基于ANSYS Workbench取物机器人的有限元静态分析
2014-10-12 08:52:12牛晓蓉李卫国全晓飞闫秀芳乔秀芸
机械工程师 2014年3期
牛晓蓉,李卫国,全晓飞,闫秀芳,乔秀芸
(内蒙古工业大学机械学院,呼和浩特 010051)
0 引言
工业机器人作为生产自动化设备,已经在现代制造业中发挥着巨大的作用。但是近年来随着科学技术的发展,机器人已远远超出了服务制造业的范围,被广泛地应用于非制造业领域,在人类生活应用中不断地扩大。特种机器人技术主要是指非制造业中的各种先进机器人及其相关技术[1],特种机器人是替代人类在危险、恶劣环境下作业必不可少的工具。在不适宜人类的工作环境中或者对于不方便拿取、搬运物品的老年人及残疾人,取物机器人可以帮助人们完成抓取、转移物品的工作。本文新设计一种取物机器人,以其整体机械结构为研究对象,利用Pro/E软件和ANSYS Workbench软件,对于处于危险姿态下的机器人进行了有限元静态分析,以获得其薄弱环节,为取物机器人的进一步优化设计提供理论数据。
1 机器人的机械机构设计方案
本文所研究的取物机器人设计目的是用于抓取、转移物品的取物机器人。机械结构主要由底盘、平行架、夹手、套筒、伸缩臂、支架等组成,其结构如图1所示。

图1 取物机器人机械结构
由图1可见,机器人的支架与底盘是焊接连接,平行架下端与底盘铰接,伸缩臂与套筒连接,套筒则与平行架铰接。套筒、平行架和底盘构成了一个平行四边形,利用平行四边形中连杆与机架始终平行的特点,可以保证在运动过程中被抓取物体的平稳。另外,伸缩臂与套筒之间可相对运动实现夹手伸缩量的微调。支架与平行架之间由钢丝绳连接,通过固定在支架上的电动机带动钢丝绳拉动平行架收回直立。机器人夹取物品的受力情况与机器人未夹取物品的受力情况不同,为了确保安全及放置物品位置的准确性,需要研究机器人夹取物品后机器人整体的应力、应变和位移情况,找出薄弱环节,为机器人的进一步优化设计提供理论数据。
2 有限元模型的建立
有限元分析是为了检验机器人的机械结构设计是否满足强度及刚度要求,暂时不考虑机器人的控制,因此只对机器人进行有限元静态分析。
把Pro/E与ANSYS结合使用,利用Pro/E建模快速、准确建模的特长,可以解决ANSYS建模能力不足的问题。首先利用Pro/E软件建立了机器人的机械结构三维实体模型;然后通过软件之间的数据交换接口将三维实体模型导入到ANSYS Workbench中。
在ANSYS Workbench软件进行分析时,必须对模型进行必要的简化,简化成可以分析的模型。因为三维实体模型包含的零部件较多,比较复杂。如果零件不经简化就全部直接导入ANSYS Workbench中进行计算,会增加计算机的计算量并影响计算精度。在保证模型的结构整体质量以及质量分布的前提下,以及在综合考虑机器人机械结构的几何特性与力学性能之后,对整体影响不明显的倒角、圆角、工艺孔等结构进行简化。另外,与销轴采用过盈配合的零件,在ANSYS Workbench中进行form a new part处理,使其成为一个整体部件;采用螺纹进行固定连接的零件同样进行form a new part处理。除此之外,由于夹手部分包含多个气缸,结构较为复杂,如果将夹手导入有限元进行计算,夹手的有限元模型的网格划分将会变得非常复杂,并且延长计算机的运算时间和影响计算精度,因此,用远端载荷代替夹手的自重和物体重力,这个力将作用于夹手与伸缩臂的连接处。简化后的模型如图2所示。

