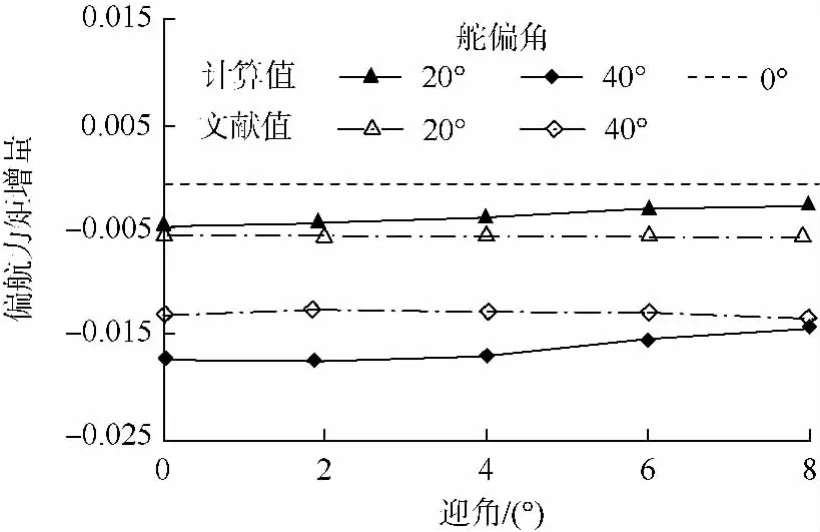
图3 开裂式方向舵结构网格计算结果对比(Ma=0.6)
3 阻力类偏航操纵装置操纵特性
3.1 偏航操纵特性
在典型的低速(Ma=0.2)和高速(Ma=0.6)两种飞行状态下,当飞行迎角为0°时,阻力类偏航操纵装置所产生的偏航力矩增量以及偏航操纵效率随舵偏角的变化关系分别如图4、图5所示.这里的“增量”表示不同舵偏角下的某气动量与零舵偏角时相应气动量的差值.
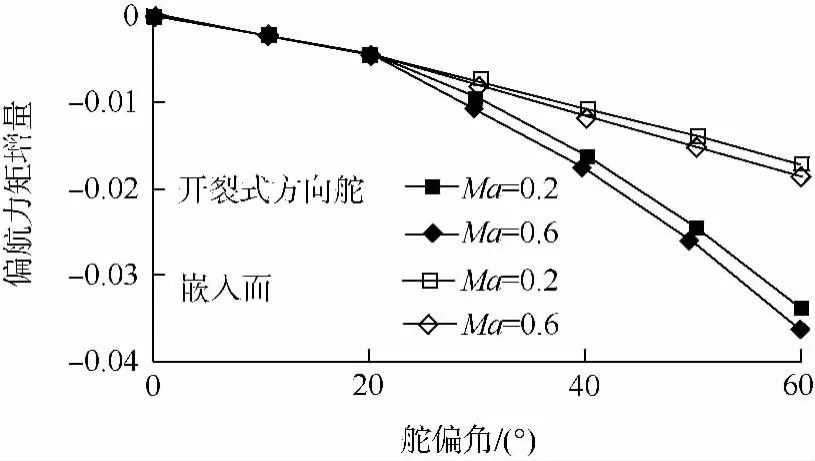
图4 偏航力矩增量随舵偏角的变化
阻力类偏航操纵装置的偏航力矩增量主要由偏转所产生的阻力增量和附加侧力增量对竖轴的力矩叠加而得到.从图5、图6中可以看出,开裂式方向舵和嵌入面两种舵面的偏航力矩增量、偏航操纵效率随舵偏角的增大而增大,均呈非线性关系.小舵偏角下,偏航操纵效率较低,且两种舵面相差不大,由计算结果可知,在8°迎角以内,开裂式方向舵和嵌入面的舵偏角即使达到10°,偏航操纵效率的量值也小于0.015.大舵偏角下,开裂式方向舵的偏航操纵效率得到较大提高,而嵌入面提高较小.因此在相同舵偏角下,开裂式方向舵的偏航操纵效率比嵌入面更高,当舵偏角为60°时,开裂式方向舵的操纵效率达到0.05,与常规方向舵操纵效率的量级[5]相当,但是嵌入面的操纵效率只有0.02,明显小于开裂式方向舵.
