
一种悬挂物兼容飞机航电与武器总线的设计方法
2014-10-11 02:30陈国平张梅梅
教练机 2014年2期
任 丹,陈国平,张梅梅,江 涛,谢 晖
(中航工业洪都,江西南昌330024)
0 引言
多型飞机在设计时,对悬挂物分别采取了航电总线和武器总线的通信方式,使得某通用型悬挂物在不同型号飞机上,或挂装于航电一级总线上,或挂装于武器二级总线上。由于航电总线网络中的终端采用固定通信地址,武器总线网络中的终端采集外挂地址作为通信地址,使悬挂物与飞机的通信存在固定与浮动的通信方式,导致该通用型悬挂物不能兼容挂载多型飞机。本文针对现有情况,提出一种总线识别匹配自适应设计,通过控制运行不同通信模式软件的方法,实现悬挂物在固定、浮动通讯地址以及不同通信协议下均能与飞机正常通信。
1 系统概述
悬挂物主控模块是悬挂物系统正常工作的核心控制部件,用于组织管理悬挂物内部设备,负责与飞机总线通信。悬挂物主控模块与飞机的通信是通过其内部的MBI模块实现。MBI模块采用由软件设置好的固定通信地址实现与飞机航电总线的通信。若要实现悬挂物与飞机武器总线的通信,需对悬挂物主控模块的MBI模块进行改进,使其兼容硬件设置的通信地址,以实现与飞机的通信。
主控模块内部有两套软件,分别是主控模块系统软件和悬挂物系统任务软件。主控模块系统软件是为主控模块所开发的嵌入式实时操作系统及配置的开发环境,提供实时运行软件、软件开发和系统维护平台。悬挂物系统任务软件是为悬挂物主控模块开发实时任务程序,在硬件平台、实时多任务操作系统以及硬件驱动程序的基础上,实现与飞机系统之间的数据交换,控制悬挂物内各设备有序工作,其内部模块见图1。
其中初始化模块负责对各类接口的初始化和工作启动,以及对软件全局数据变量的初始化;软件主控模块负责对25ms周期任务和40ms周期任务的处理,并调用其他模块;GJB289A总线通信模块、RS422总线通信模块、数据分析解算和组织模块、数据记录模块、BIT管理和故障分析组织模块负责悬挂物系统与飞机以及悬挂物系统内部的通信、数据记录、故障分析组织等功能。悬挂物系统任务软件工作流程见图2。
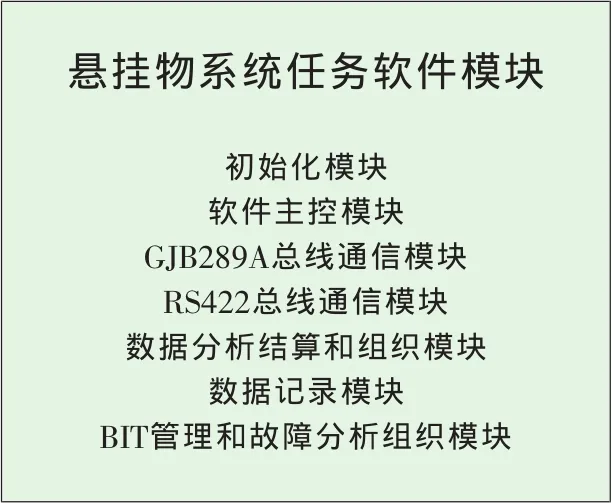
图1 悬挂物系统任务软件模块
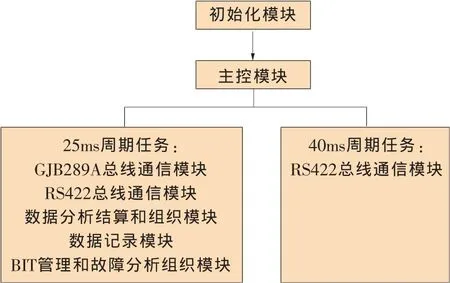
图2 软件工作流程
2 通用性设计方法
悬挂物在两种总线挂装方式下与飞机的通信协议(包括:ICD、通信表等)存在差别[1],使得悬挂物系统任务软件的设计需同时考虑两套通信协议,挂装不同的总线,任务软件执行相应的通信代码。由于任务软件无法识别悬挂物挂装飞机的总线类型,在主控模块面板上增加一路离散量开关,通过硬件产生相应的信号供软件识别,软件根据收到的离散量值,执行对应的通信代码,即可实现悬挂物与两级总线的通信[2]。离散量开关的设计要求可直观看到当前开关的状态,且外部人员不易对开关进行误操作。
