一种基于SAR目标形态特性的舰船检测方法
2014-10-31 08:15:12杨学志杜扬张晰孟俊敏
遥感信息 2014年5期
杨学志,杜扬,,张晰,孟俊敏
(1.合肥工业大学 计算机与信息学院,合肥 230000;2.国家海洋局 第一海洋研究所,山东 青岛 266061)
1 引 言
海洋舰船监测识别一直是海岸带国家的传统任务,例如在渔业管理、非法移民、救助等有着重要的作用,合成孔径雷达(Synthetic Aperture Radar,SAR)因为其全天时全天候大范围观测的工作优势,成为舰船目标监测的重要传感器。
由于舰船目标通常由金属构成,在SAR图像上呈现一个或多个较亮的强散射中心,与海洋背景有着鲜明的对比度,因此目前的舰船检测算法大多基于恒虚警率(Constant False Alarm Rate,CFAR)的灰度阈值分割 算 法[1-2],算 法 的 品 质 因 素 (Figure of Merit,FOM)主要依赖于概率模型的建立和虚警概率(Probability of False Alarm,PFA)[3]的设置。常用的SAR统计模型有对数正态分布、Gamma分布、Weibull分布、K分布等,需要根据分布对图像的拟合情况经验选取[4-5]。算法中当PFA选取过低,结果会出现部分舰船目标丢失,特别是弱小舰船;而当选取过高,结果中会出现大量虚警目标。通常希望CFAR算法能通过设置较低的PFA得到较高的检测率,这几乎是所有基于CFAR的舰船检测算法中不可避免的矛盾,对参数PFA的选择存在较多的人工干预,使得最终检测结果不稳定,这也是CFAR算法仅仅是考虑舰船目标高亮度及在局部图像中较低比例的特性而引起的。
通常算法流程中添加后处理操作来抑制虚警目标,经典的方法有形态学处理(Morphology Operations,MO)方法[3],譬如开操作、闭操作等手段实现虚警目标的抑制。但形态学滤波方法仅仅从目标尺度角度出发,没有考虑SAR图像舰船目标的形态特征,因此检测效果有一定随机性,适用范围较小。SAR图像中舰船目标通常表现为强散射点或面目标,拥有较强的统计和形态特征,譬如相对海杂波所占比例较低、亮度高、空间密集度高。对于所占目标比例较低这一统计特征,在CFAR检测算法中设置适当的PFA即可消除大量海杂波;对于后两个高亮度、高密集度的形态特征,本文推导了一种目标形态特征强度估计值来度量,提出一种新的舰船检测后处理操作。
2 舰船形态特征检测算法
由于SAR系统特殊的成像原理和舰船的多金属反射角结构,图像中舰船目标与海洋背景成鲜明对比。因此为了充分利用SAR影像中舰船特性,提出了本文检测方法。
2.1 SAR图像中舰船目标特性
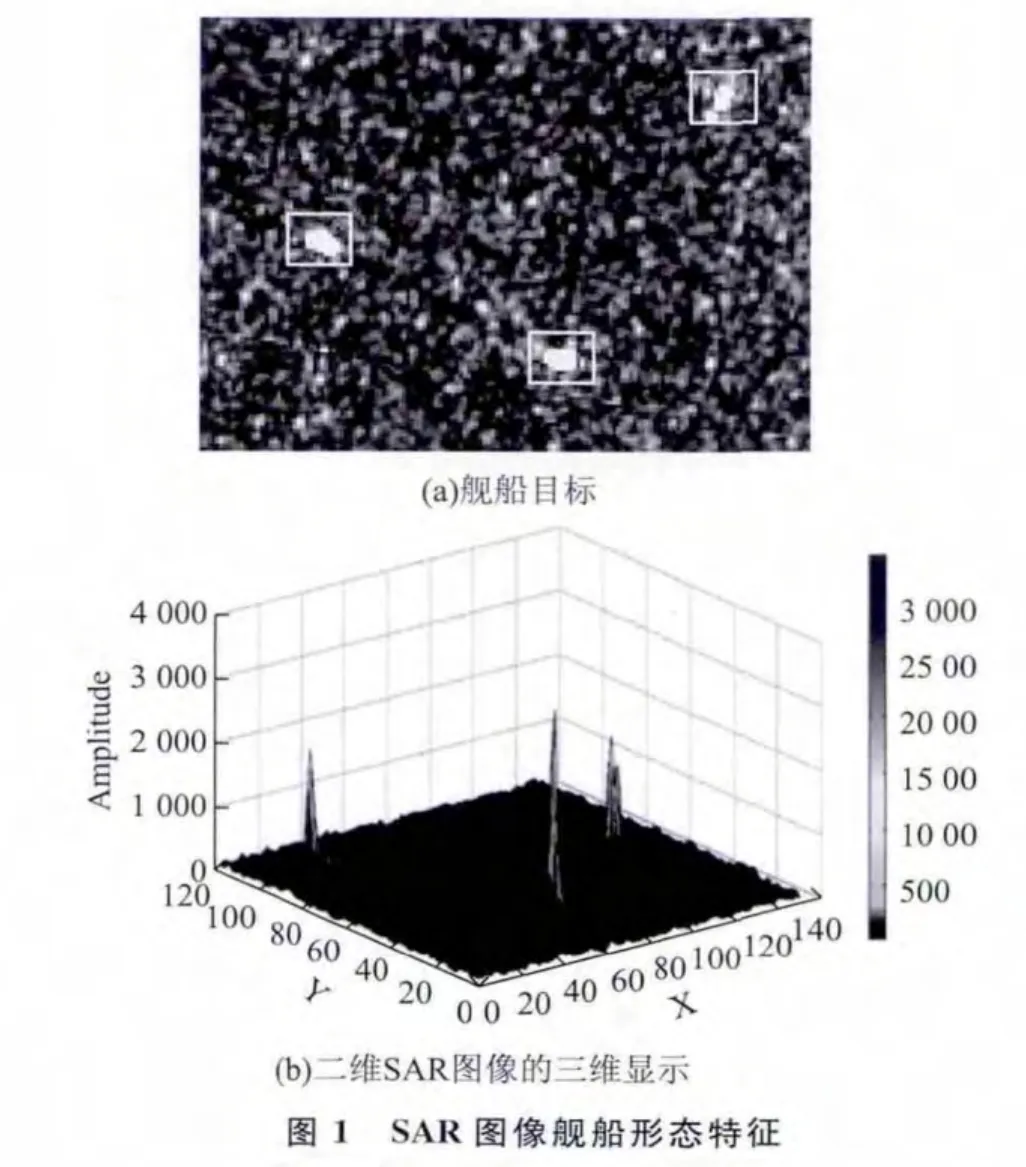