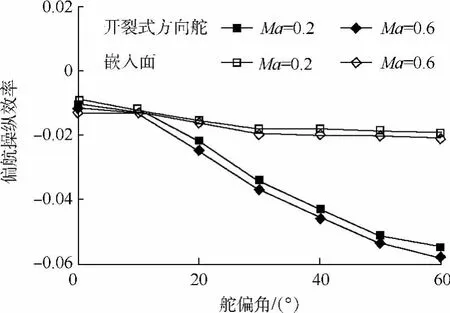
图5 偏航操纵效率随舵偏角的变化
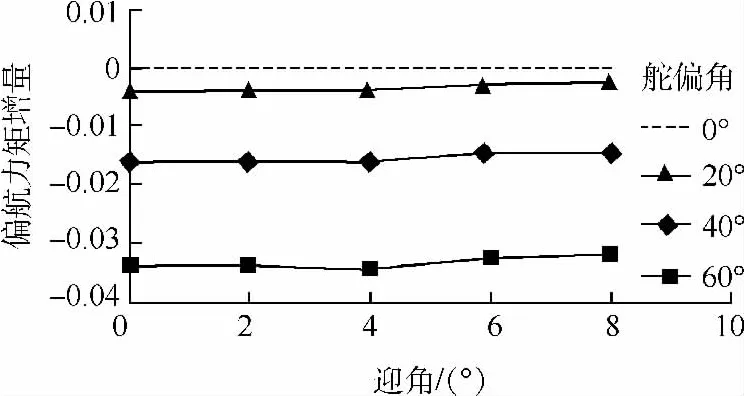
图6 开裂式方向舵偏航力矩增量随迎角的变化
从图5、图6中还可以看出,阻力类偏航操纵装置的偏航操纵效率与马赫数存在一定关系,马赫数越大,偏航力矩增量的量值越大,即操纵效率越高,这与文献[6]的风洞实验结论是一致的.
阻力类偏航操纵装置通过引起局部气流分离造成的离轴阻力来产生偏航力矩,因此在中小迎角下,气流分离的程度主要决定于舵偏角的大小,而与迎角的关系较弱,也就是说,中小迎角下的阻力增量和偏航力矩增量基本不随迎角的变化而变化.同时,舵面之后的流动分离区大部分位于尾迹区,也使得阻力的变化相对比较平缓.如图6所示为在低速情况下,开裂式方向舵偏航力矩增量随迎角的变化关系,基本呈一条水平直线.
由于大展弦比飞翼布局飞机阻力类偏航操纵装置离机身对称面较远,力臂较长,大偏角下产生的偏航舵效是充足的,可满足一定的偏航机动要求,尤其是开裂式方向舵,大偏角时的操纵效率接近常规方向舵的水平,因此是一类效率较高的航向操纵舵面.
3.2 三轴操纵耦合特性
与常规方向舵不同,阻力类偏航操纵装置的偏转会产生严重的三轴操纵耦合,具有显著的附加力和附加力矩效应,从而加大了控制系统设计的难度.
1)附加升力效应.
以低速情况为例,偏转阻力类偏航操纵装置产生的附加升力增量随迎角的变化如图7所示.
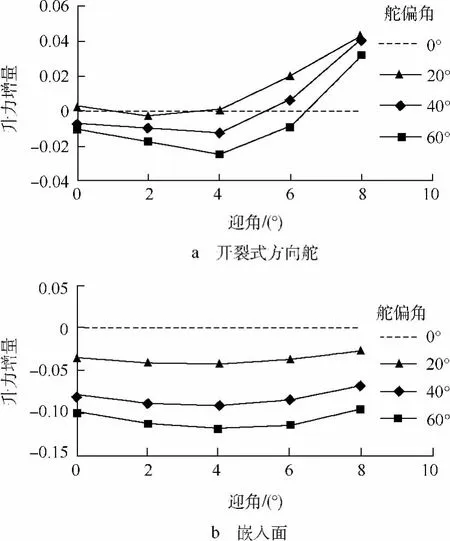
图7 升力增量随迎角的变化
对于开裂式方向舵,当迎角α≤4°时,各舵偏角下的升力增量为负,即升力有所损失,且舵偏越大,升力的损失越大;迎角α>6°时,各舵偏角的升力增量为正,即相比零舵偏时升力有所增加.