图2 取物机器人简化后模型
在ANSYS Workbench中进行有限元分析之前,首先需要选定材料。机器人的底盘、支架和伸缩臂等均采用铝合金材料,其材料属性如表1所示。选择这样的材料因为密度小,且可根据实际需要调整在上面安装的机构的位置。
根据前面对机器人机械结构的介绍可知,在进行静态分析之前需要在底盘上添加固定约束模拟机器人不行走时的情况。用弹簧代替钢丝绳以实现对平行架的拉动作用。另外,对于其他相对运动关系的关节,根据实际情况均采用Revolute连接。网格的划分对有限元静态分析来说是一项很重要的工作,将对分析结果产生重要的影响。机器人的有限元网格划分的最终效果如图3所示,共计7527单元,39162节点。
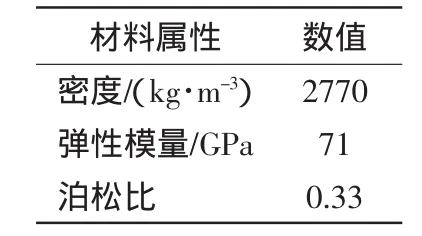
表1 机器人材料属性
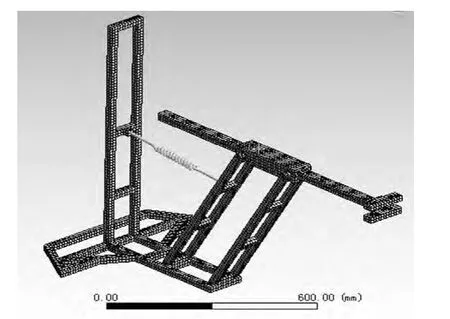
图3 机器人有限元网格划分图
当机器人的平行架前倾到最远的位置且伸缩臂向前伸至最远时,机器人处于最危险的姿态,如图4所示。因此选择研究该姿态在重力、负载作用下的应力、应变和位移情况,进而找到机器人的薄弱环节。
3 有限元静态分析结果
利用ANSYS Workbench计算得到处于危险姿态时机器人的应力、应变和位移云图如图5~图7所示。
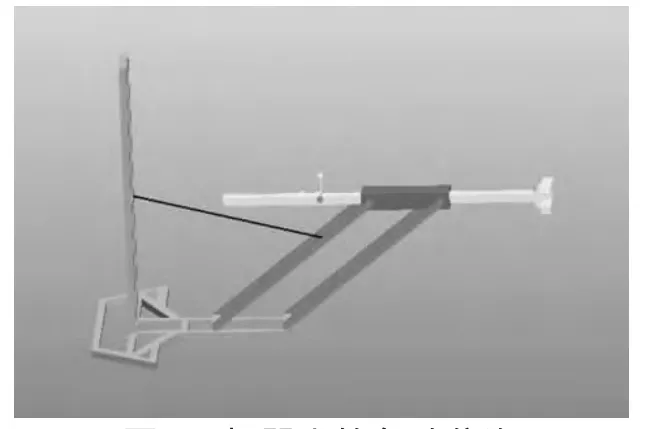
图4 机器人的危险位姿

图5 机器人的应力图
由图5、图6可以看出,最大应力、变形发生在伸缩臂与套筒前端的连接处,最大节点等效变形为3.5858E-5 mm,最大节点等效应力为2.5154 MPa,远远小于材料的屈服极限 120 MPa,强度满足设计要求。同时也可以确定伸缩臂与套筒前段的连接处是薄弱环节,需要进一步的优化和改进。由图7可以看出,取物机器人处于危险姿态,并且在伸缩臂前端施加10 N的力后,最大位移发生在伸缩臂的前端,其值为0.1224 mm,经过试验验证,该值满足设计要求。
4 结论
在确定取物机器人的设计方案后,利用Pro/E软件对取物机器人机械结构进行了实体建模,并且通过ANSYS Workbench软件对其进行了有限元静态分析,得到了机器人的应力、应变和位移图,分析结果表明,在研究过程中所设计的强度与刚度都满足了设计要求,并找到了薄弱环节,为机器人的进一步优化和改进提供了理论依据。此次设计的取物机器人可以用在不适宜人类的工作环境中,或者帮助不方便拿取、搬运物品的老年人及残疾人完成拿取、转移物品的工作。特种机器人在农业、食品加工、建筑、医疗、服务和娱乐等领域发挥着重要的作用,具有着广阔的市场前景。取物机器人的研究也会为人们的生活提供方便与快捷,对人类社会的发展产生影响。

图6 机器人的应变图

图7 机器人的位移图
[1]王树国,付宜利.我国特种机器人发展战略思考[J].自动化学报,2002,28(增刊 1):70-76.
[2]曾攀.有限元分析及应用[M].北京:清华大学出版社,2004.
[3]马睿,胡晓兵,万晓东.基于ANSYS的小型机器人小臂的有限元静态分析[J].机械设计与制造,2012(9):4-6.
[4]杨志敏,周健,李立君,等.基于ANSYS Workbench的采摘机器人臂架模态分析[J].农机化研究,2013(12):56-58.
[5]高耀东,李强,张宝玉,等.ANSYS机械工程应用精华60例[M].北京:电子工业出版社,2012.
猜你喜欢
结构工程师(2022年2期)2022-07-15 02:25:22
新高考·高一数学(2022年3期)2022-04-28 07:02:46
思维与智慧·上半月(2022年4期)2022-04-08 21:24:29
小哥白尼(神奇星球)(2021年4期)2021-07-22 03:17:22
北京航空航天大学学报(2021年6期)2021-07-20 07:24:00
制造技术与机床(2017年10期)2017-11-28 05:23:55
凿岩机械气动工具(2017年3期)2017-11-22 07:21:54
汽车观察(2016年3期)2016-02-28 13:16:36
机电信息(2015年9期)2015-02-27 15:55:56
电子设计工程(2015年15期)2015-02-27 12:07:33