由于合成孔径雷达特殊的工作原理,舰船目标由于金属材料的上层建筑会构成较多的二面角、三面角结构,对于雷达波束形成比较强的反射器,在SAR图像中舰船目标相比于海杂波呈现较为强亮度的点目标或面目标,如图1所示。
其中,图1(a)为一张典型SAR图像,白色矩形框为舰船目标,图1(b)为其三维立体显示。不难总结出舰船目标的3个形态特征:①舰船目标所占比重很低;②舰船目标像素亮度值高;③舰船目标像素密集度高。这3种特征几乎概括了舰船目标在SAR图像中主要的统计特征和形态特征。
2.2 二阶舰船特征检测算法
传统CFAR算法是基于统计特征①的概率统计算法。然而SAR图像因获取模式、极化方式、自然条件等情况不同,使得CFAR算法中的虚警率参数设置难以掌控,通常需要依据经验知识。此外,该参数还与漏检率存在不可避免的矛盾。
本文结合了SAR图像中舰船特性,给出了基于CFAR算法预处理和形态学检测的舰船检测方法,检测流程如图2所示。
2.2.1 第一阶段CFAR
利用简单有效的直方图累加CFAR算法,给定一个较高PFA值(经验选取10e-1~10e-2),快速去除大量海杂波,且保留完整的舰船信息[5]。
SAR图像中舰船目标几乎都在长拖尾中,根据给定虚警率PFA,累计概率密度值,如不等式:

其中,ρ(j)为海杂波直方图统计概率,j∈[0,65535],当满足式(1),Tcfar(Threshold of CFAR)为所求该阶段分割阈值。
2.2.2 第二阶段形态特征计算
核密度估计算法(Kernel Density Estimation,KDE)是一种经典的非参数的数据结构分析工具,利用舰船像素密集特性,在高分辨率SAR舰船检测中,可以有效抑制检测结果中的舰船旁瓣效应[6-7],密集度值可表示为:

其中,x为当前像素,密度统计窗口半径h>0,di为统计窗内像素点到中心x的欧式距离,计算式可表示为检测目标像素的密集程度。然而KDE算法没有考虑到舰船目标在SAR图像中独特的高亮像素值特性。因此这里结合式(2)推导出舰船目标形态特征强度计算公式,如式(3)所示。

其中,max(xi)为统计窗像素灰度最大值,表征为检测目标像素高亮度特性。因此不难看出,式(3)最终结果由当前像素统计窗像素的密集度和像素值大小决定,值越大说明舰船目标可能性越大。在该式下舰船目标被突显,海杂波等虚警目标被抑制。最后根据给定阈值Tmo∈(0,1)(Threshold of MO),最终分割出舰船目标。下面将分别叙述参数h和Tmo的意义,以及选取范围。
3 算法参数选择及实验
本文提出的算法理论充分利用了SAR图像中形态特征,也解决了传统CFAR算法中固有的矛盾,但也设计到两个参数,一个是移动窗大小h和形态强度特征分割阈值Tmo,因此需要对这两个参数选择给出办法。
3.1 参数选择
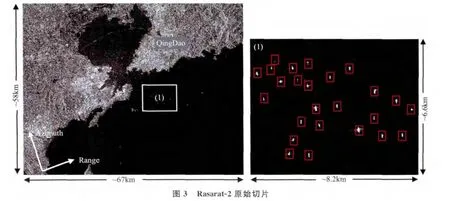