文献[6]的风洞实验也显示,在某些情况下,偏转开裂式方向舵可能使升力增加,这种现象的发生,可能与其偏转后引起的气动构型改变有关.由于开裂式阻力方向舵偏转时上翼面向上偏转,减小了翼型的当地弯度,造成升力的降低;下翼面向下偏转,增大了翼型当地弯度,使升力增加,两者综合的效果可能使升力增加.
对于嵌入面,迎角α≤8°时,各舵偏角下的升力相比零舵偏时均有所损失,舵偏角越大损失越严重,在舵偏角为60°时,升力损失接近20%.根据前述的分析,由于该嵌入面安装在上翼面,偏转时减小了翼型的当地弯度,加上大范围的气流分离,升力的降低因此较为明显.
从图7中还可以看出,相同舵偏角下,嵌入面偏转造成的升力损失大于开裂式方向舵,这与两者的模型特征不同有关,与在机翼上的相对位置不同也有一定关系.嵌入面一般配置在开裂式方向舵之前,对机翼表面气流的扰动区域更大.
2)附加侧力效应.
以低速情况为例,阻力类偏航操纵装置偏转产生的附加侧力增量随迎角的变化如图8所示.
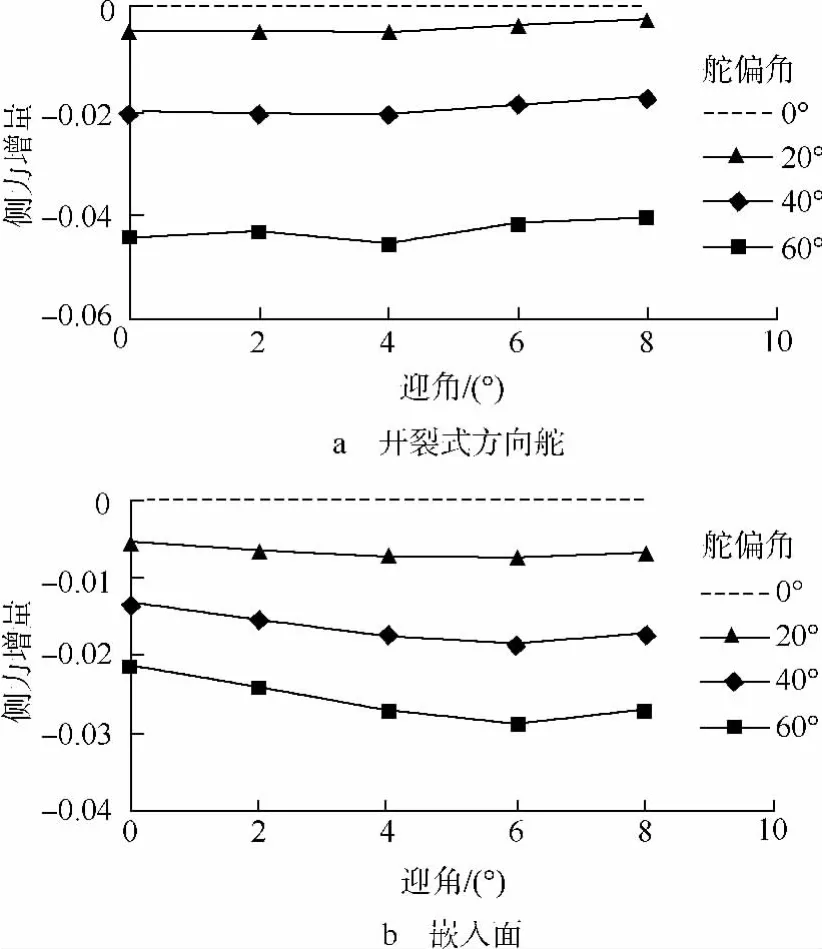
图8 侧力增量随迎角的变化
阻力类偏航操纵装置安装在带后掠的飞翼布局飞机上,零舵偏时,由于飞机两侧对称,侧力很小,近似为零.当右侧舵面偏转一定角度后,产生了向左的侧力,舵偏角越大,侧力增量的量值越大,即向左的侧力越大.
