
基于PLC的轮轨式提梁机起升机构卷扬机同步性运动控制设计
2014-09-28 01:14文晓娟张君霞
电子器件 2014年1期
文晓娟,李 伟,张君霞
(1.郑州铁路职业技术学院机电工程系,郑州450052;2.郑州轻工业学院机电工程学院,郑州450002)
基于PLC的轮轨式提梁机起升机构卷扬机同步性运动控制设计
文晓娟1,李 伟2*,张君霞1
(1.郑州铁路职业技术学院机电工程系,郑州450052;2.郑州轻工业学院机电工程学院,郑州450002)
为了解决轮轨式提梁机起升机构卷扬机同步性难以实现的问题,针对起升机构工作要求,制定了解决方案,设计了一种基于PLC、变频器、光电编码器的多卷扬机联动电气控制系统,着重阐述了系统的硬件、软件设计及模拟调试。结果表明本控制系统设计合理正确,实现了卷扬机工作的同步性,提高了起升机构工作的可靠性、稳定性。
提梁机;同步性;PLC;变频器;光电编码器
随着现代科技的高速发展,以PLC为控制核心的自动控制系统在各种起重机械中得到广泛应用,其中大部分应用都集中在起重机械基本功能的实现。轮轨式提梁机是我国高速铁路干线建设至关重要的施工设备之一,主要用于高架桥建设中900吨箱梁的吊装。由于提梁机工作现场条件复杂,且起升机构负载较重,在多吊钩联动时难以实现卷扬机的同步性,造成载荷重心偏转失控现象。本设计采用PLC、变频器及光电编码器等自动控制技术,实现了起升机构卷扬机的闭环自动控制,保证了多吊钩联动的同步性,提高了提梁机的工作性能[1-4]。
1 起升机构多吊联动卷扬机同步性控制策略
起升机构多卷扬机同步控制属于交流电动机的闭环控制,又称反馈控制,实质是利用负反馈的作用来减少系统的误差机构。闭环控制系统中,控制信号经计算比较,通过执行部件至被控对象,然后又经过测量部件反馈回来,形成一个闭路传递。偏差信号作用于控制器上,使系统的输出量趋向于给定的数值。其原理框图见图1所示。

图1 按偏差调节的闭环控制系统原理方框图
起升机构采用4台变频器分别驱动4台卷扬机的变频电机,各台变频电机上采用带光电编码器反馈的闭环控制。当产生控制信号时,PLC控制系统结合变频器向交流电动机发出具体信号,使得电动机按照具体频率运转,经由传动系统实现提升机构卷扬机吊钩的运动。在电动机运转过程中,与电动机同轴安装的光电编码器需检测电动机实际转动角位移,经由内部信号处理电路,以脉冲的形式向PLC控制系统反馈电动机运转相关数据,由PLC控制系统对数据进行比较和处理,结合变频器向电动机发出新的运行信号,消除多台电机运行误差,即可实现多台卷扬机的同步运行[5-6]。
2 PLC控制系统硬件设计
2.1 控制系统组成
轮轨式提梁机起升机构PLC控制系统由PLC硬件系统、PLC软件系统、变频器、增量式光电编码器、仪表系统(开关与保护信号)组成,其构成如图2所示。

图2 PLC控制系统框图
系统采用PLC、变频器、增量式光电编码器作为控制核心,对卷扬机电机运转进行控制和调节。当工作现场出现超载、超速、超风速、超限位等情况时,相关传感器提供的保护信号将终止机构的运行[7]。
2.2 硬件配置
(1)PLC采用松下电工的FP0型号,该控制器扫描速度高,可扩展至128位IO点,能满足控制系统所需求的输入、输出点数量;且内置4通道高速计数器,可结合光电编码器满足四台卷扬机联动时对电动机同步性运转的控制;
(2)变频器采用西门子MM440型通用变频器,具有低速高转矩输出、良好的动态特性和过载能力强等特点,特别适合于起重机械。本设计中利用操作面板设置5段固定频率,通过PLC程序控制变频器5、6、7号数字量输入端口的通断情况来输出相应频率驱动电机运行。
(3)增量式光电编码器选用GSX型,在电机运转时输出单路脉冲信号至PLC高速计数器通道,提供电机运行状况的反馈信号[8-9]。
2.3 配置I/O
依据系统的各个控制功能的需求,定义和分配PLC的I/O端子,具体见表1。它们当中输入信号一共有59点,输出信号一共有55点。

