
基于myDAQ的直流电机PWM远程控制系统设计
2014-09-26 03:48刘蕴红杨君宝
电子设计工程 2014年2期
刘蕴红,杨君宝
(大连理工大学 电气工程学院,辽宁 大连 116024)
现如今直流电机在各行各业中发挥着越来越重要的作用,因而直流电机的速度控制和测量的重要性也越发的突出。随着科技的快速发展,PWM调速由于其开关频率高、低速运行稳定、动态性能好、效率高等优势已成为电机调速的新方式,并且在电机调速中被普遍运用[1-3]。文献[4-5]中提到的PWM控制信号大多是通过单片机的中断实现,比较占用系统资源,而且容易受到系统中断的影响和干扰,造成系统很不稳定。文中所涉及的PWM信号虽由软件产生,但却是基于硬件的PWM控制,稳定性更好。
NImyDAQ是美国国家仪器有限公司 (NationalInstruments,NI)推出的一个便携式设备,而且配有USB即插即用功能,可针对各种测量进行快速方便的采集与显示,方便了控制信号的输入输出。采用LabVIEW的基于WEB发布工具可以方便的实现网页的远程发布,为远程控制提供了可能。本项目设计的 “基于myDAQ的直流电机PWM远程控制系统设计”可实现随时随地通过网络访问该平台完成对直流电机的各种控制与测量显示。
1 系统的整体设计
NI myDAQ将软件与硬件集合成了一个整体。硬件上myDAQ集成了20路的信号通道,其中包含了8路数字输入输出口、2路差分模拟输入口、2路模拟输出口、以及示波器、数字万用表、函数发生器、各类电源和伯德图分析仪,我们一方面可以方便的利用这些数据通道采集电机的各种状态信息、发送控制命令,另一方面还可以将电机运行结果借助于虚拟仪器形象化的表达出来。在软件上myDAQ的开发采用图形化系统设计软件LabVIEW进行编程设计,利用集成化、形象化、模块化的图形编程方式可以快速方便的编制出实验程序。
基于myDAQ的直流电机PWM远程控制系统采用B/S(Brower/Server)控制模式,B/S模式下,使用 Web浏览器访问服务器,通过网页与实验装置交互。B/S模式具有客户端数量不受限制、软件开发相对简单、系统扩展维护简单等优点[6]。远程客户端是运行在网络终端的用户计算机。因为电机控制的程序都由服务器承载和执行,并且提供了相应的操作界面,任何连接在Internet上的PC机都可以使用浏览器登录到网站进行远程控制,不需要安装专门的客户端软件。需要注意的是客户端计算机LabVIEW Run-Time Engine。此时要求本地服务器端相关的LabVIEW软件及VI程序是打开的。操作者进入运行界面后可对直流电机进行远程控制。当多个客户端同时监控服务器端时,可以多个同时控制,但只能有一个客户端有控制权,其他的需等待释放后获得控制权。本地服务器端是一台装有Web服务器的主机,该主机需要安装LabVIEW及相关驱动的软件。该主机是使远程客户端和本地服务器端进行通信的桥梁。服务器为用户构建一个远程实验交互平台,负责整个系统的任务调度和网络管理等工作。
当该远程控制系统完成后,客户端操作者可以通过任意一台接入因特网的计算机来进入远程控制系统。通过链接进入整个系统的网址,验证操作者的身份后进行操作,可以实现对直流电机的正反转控制、起停控制、转速控制等,同时在客户端界面显示电机的工作运行状态以及PWM控制波形,另外提供摄像头还可以观看现场电机实际运行情况。整个系统的结构如图1所示。