迎角α≤8°时,开裂式方向舵和嵌入面的侧力增量与迎角的关系较小,这一点与阻力增量的变化规律相类似,实际上影响机理也是类似的.
从图8中还可以看出,开裂式方向舵单位舵偏产生的侧力增量随舵偏角的增大而增大.在大舵偏情况下,开裂式方向舵偏转产生的附加侧力增量的量值明显大于嵌入面.
3)附加俯仰力矩效应.
以低速情况为例,阻力类偏航操纵装置偏转产生的附加俯仰力矩增量随迎角的变化如图9所示.
俯仰力矩增量主要由附加升力增量对横轴求矩得到,阻力类偏航操纵装置的偏转在提供偏航操纵力矩的同时,会产生耦合的俯仰力矩,引起抬头或低头的俯仰运动.俯仰力矩增量的变化规律与升力增量的变化规律相似.当升力增量为负时,升力有所损失,由于损失的升力源自舵面处,一般位于飞机重心之后,因此引起正的俯仰力矩增量,产生抬头运动,升力损失越大,耦合的抬头运动越严重,反之则产生低头运动.
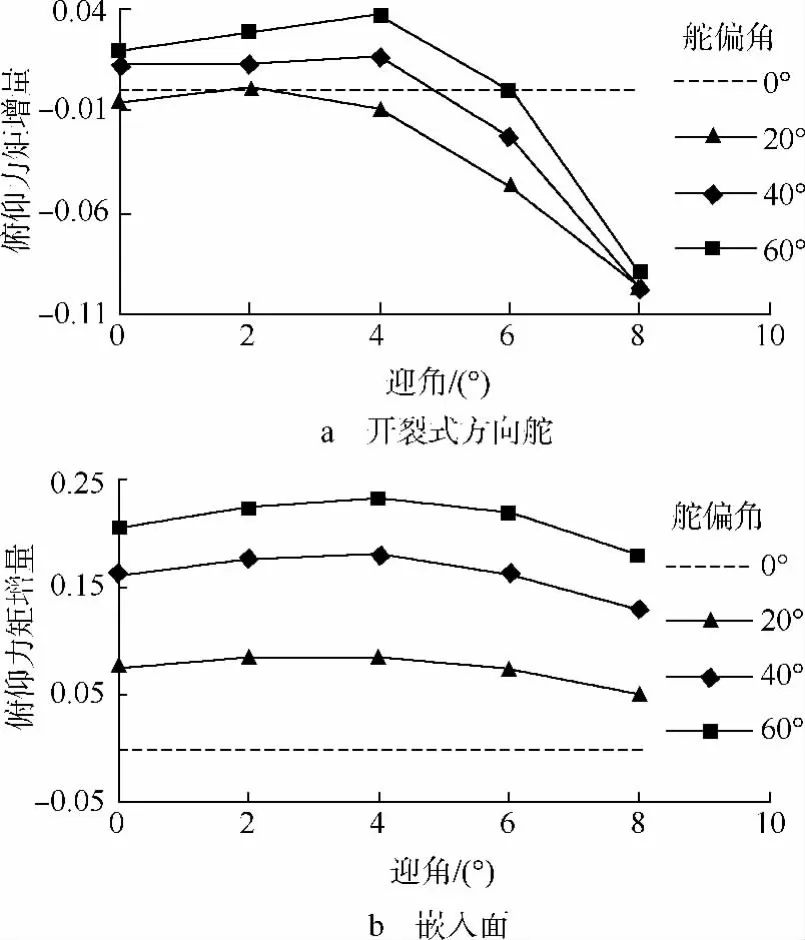
图9 俯仰力矩增量随迎角的变化
4)附加滚转力矩效应.