表1 输入/输出地址分配
3 PLC控制系统软件设计
3.1 模块功能
依据控制系统硬件设计和起升机构的工作过程,控制系统软件运用结构化和模块化的设计。系统软件中双吊联动与4吊联动运行模块涉及同步性控制。主要内容如下:
(1)双吊联动运行模块:通过调用PLC双吊联动子程序来实现两卷扬机联动,由两个单吊运行程序和同步性控制程序组成。此模块功能为实现双吊联动时两卷扬机电动机的同步、同速运行。
(2)4吊联动运行模块:通过调用PLC4吊联动子程序来实现四卷扬机联动,由4个单吊运行程序和同步性控制程序组成。此模块功能为实现4吊联动时四卷扬机电动机的同步、同速运行。
3.2 程序运行流程图
软件方面采用模块化编程思路,以4吊联动模块为例,确定PLC程序运行流程图,如图3所示。
控制系统工作时,根据PLC程序内容,变频器输出相关频率驱动卷扬机电机运转,与电机同轴相连的光电编码器输出连续脉冲至PLC高速计数器通道,数值保存在PLC相关内部寄存器里。对比4组内部寄存器值来确定最大值以表示目前运行超前的卷扬机电机,通过PLC程序,将其余3台电动机变频器状态调整为输出高一级的电流频率,驱动3台滞后电机更快速度运行。直至4数据寄存器值相等,表示4卷扬机电机保持同步运转,通过程序,将4电机变频器输出频率调整为初始设定值,此时四台卷扬机电机保持同步、同速运转。

图3 4吊联动模块的程序运行流程图
3.3 梯形图
PLC程序控制部分的局部梯形图,如图4所示。
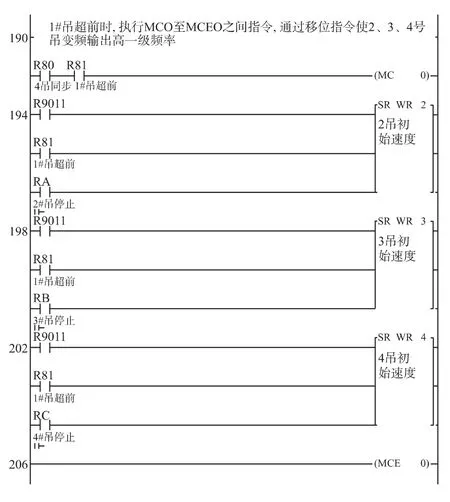
图4 控制系统局部梯形图
4 模拟调试
利用实验室设备对控制系统硬件、软件设计进行模拟调试。由于I/O部分接口众多不便全部显示,现将部分模拟调试面板显示如图5所示。左边部分为部分PLC输入、输出端口,右边为FP0-C32型PLC。硬件接线正确后,利用个人计算机通过RS232数据接口可将程序传输给PLC。

图5 部分模拟调试面板
下面以4吊联动程序为例说明模拟调试过程。模拟调试过程分两种情况:①对PLC高速计数器四通道数据寄存器DT9044、DT9048、DT9104、DT9108写入不同初始值,表示4吊卷扬机电机光电电编码器反馈的脉冲值不同,即4吊不同步,PLC执行程序后通过输出判断是否保持最高设定值所属变频器输出频率不变,而其他变频器以高一级频率输出;②对四通道数据寄存器写入相同初始值,表示4吊同步,通过程序输出判断是否保持4吊变频器原有设定频率不变。即可模拟同步程序是否功能正确。4吊联动模拟调试结果见表2所示。

