无刷直流电机网络伺服控制技术研究
2014-10-27 01:48:20祁树胜
西安航空学院学报 2014年1期
祁树胜,祁 特
(1.西安航空学院 电气学院,陕西 西安 710077;2.天津大学 材料科学与工程学院,天津 300072)
1 简介
近些年来,电机网络控制已成为运动控制技术领域的研究热点之一。网络的应用为系统带来了诸多的优势,同时也给系统的控制带来了一些难题,如传输延时,数据包丢失等。这些问题不但会影响系统的动态特性,还有可能使系统变得不稳定。因此,网络的引入还使系统的分析变得更加复杂,系统的控制也变得困难。
本文提出了一种无刷直流电机网络伺服控制系统的设计方案。考虑了网络系统前向及反馈通道均存在延时的情况,网络伺服控制器采用基于模糊自适应调节的广义预测控制算法。在假设网络延时有界的前提下,考虑了双向延时对系统控制特性的影响,采用预测控制算法计算控制律以改善系统的鲁棒性,以模糊自适应调节算法来克服系统参数不确定对系统控制特性的影响。
2 系统分析
系统结构如图1所示。系统包括:网络控制器,网络延时补偿器,电机本体,传感器和执行器。传感器和执行器为时间驱动。控制器为事件-时间驱动。执行器端设置延时补偿器以补偿前向通道延时。反馈通道延时补偿由网络控制器完成。
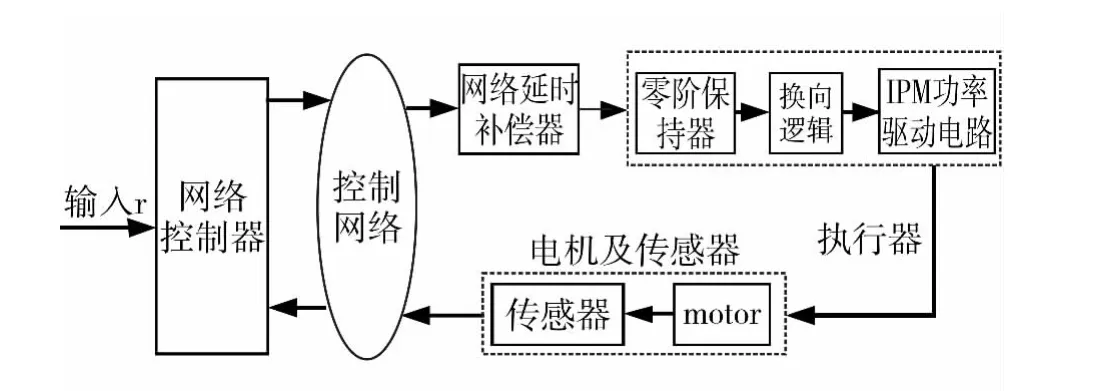
图1 系统结构图
2.1 电机模型
无刷直流电动机工作在两相导通星形三相6状态方式下,电磁转矩方程为:

式中:Te为电磁转矩,N·m;ω为电动机转子机械角速度,rad/s。电机机械运动方程:

式中:TL为负载转矩,Nom;J为电机转动惯量,kg/m2。
由于无刷直流电动机工作在两相导通星形三相6状态方式下,则有:

式中:u为导通两相的支路电压,V;i为导通两相的支路电流,A;ep为导通相的相反电动势,V。
由电磁转矩方程可得:

由于反电动势波形的平顶宽度为120°电角度的梯形波,则有:ep=Keω
式中Ke为电动势系数,V/(rad/s)。
将以上各式进行拉氏变换可得:
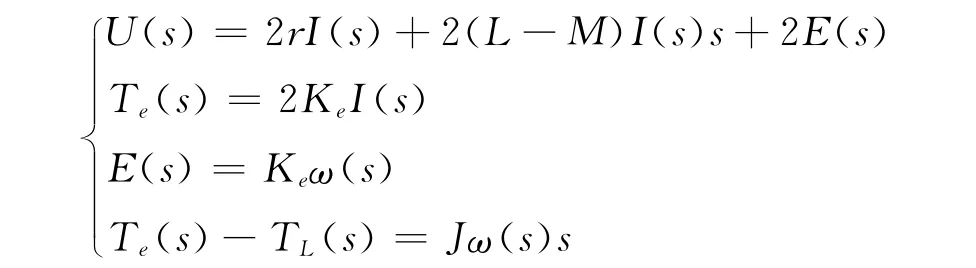
可把负载转矩TL看成一种干扰,考虑空载情况,可得:

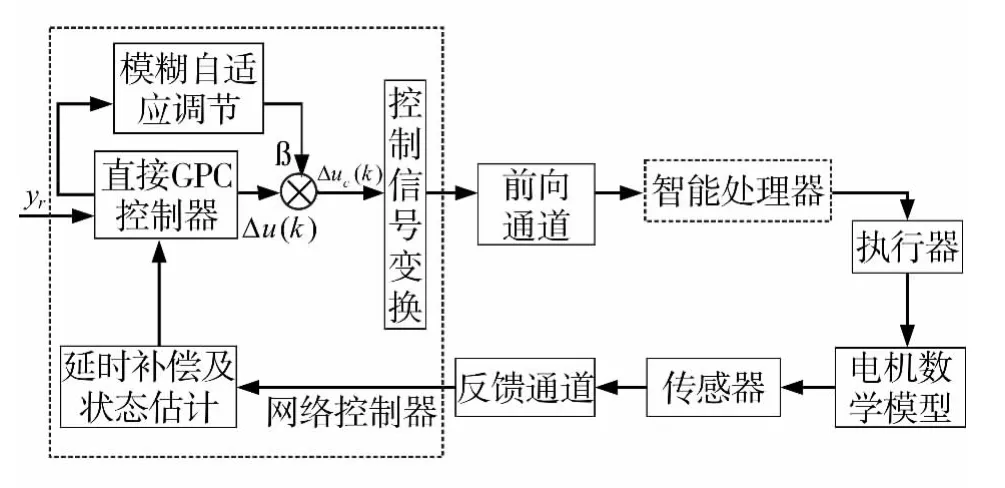
图2 控制系统原理图
2.2 基于模糊自适应调节的广义预测控制器的设计
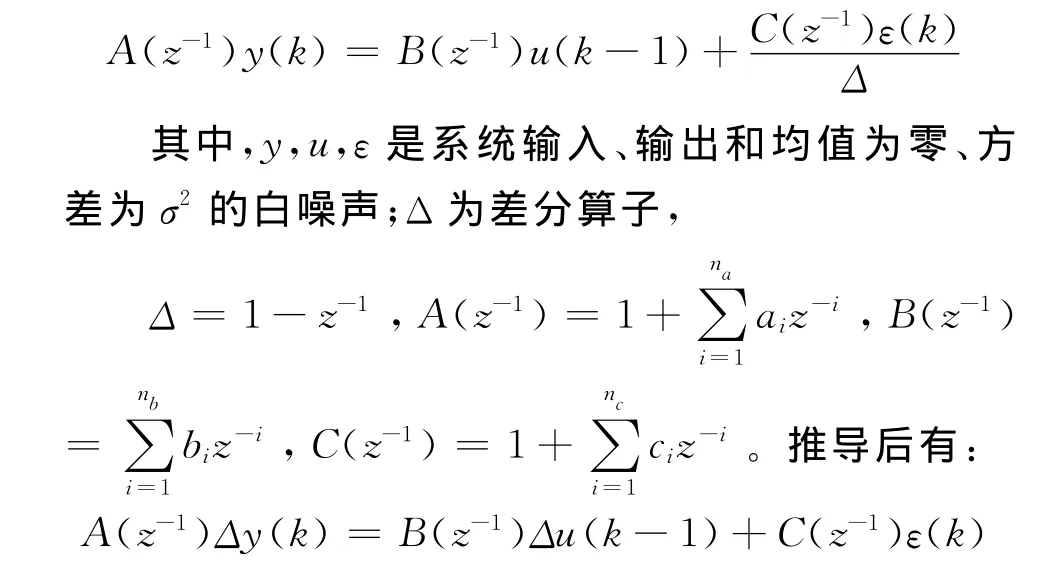
网络控制系统原理图如图2所示。图中采用智能处理器作为执行器的延时补偿器。网络控制器由GPC控制器、延时补偿及状态估计、模糊自适应调节器及控制信号变换器组成。被控对象数学模型可表示为:
根据Diophantine方程,可以得到被控对象前向预测方程:

定义:

则性能指标函数可表示为:


取(GTG+λI)-1GT的第一行记为:

根据滚动优化和反馈校正的原理,控制律增量可表示如下:
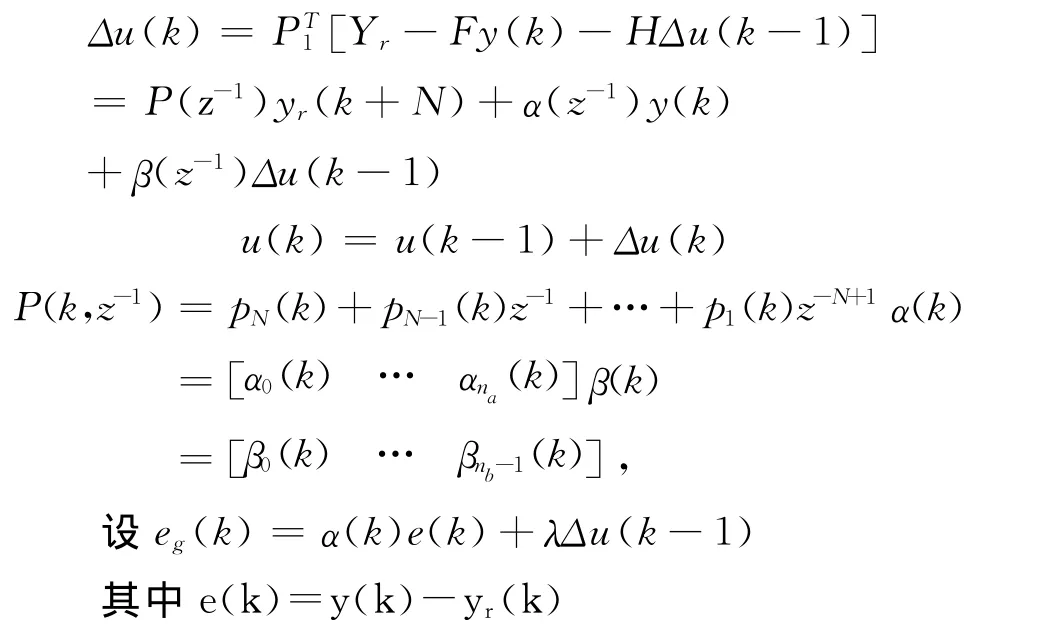

网络控制器的输出为:

采用如下模糊控制规则:

βi是和β对应的跟随参数,β1和β2的模糊自适应调节算法采用在线调整的方法。
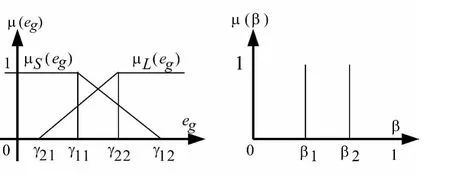
图3 输入eg,输出β的隶属度函数
隶属度函数参数μS(eg),μL(eg)定义如下:
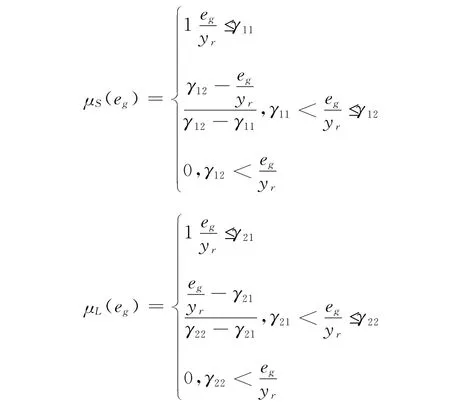
其中,yr为参考输入,其中0<γ21<γ11<γ22<γ12<1,0<β1<β2<1.则瞬态性能指标J(k)定义为:
由最速下降法可有:

其中为下降速率,且:
由于控制器选择为直接GPC控制,则:综合整理后,设
3 仿真实例
本文基于MATLAB2008/SIMULINK,建立无刷直流电机控制系统模型。电机参数设置为:定子相绕组电阻R=0.5Ω;定子相绕组自感L=0.04H;互感 M=-0.0055H;转动惯量J=0.02kg·m2;阻尼系数B=0.0002N·m·s/rad;极对数P=2;每相反电动势系数k=0.03;150V直流电源供电。
情况1:GPC本地控制。此时,控制环内无网络。GPC控制的仿真结果如图4所示。
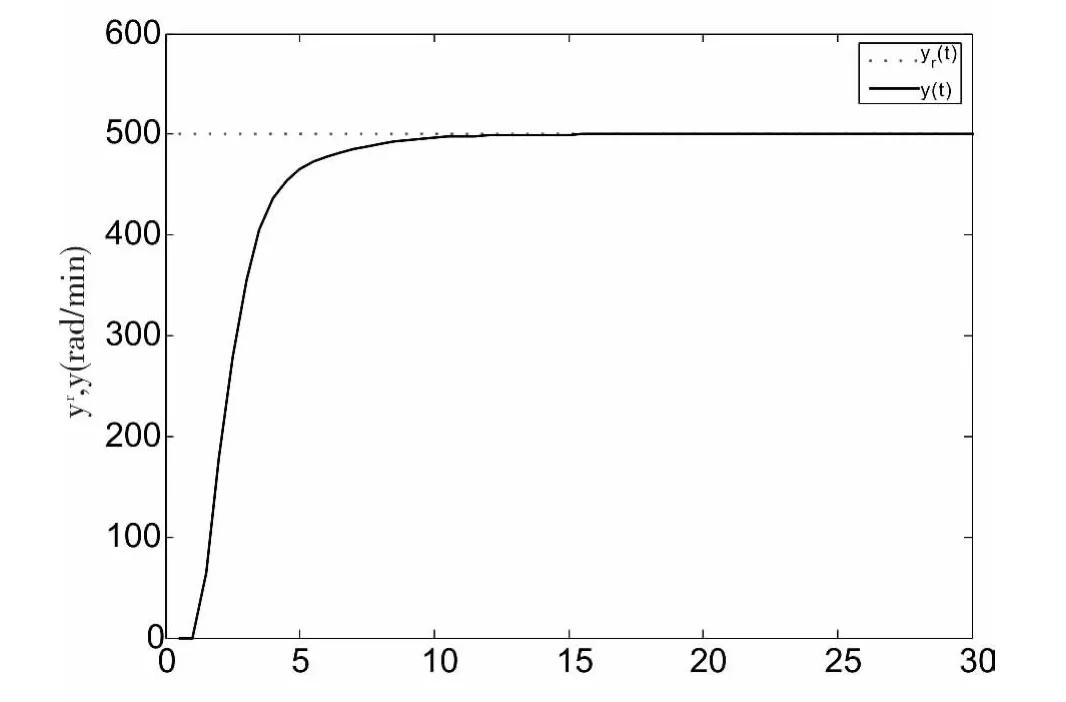
图4 本地控制波形
情况2:无模糊自适应调节的GPC网络控制
GPC控制可以补偿网络延时。网络总延时不超过3个采样周期。仿真结果如图5所示。
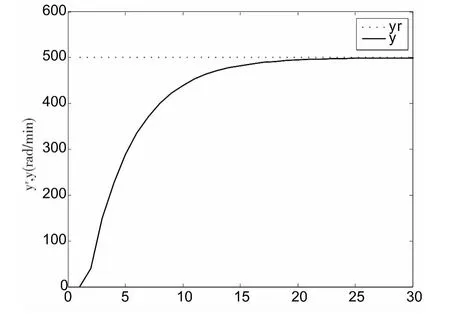
图5 GPC控制波形
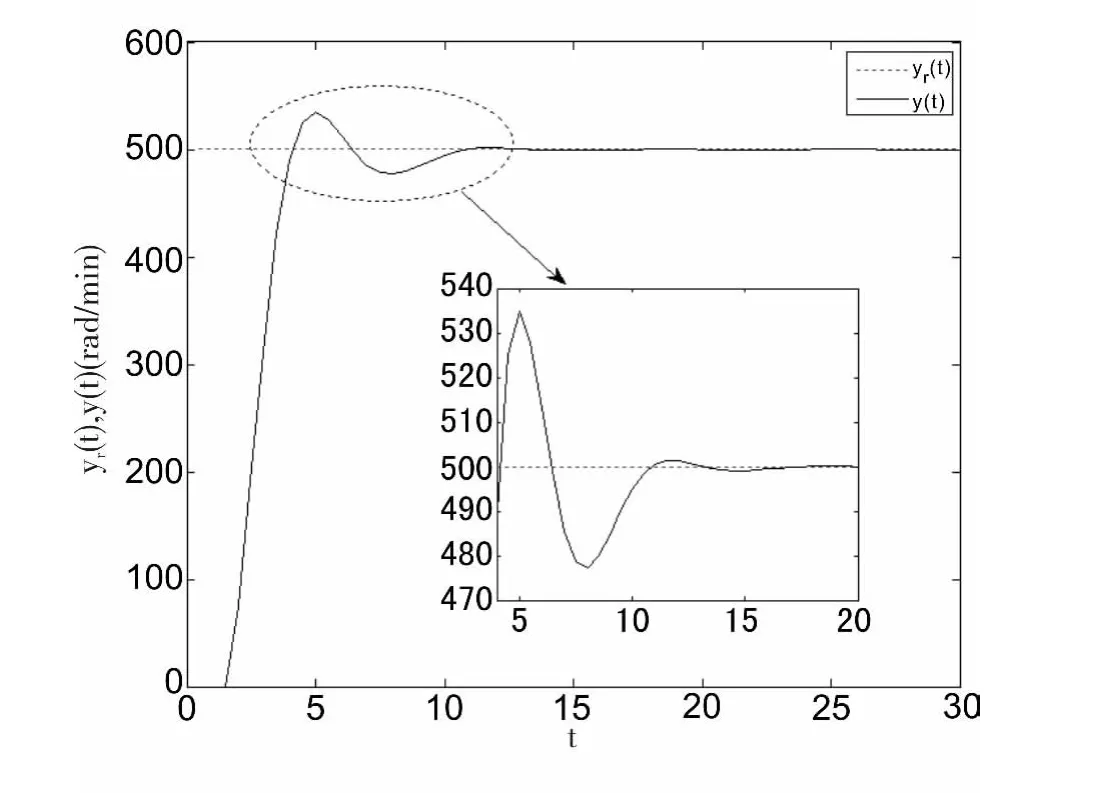
图6 具有模糊自适应调节的GPC控制
情况3:具有模糊自适应调节的GPC控制。此时网络总延时不超过3个采样周期。速度响应如图6所示。相比常规的GPC控制,调节时间减小,经过一次振荡,系统快速进入稳态。仿真结果表明了该控制系统良好的快速性。
4 结语
本文提出针对具有双向有界延时,即具有前向及反馈通道延时的直流电机网络控制设计方案。设计了基于模糊自适应调节的广义预测控制算法的网络控制器。采用预测控制算法计算控制律以减小网络延时对系统控制特性的影响,同时能改善系统的鲁棒性。模糊自适应调节用于进一步提高系统的快速性。仿真结果证明了该法的有效性。
[1]Y.Xia,G.-P.Liu,M.Fu,et al.Predictive control of Networked systems with random network delays and data dropout[J].IET Theory and Application,2009,11(3):1476-1486.
[2]LI H,CHOW M,SUN Z.Optimal stabilizing gain selection for networked control systems with time delays and packet losses[J].IEEE Transactions on Control Systems Technology,2009,17(5):154-162.
[3]N.B.Almutairi,Mo-Yuen Chow.Adaptive fuzzy modulation(AFM)for IP networked PI control systems-part Ι:Partial adaptation [J].IECON,2002(6):3152-3157.
[4]Liu G.p,Mu J.Design and stability analysis of networked control systems with random communication time delay using the modified MPC [J].Int.J.Control,2006,79(4):288-297.
[5]G.P.Liu,D.Rees,S.C.Chai,et al.Simulation and implementation of networked predictive control systems[J]Meas.Control,2005,38(1):17-21.
猜你喜欢
自动化仪表(2020年10期)2020-11-13 03:31:00
测控技术(2018年12期)2018-11-25 09:37:50
制造技术与机床(2017年6期)2018-01-19 02:41:07
制造技术与机床(2017年9期)2017-11-27 02:13:45
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
船舶力学(2015年6期)2015-12-12 08:52:20
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车维护与修理(2014年10期)2014-02-28 12:15:01