以低速情况为例,阻力类偏航操纵装置偏转产生的附加滚转力矩增量随迎角的变化如图10所示.
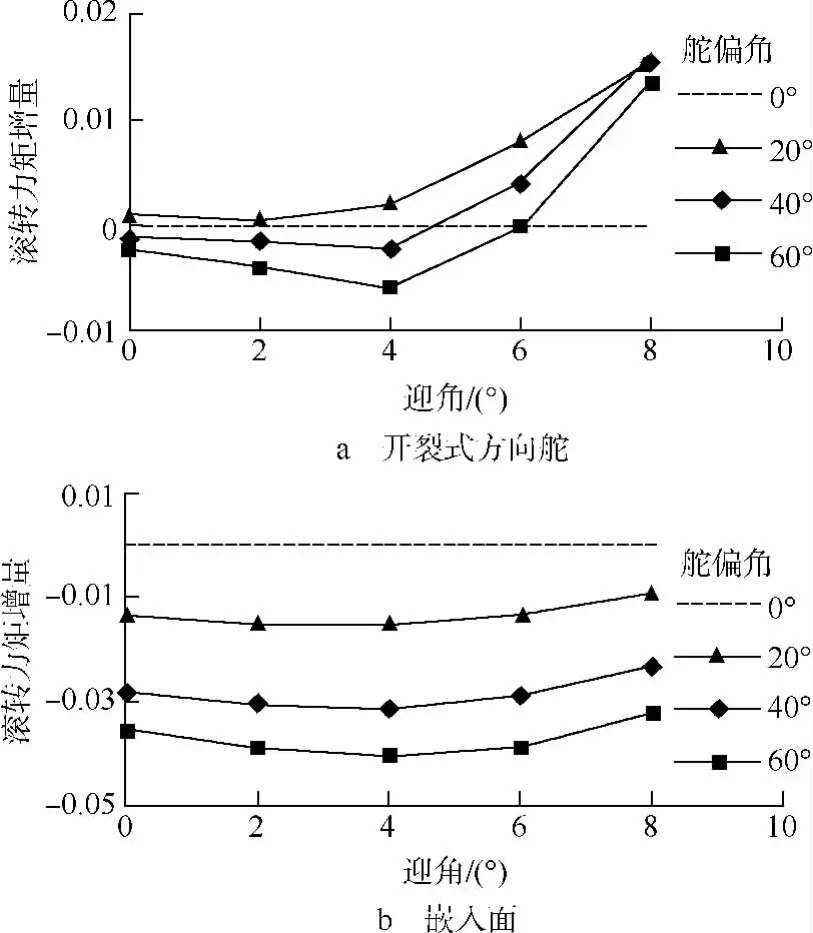
图10 滚转力矩增量随迎角的变化曲线
滚转力矩增量主要由附加升力增量对纵轴求矩得到,阻力类偏航操纵装置的偏转在提供偏航操纵力矩的同时,与滚转力矩存在一定程度的耦合,且滚转力矩增量的变化规律与升力增量的变化规律相似.当右侧舵面偏转造成升力损失时,产生向该侧的右滚转力矩,升力的损失越大,右滚转运动越严重.
如上所述,当右侧升力减小时,产生右滚转力矩,滚转角Δφ>0,滚转力矩ΔL>0,此时升力和重力的合力作用使飞机向右侧滑,侧滑角Δβ>0,由于飞翼布局横向静稳定[9],飞机产生左滚力矩,这一左滚力矩具有减小Δφ,使飞机保持水平的倾向,飞机主要做偏航运动,因此其滚转-偏航协调性较好.
针对本研究的大展弦比飞翼布局和两种舵面模型而言,结合前述分析,可以得出结论:相比于开裂式方向舵,嵌入面的偏航操纵效率更低,在同一舵偏下,升力损失更大,引起更严重的俯仰和滚转耦合,因此,嵌入面的操纵使用特性差于开裂式方向舵.