实验数据选为Radarsat-2Standard数据,VH极化方式,距离向和方位向分辨率分别为13.5m和7.7m,像素空间分别为11.8m和5.2m。获取时间2012年4月30号10∶00∶27(UTC);子区域(1)像素大小为1389×1145,区域为中国山东青岛,如图3所示。为验证本文算法舰船检测结果的有效性,使用星载SAR数据获取时间一致的自动识别系统(Automatic Identification System,AIS)信息[8],匹配结果如实验区域(1)中,该区域共有舰船25艘。
特征统计窗h为舰船特征估计统计窗大小,很明显h越大获得的信息越多,算法耗时越大,特征值计算结果使得图像较为平滑,舰船目标不易突显,检测率可能会下降。下面给出实验结果与耗时,其中,参数Tmo取经验阈值0.4。
图4可看出,随着h增大,虚警目标逐渐减少,舰船轮廓逐渐清晰,十字旁瓣等效果减弱,处理时间增加;当h≥9时,虚警目标几乎消除,但舰船目标轮廓越来越小,使得弱小舰船目标出现丢失,譬如图4(e)(f)实验结果,圆圈○表示漏检。因此h过小使得虚警目标难以抑制,过大使得检测目标出现丢失,h的设置也与检测区域舰船尺度有关[7],为检测弱小舰船目标h应当减小。
Tmo为特征图像中的分割阈值,Tmo∈(0,1)。明显地,Tmo越大虚警减少,但真实舰船目标丢失可能性越大。为有效评价检测结果,这里定量分析参数对结果的影响,使用品质因素FOM[4]来衡量检测效率。

其中,Ntt为正确检测的舰船结果,Nfa为虚警目标,Ngt为图像中实际的舰船目标,FOM越大表明检测效果越好。
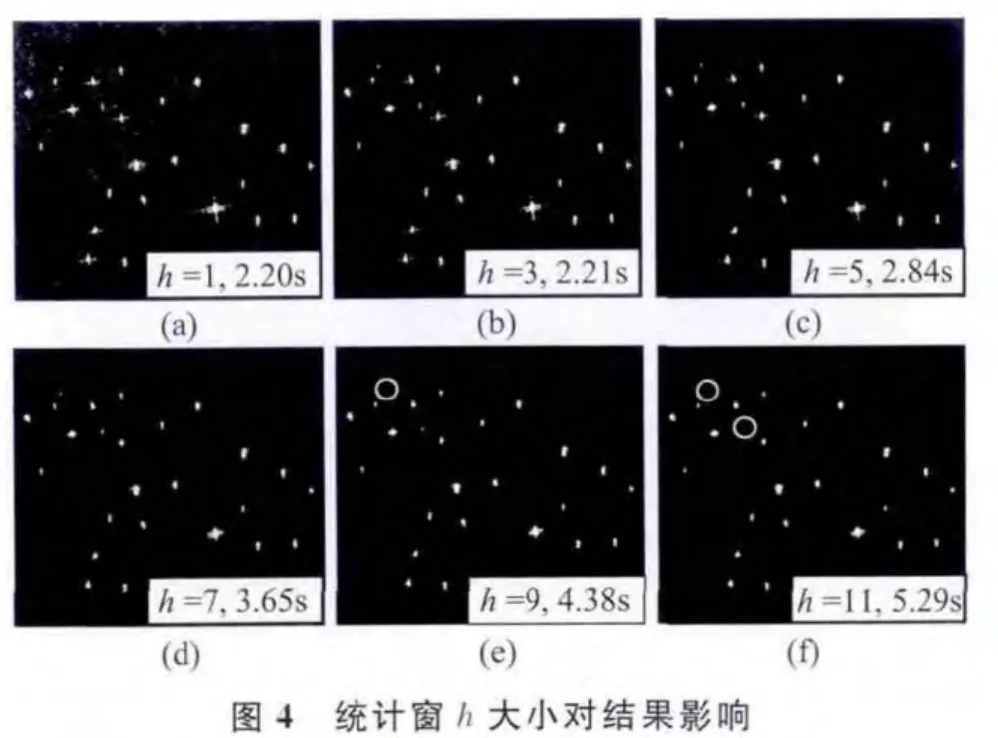
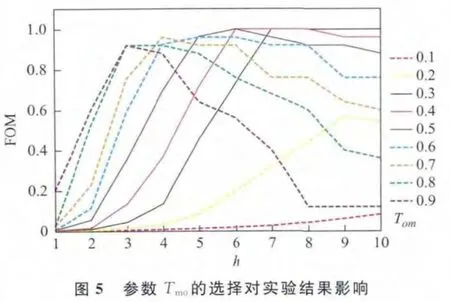
图5中横坐标为统计窗h在[1,10]中。当阈值参数Tmo取值在[0.1,0.4]时,随着h的增大,检测结果FOM 缓慢升高;当Tmo在[0.5,0.9]时,随着h的增大,FOM先迅速升高然后降低。图5中红色(Tmo=0.3)和黑色实线(Tmo=0.4)随着h的增大FOM越大而且保持较为稳定。
3.2 本文算法实验及对比
图6(a)为一景 TerraSAR-X,2011年09月21号22∶10∶17(UTC)获取,获取模式Stripmap SLC,3m分辨率,HH极化,中国日照港,选用的是高噪声单视复(Single-Look Complex,SLC)数据,SLC数据保留了各种波模式下的最优分辨率信息,舰船目标特征保留完整,弱小舰船目标清晰可见。
黄色实验区域(b)像素大小为1069×1297,绿色矩形窗为AIS数据信息,图像中可清晰看见弱小舰船目标,舰船共11艘。下面是传统方法与本文方法检测结果。