表2 4吊联动程序模拟调试结果
模拟结果显示:4吊联动子程序的执行符合前述对4吊联动运行的控制要求。
5 结束语
将PLC、变频器和光电编码器技术融合在一起,用于轮轨式提梁机起升机构卷扬机同步性控制系统,简化了电气控制系统,实现了机、电一体化的控制。充分利用PLC硬、软件资源进行模拟调试,结果表明控制系统PLC软、硬件设计正确,程序执行能够满足提梁机起升机构卷扬机同步性的工作需求,可应用于工业现场。本系统解决了原有系统中故障率高、电机同步性难以实现、可靠性低等缺点,具有很大的推广应用价值。
[1]廖腾勇,周文飞.特殊环境下自动收放系统的设计[J].舰船电子工程.2009(09):205-207.
[2]周武.卷扬机电控系统变频改造在我矿的应用[J].中国井矿盐.2012,43(02):35-38.
[3]陈宇,邓子龙,李淑敏.履带起重机桅杆起升机构与变幅卷扬机构同步问题[J].辽宁石油化工大学学报.2012,32(02):58-61.
[4]金旭华.可编程控制器在小型污水处理站的应用[J].电子器件,2000,23(03):224-226.
[5]李斌贵,丁岩,邓唯一.卷扬机的变频操控系统[J].起重运输机械.2010(11)43-44.
[6]王振臣,刘薇,杨丽华等.基于PLC的供热网络远程监控系统研究[J].传感技术学报,2004(03)436-439.
[7]赵燕,传感器原理及应用[M].北京:北京大学出版社,2010.
[8]李鹏飞,聂玲,李文龙.高炉主卷扬PLC——变频器控制系统设计[J].可编程控制器与工厂自动化(PLC FA).2010(02): 33-36,80.
[9]翟磊,许利君,马少群.DLT900型轮胎提梁机起升系统设计[J].建筑机械化.2011,32(11):54-55,69.
W inding Engine for Wheel-Rail Beam Gantry Crane Hoisting Mechanism Based on PLC a Synchronism M otion Control Design
WEN Xiaojuan1,LIWei2*,ZHANG Junxia1
(1.Zhengzhou Railway Vocational and Technical College,Zhengzhou 450052,China; 2.Zhengzhou Light Industry School,Electromechanical Engineering Department,Zhengzhou 450002,China)
In order to solve the problem to complete synchronization of wheel-rail Gantry Crane hoisting mechanism,based on theworking requirementofhoistingmechanism,we design amulti-hoistganged electrical control system comprising PLC,frequency converter,photoelectric encoder.Hardware,software in the design and simulation debugging are expounded in detail.The results of experiment show that the control system design is appropriate,implements the hoistwork of synchronicity,improve the reliability,stability of hoistingmechanism.
beam gantry;synchronism;PLC;frequency converter;photoelectric encoder
10.3969/j.issn.1005-9490.2014.01.030
U445.32;TP273 文献标识码:A 文章编号:1005-9490(2014)01-0127-04
2013-04-21修改日期:2013-05-19
EEACC:7210
文晓娟(1982-),女,讲师,硕士,河南西平县人,郑州铁路职业技术学院机电工程系教师,研究方向为机械研究与设计,PLC系统研究与设计,wenxiaojuan198255@163.com;


张君霞(1979-),女,讲师,硕士,郑州铁路职业技术学院机电工程系教师。研究方向为机械研究与设计,PLC系统研究与设计。

李 伟(1957-),男,教授,硕士,郑州轻工业学院机电工程学院教学副院长,河南省机电产品开发协会理事。研究方向为机械研究与设计,PLC系统研究与设计;
猜你喜欢
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
铁道通信信号(2020年10期)2020-02-07
成都信息工程大学学报(2018年3期)2018-08-29
西安工程大学学报(2016年6期)2017-01-15
铁道通信信号(2016年6期)2016-06-01
电子器件(2015年5期)2015-12-29
中国铁道科学(2015年5期)2015-06-21
医学研究杂志(2015年11期)2015-06-10
医学研究杂志(2015年11期)2015-06-10
电测与仪表(2015年15期)2015-04-12