3.3 对气动特性的影响
阻力类偏航操纵装置的偏转使流经机翼表面的气流折转方向,在流过舵面之后发生分离,并卷起较强的涡,对升阻比产生不利影响.如图11所示,在单侧作动,Ma=0.6情况下,阻力类偏航操纵装置的偏转明显降低了全机的升阻比,舵偏角越大,升阻比下降越明显.因此在巡航飞行时,飞机应收起阻力类偏航操纵装置.
另外,开裂式方向舵和嵌入面对升阻比的影响差别较小,这与两者的型式、尺寸、相对位置不同有关.虽然开裂式方向舵在作动过程中上下偏转,相同偏角下,造成的阻力增量比嵌入面更大,但是升力的降低更小.
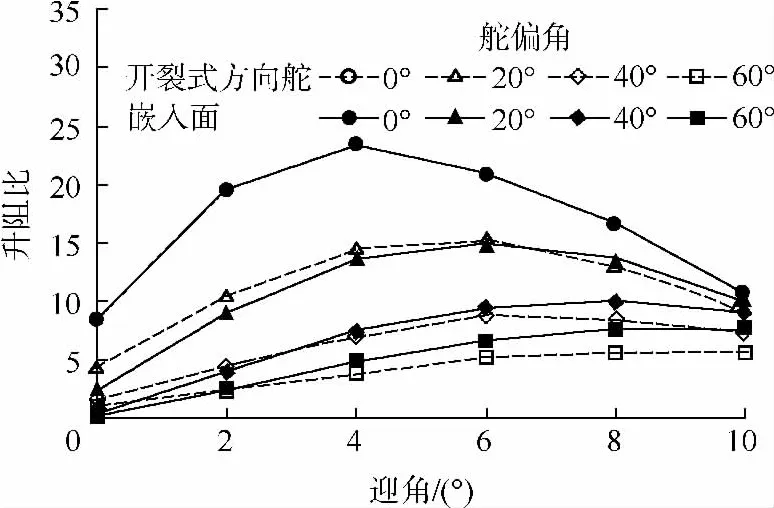
图11 阻力类偏航操纵装置偏转对升阻比的影响
3.4 对纵向静稳定特性的影响
与常规布局相比,飞翼布局最显著的特点是取消了常规的尾翼,因此稳定特性较差.阻力类偏航操纵装置在使用过程中会改变气动构型,影响全机纵向静稳定特性.通过与作战任务、飞行包线的匹配,能够发挥其改进纵向静稳定性的作用,如图12所示为阻力类偏航操纵装置舵偏角与飞机纵向静稳定性的关系曲线,其中“焦点位置变化”由式(2)得到[10]:
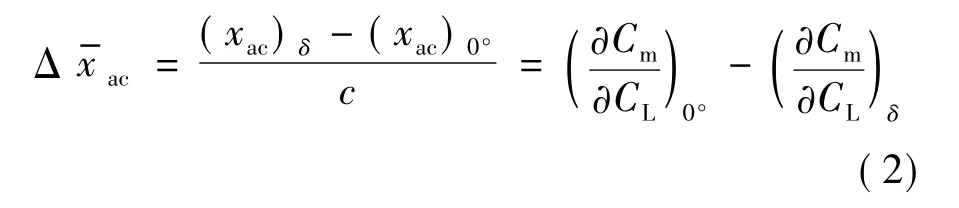
其中c为平均气动弦长.而零升俯仰力矩系数Cm0由式(3)求得:

可见,随着开裂式方向舵和嵌入面舵偏角的增大,焦点位置均向后移动,在Ma=0.2、开裂式方向舵舵偏角为60°时,其向后移动的幅度甚至达到4%c.同时零升俯仰力矩系数Cm0由负转正,在嵌入面上表现得尤为明显.可见,阻力类偏航操纵装置的使用改善了纵向静稳定性.这一点与文献[5]关于纵向静稳定性方面的结论是一致的.