为实现悬挂物与飞机两级总线的通信,对悬挂物主控模块机械结构、多路传输总线接口MBI模块和系统任务软件进行设计改进。
2.1 机械结构改进设计
主控模块中包含8路离散量输入,系统只应用了第0、1、2路。在主控模块面板上增加一路开关,用于控制模块中的8路离散量输入中的第3路。所选择的开关为单刀双掷纽子开关,具备防误操作、防水等功能。开关打到上位“固定”位置时,悬挂物挂装航电总线,通信地址采用固定RT地址;开关打到下位“浮动”位置时,悬挂物挂装武器总线,通信地址采用浮动RT地址。
设计改进后的主控模块面板在原主控模块面板的基础上,增加一个离散量开关,其它均不作改动。
2.2 MBI模块设计
为满足悬挂物挂装武器二级总线的通信要求,对原主控模块MBI板增加一种通信地址采集方式。MBI模块根据收到的离散量信号值,选择通信地址采集方式。当悬挂物挂装于航电总线时,MBI模块采用应用软件初始化的固定通信地址实现与飞机航电总线的通信;当悬挂物挂装于武器总线时,MBI模块通过采集悬挂物与飞机接口6路地址线的离散量信号,采用飞机输入的浮动通信地址实现与飞机武器总线的通信。改进后的MBI模块兼容硬件设置通信地址和软件设置通信地址两种方式。
2.3 软件的设计
2.3.1 总线识别匹配自适应设计
为实现悬挂物在两级总线上的正常通信,软件增加一段代码判断通信地址采用固定还是浮动状态,再依此确定悬挂物系统任务软件的工作状态。
输入:主控模块面板上的固定/浮动地址开关,用户在悬挂物系统上电之前通过该开关量进行固定/浮动地址的选择。
输出:软件工作状态判断,当固定/浮动地址开关值为0(低电平)时,软件进入固定地址(航电总线)状态;当固定/浮动地址开关值为1(高电平)时,软件进入浮动地址(武器总线贯标)状态。数据流图见图3。
2.3.2 系统任务软件设计
为实现对新增离散量信号的采集与判断,在原有软件主控模块上增加一路入口函数,以判断当前悬挂物是挂装于航电一级总线还是武器二级总线。由于挂装不同级别的总线,悬挂物与其通信协议(包括ICD、通信表等)存在差别,所以在程序内部编写两路代码,分别适用于不同的协议[3]。当判断挂装的是航电总线,程序进入适用于航电总线通信协议的程序代码,反之进入适用于武器总线通信协议的程序代码。软件处理过程见图4。
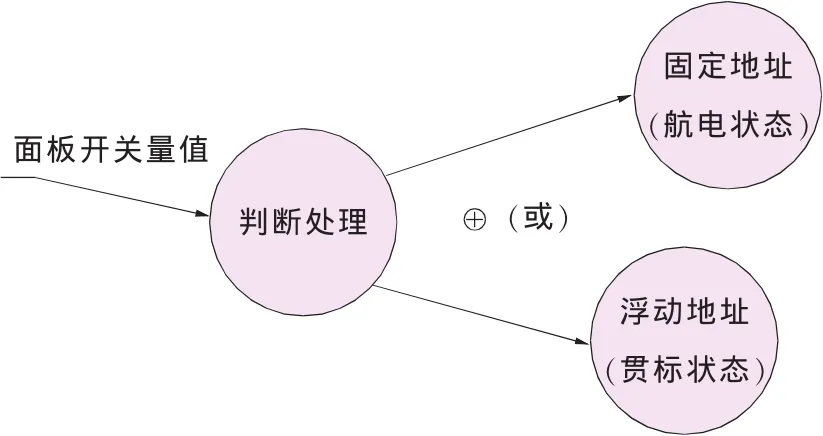
图3 固定/浮动地址数据流图
改进设计后的软件可实现悬挂物与飞机两级总线的正常通信,软件流程见图5。
2.3.3 初始化处理流程优化设计
悬挂物挂装武器二级总线与飞机通信时,系统要求建立通信时间不大于500ms。这就要求悬挂物在上电500ms内,向机上武器总线发出悬挂物描述信息。
悬挂物之前挂装于飞机航电总线,在完成系统自检后,才上报状态信息,建立和飞机的通信。原有软件流程是:引导→自检(BIT)→操作系统→应用软件,其中MBI的初始化和启动包含在应用软件中,通信建立时间远大于500ms。为实现悬挂物挂装武器二级总线时,能够在500ms之内向总线发送悬挂物描述信息,对悬挂物系统任务软件进行了更改。在不影响悬挂物挂航电总线通信的前提下,增加一路软件运行流程,最终将通信建立时间控制在500ms内,满足了系统要求。