对比图7中橙色矩形框为正确检测目标,蓝色三角为虚警目标,红色圆圈为漏检目标。图7(a)当PFA选择10e-2时CFAR检测结果中出现大量虚警目标;图7(b)KDE结果虚警目标仍然很多,如蓝色三角所示;传统形态学处理结果图7(c)出现漏检,如红色圆圈所示;而本文方法检测出所有舰船目标,并消除虚警干扰。
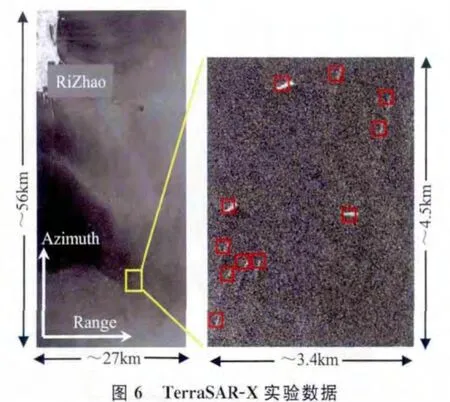
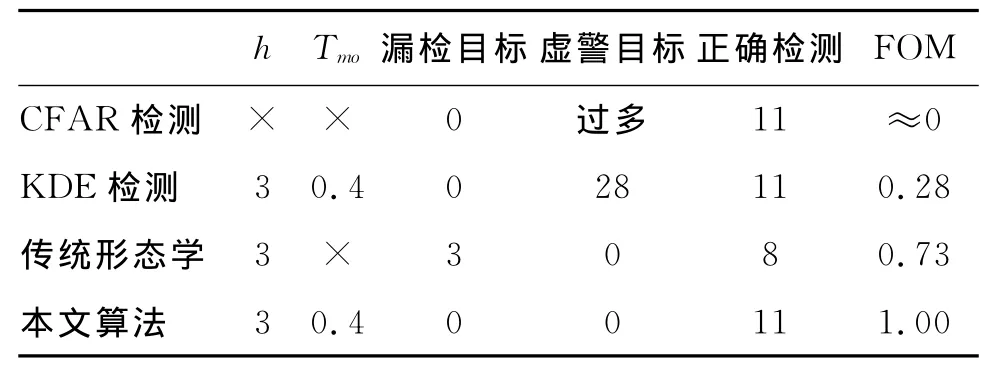
表1 图7检测结果
图8为一景Cosmo-Skymed图像,2010年7月20号10∶07∶32(UTC)获取,获取模式为ScanSAR Wide Region,30m分辨率,15m像素空间大小,HH极化,中国大连。黄色实验区域像素大小为876×1123,绿色矩形窗为AIS数据信息,总共为40艘舰船。
图9中,橙色矩形框为正确检测目标,蓝色三角为虚警目标,红色圆圈为漏检目标。在第一阶段较高的虚警率条件下结果为图8(a)所示;图8(b)单纯KDE方法出现大量虚警目标,传统形态学处理丢失弱小)舰船目标。


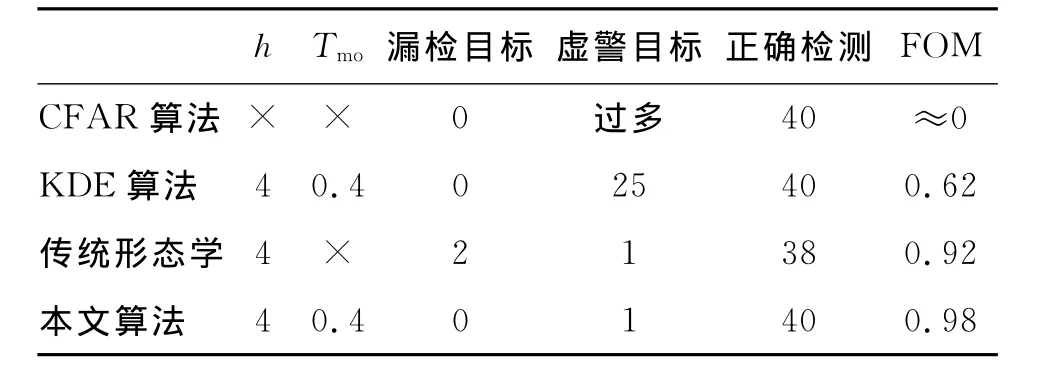
表2 图9检测结果
从以上两组实验可看出,本文舰船检测方法充分利用了SAR图像中舰船目标高亮度、高密集度的形态特性,首先在CFAR阶段,设定较高虚警率值滤除大量海杂波保存舰船目标,然后在特征强度计算阶段成功滤除虚警目标,获得了较好表现;而传统方法由于特性选取片面,出现了虚警目标。
4 结束语
本文充分考虑SAR图像中舰船人造目标的高亮度和高密集度的形态特性,由此从图像层面出发提出了基于直方图累加CFAR算法和目标特征值估计的二阶舰船检测算法,为SAR图像舰船检测提供了新的思路。本文详细讨论了算法中参数的意义以及参数选取对结果的影响。实验表明,本文提出的舰船检测算法避开了传统CFAR算法复杂的概率模型的选择和参数的调设,可满足舰船检测需求。但算法中参数设置仍然无法固定,还需要进一步讨论。
[1]WANG J,SUN L J.Study on ship target detection and recognition in SAR imagery[C].2009 1st International Conference on Information Science and Engineering(ICISE),IEEE,Beijing,China,2009:1456-1459.
[2]JIANG Q,WANG S,ZIOU D,et al.Automatic detection for ship targets in Radarsat SAR images from coastal regions[C].Vision Interface'99,Trois-Rivières,Canada,May,1999:131-137.