图12 纵向静稳定性随舵偏角的变化
从图12中还可以看出,同一舵偏角下,Ma=0.2的低速情况,焦点后移量比Ma=0.6的高速情况更大,因此在起飞着陆阶段,适当偏转阻力类偏航操纵装置,可作为辅助纵向配平操纵面使用,尤其在着陆阶段,可将舵面对称偏转至较大角度,既增大着陆阻力,又改善了纵向静稳定性.
4 结论
1)阻力类偏航操纵装置利用气流分离引起的离轴阻力和附加侧力增量获得偏航力矩,是一类效率较高的航向操纵舵面.开裂式方向舵和嵌入面两种舵面的偏航力矩增量、偏航操纵效率随舵偏角的增大而增大,均呈非线性关系.小舵偏角下,偏航操纵效率较低;大偏角下,效率得到提高,且开裂式方向舵的操纵效率高于嵌入面.
2)阻力类偏航操纵装置的偏转会产生严重的三轴操纵耦合,具有显著的附加力和力矩效应.一般而言,耦合效应随着舵偏角的增大而增强,且嵌入面的操纵耦合效应强于开裂式方向舵.
3)阻力类偏航操纵装置的偏转会影响飞机的气动构型,对升阻比产生不利影响,舵偏角越大,升阻比的降低越明显.
4)阻力类偏航操纵装置的作动对飞翼布局飞机纵向静稳定性有一定的改善作用.
References)
[1]Bowlus J A,Multhopp D.Challenges and opportunities in tailless aircraft stability and control[R].AIAA-97-3830,1997
[2]Dorsett K M,Meiil D R.Innovative control effectors(ICE)[R].WL-TR-96-3043,1996
[3]Gillard W J.Innovative control effectors(configuration 101)dynamic wind tunnel test report rotary balance and force oscillation tests[R].AFRL-VA-WP-TP-1998-3043,1998
[4]王睿,祝小平,周洲,等.阻力方向舵在飞翼式高空长航时无人机的应用[J].西北工业大学学报,2008,26(6):673 -677
Wang Rui,Zhu Xiaoping,Zhou Zhou,et al.Exploring utilization of drag rudder in stability and control of flying wing UAV[J].Journal of Northwestern Polytechnical University,2008,26(6):673-677(in Chinese)
[5]王磊,王立新.飞翼布局飞机开裂式方向舵的作用特性和使用特点[J].航空学报,2011,32(8):1392 -1399
Wang Lei,Wang Lixin.Control features and application characteristics of split drag rudder utilized by flying wing[J].Acta Aeronautics et Astronautics Sinica,2011,32(8):1392 - 1399(in Chinese)
[6]张子军,黎军,李天,等.开裂式方向舵对某无尾飞翼布局飞机气动特性影响的实验研究[J].实验流体力学,2010,24(3):63-66
Zhang Zijun,Li Jun,Li Tian,et al.Experimental investigation of split-rudder deflection on aerodynamic performance of tailless flying wing aircraft[J].Journal of Experiments in Fluid Mechanics,2010,24(3):63 -66(in Chinese)
[7]Gregory A A,James H M.Control-surface deflection effects on aerodynamic response nonlinearities[R].AIAA-2000-4107,2000
[8]Menter F R.Two-equation eddy-viscosity turbulence models for engineering applications[J].AIAA Journal,1994,32(8):1598 -1605
[9]Sergio E.Static and dynamic analysis of an unconventional plane:flying wing[R].AIAA 2001-4010,2001
[10]Etkin B.Dynamics of flight:stability and control[M].New York:John Wiley and Sons,1995:20 -33
猜你喜欢
装备环境工程(2022年9期)2022-10-13
装备环境工程(2022年7期)2022-08-10
兵器装备工程学报(2021年12期)2022-01-11
民用飞机设计与研究(2021年1期)2021-04-06
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
北京航空航天大学学报(2018年1期)2018-04-20
科学与财富(2018年1期)2018-03-03
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年5期)2017-11-23