软件新增加的初始化流程为:引导→MBI的初始化和启动→BIT→操作系统→应用软件,其中MBI初始化和启动包含了发送悬挂物描述信息。引导程序执行时间最大为30us,MBI初始化时间最大为100ms。更改后的主控模块上电时间流程示意图如图6所示,主控模块上电 (28V有效)到复位结束时间最大为250ms,复位结束后,MBI模块内部CPU进行初始化和自检操作,最大需100ms;系统任务软件对MBI进行初始化和启动最大需100ms,其中包含发送悬挂物描述信息。综上所述,发送悬挂物描述信息最大需要450ms,满足了系统要求。
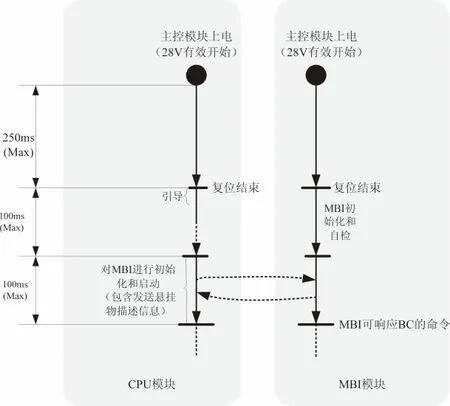
图6 主控模块上电时间流程示意图
软件流程更改后,在上电500ms内,MBI模块具备通信能力,可将悬挂物描述信息发送到总线上。此软件流程只适用于悬挂物配挂武器二级总线,当悬挂物配挂航电总线时,软件流程不作更改。
3 改进后的应用情况
通信的要求,实现了一型悬挂物在多型飞机上的顺利挂装。同时,由于相应飞机无需进行改动,大大减少了挂载悬挂物带来的工作量,并降低了协调复杂度,最大限度的扩大了悬挂物的通用化程度。该方法还可应用于国内同类设备上,提高悬挂物在不同飞机平台挂载的通用性。
悬挂物按上述方法完成设计改进后,已分别与某A型飞机(挂装于航电总线)和某B型飞机(挂装于武器总线)进行了双边联试与对接,并随两型飞机进行多个架次的飞行,飞机与悬挂物通讯均正常。经验证,设计改进后的悬挂物可实现与飞机两级总线的正常通信,满足悬挂物在多型飞机上的挂载要求。
4 结语
本方法通过在悬挂物上增加一路离散量开关控制运行不同通信模式软件的方法,满足了悬挂物在固定、浮动通讯地址以及不同通信协议下均能正常
[1]国防科学技术工业委员会.GJB289A数字式时分制指令/响应型多路传输数据总线[S].北京:国防科学技术工业委员会,1998.
[2]龚德恩.离散控制系统理论引论[M].北京:中国铁道出版社,2003.
[3]齐明侠.工程软件设计[M].东营:中国石油大学出版社,2006.
猜你喜欢
外语与翻译(2022年2期)2022-12-07
铁道通信信号(2020年6期)2020-09-21
水电站设计(2020年4期)2020-07-16
民用飞机设计与研究(2020年1期)2020-05-21
电子制作(2019年7期)2019-04-25
创新作文(1-2年级)(2018年11期)2018-04-24
汽车文摘(2017年9期)2017-12-06
作文世界(小学版)(2017年4期)2017-05-14
专用车与零部件(2016年1期)2016-12-10
军民两用技术与产品(2015年15期)2015-01-10