[3]ELDHUSET K.An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions[J].IEEE Transactions on Geoscience and Remote Sensing,1996,34(4):1010-1019.
[4]种劲松,朱敏慧.SAR 图像舰船及其尾迹检测研究综述[J].电子学报,2003,31(9):1356-1360.
[5]陈利民,孟俊敏,杨学志,等.基于 H—CFAR的SAR图像快速舰船目标检测[J].合肥工业大学学报(自然科学版),2012,35(12):1633-1636.
[6]SHEATHER S J,JONES M C.A reliable data-based bandwidth selection method for kernel density estimation[J].Journal of the Royal Statistical Society,Series B (Methodological),1991,53(3):683-690.
[7]JIANG S,WU F,WANG C,et al.Improved ship detection for high resolution SAR images based on kernel density estimation[C].Remote Sensing,Environment and Transportation Engineering (RSETE),2012 2nd International Conference on IEEE,Nanjing,China,June,2012:1-4.
[8]张晰.星载SAR舰船目标探测实验研究[D].青岛:中国海洋大学,2008.
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28
舰船科学技术(2022年21期)2022-12-12 08:07:10
兵工学报(2022年11期)2022-12-01 12:52:12
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
舰船科学技术(2021年12期)2021-03-29 01:28:44
物联网技术(2019年9期)2019-11-06 06:24:49
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
科学与财富(2017年24期)2017-09-06 09:52:35
设备管理与维修(2017年1期)2017-04-11 03:21:42
CHIP新电脑(2016年3期)2016-03-10 14:22:03