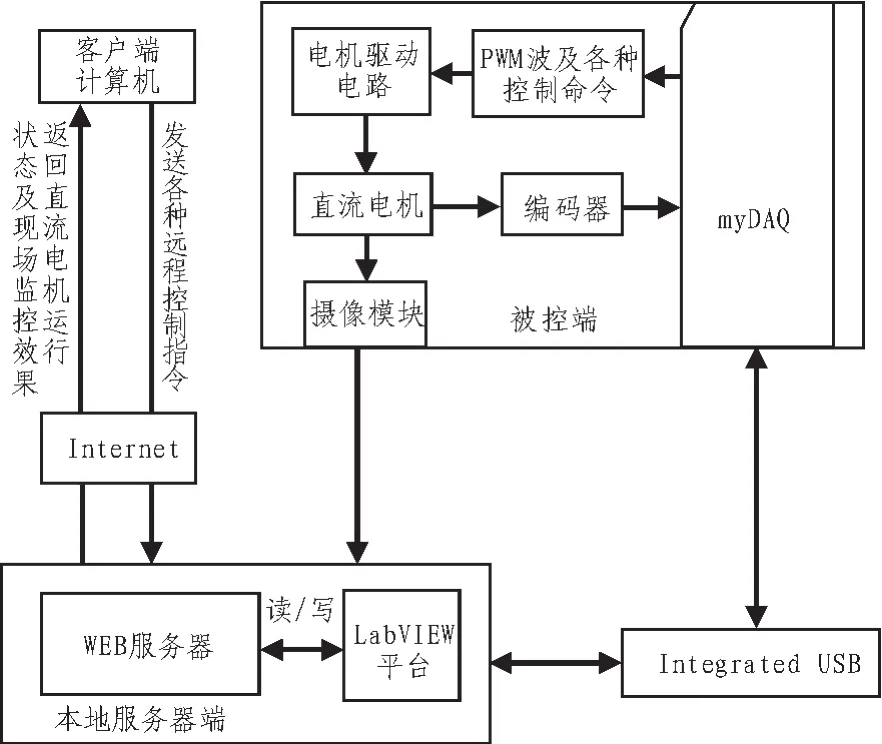
图1 系统结构图Fig.1 System structure diagram
基于以上分析可以看出系统主要有客户端、服务器、被控端3部分组成,但又以被控端的设计为主,其设计主要包含硬件设计和软件设计两部分,下面将针对硬件和软件两部分设计做分别说明。
2 系统的硬件设计
该系统在硬件设计上主要为直流电机的驱动电路设计。需要实现对直流电机的控制功能主要有:电机的启动、停止;电机的换向;电机的PWM调速。这里我们采用美国国家半导体公司 (NS)推出的专用于直流电机驱动的H桥芯片LMD18200。同一芯片上集成有CMOS控制电路和DMOS功率器件,其峰值输出电流高达6 A,连续输出电流达3 A,工作电压高达55 V,具有温度报警和过热与短路保护功能,具有良好的抗干扰性。利用它可以与主处理器、直流电机和增量型编码器构成一个完整的运动控制系统。广泛应用于打印机、机器人和各种自动化控制领域。其控制原理图如图2所示,电机控制指令如表1所示。
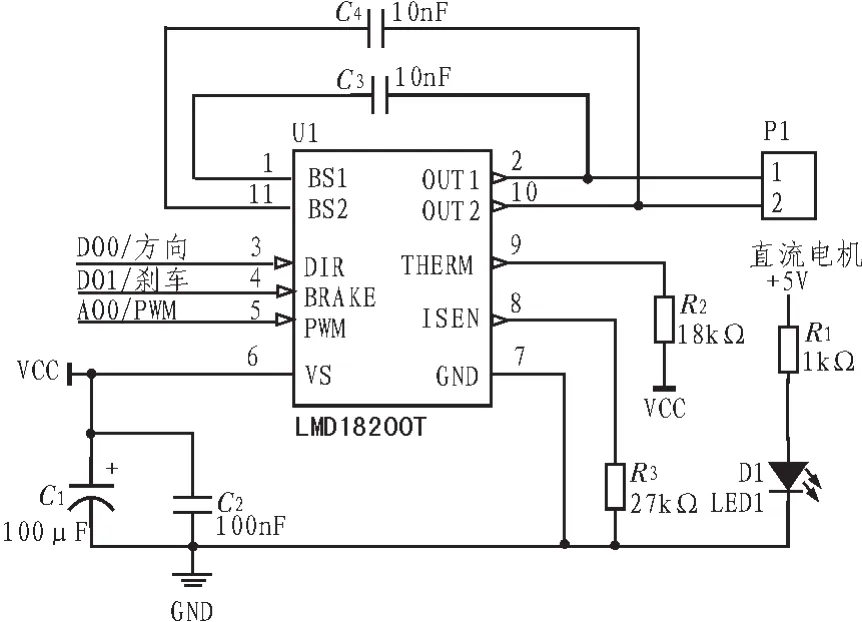
图2 直流电机控制原理图Fig.2 DC motor control principle diagram

表1 电机控制指令表Tab.1 Motor control instruction chart
对于直流电机的速度检测环节采用增量式编码器,型号选择欧姆龙公司的E6B2-CWZ6C旋转增量式编码器,分辨率为1000P/R其电源电压为DC5~24V,消费电流处于80 mA以下,是NPN集电极开路输出信号,输出相有A、B、Z三相。
3 系统的软件设计
3.1 PWM调速原理
脉冲宽度调制(Pulse Width Modulation),简称PWM。在PWM调速系统中,一般可以采用定宽调频、调宽调频、定频调宽3种方法改变控制脉冲的占空比,但是前两种方法在调速时改变了控制脉宽的周期,从而引起控制脉冲频率的改变,当该频率与系统的固有频率接近时将会引起振荡。为避免之,设计采用定频调宽改变占空比的方法来调节直流电动机电枢两端电压。定频调宽法的基本原理是按一个固定频率来接通和断开电源,并根据需要改变一个周期内接通和断开的时间比(占空比)来改变直流电机电枢上电压的占空比,从而改变平均电压,控制电机的转速[7]。在PWM调速系统中,当电机通电时其速度增加,电机断电时其速度减低。只要按照一定的规律改变通、断电的时间,即可使得电枢电压的平均值发生变化,从而控制电机转速。相比于电压调速,采用PWM技术构成的无级调速系统,启停时对直流系统无冲击,精度高,并且具有启动功耗小、运行稳定,易于控制的优点,能保证系统较长时间的运行工作。
3.2 PWM的LabVIEW编程设计
LabVIEW是一款图形化编程工具,编制程序时使用图像化语言,也叫G语言,相比于C语言等文本性编程方法,其编程更加方便快捷,程序可读性强,前面板程序更适于人机交互。本系统涉及到的PWM程序是通过利用LabVIEW基本开发语言配合DAQmx工具包里的各种模块,编制出一个占空比可调的PWM波,并通过myDAQ的模拟输出口AO0输出并送至驱动电路。其PWM程序图如图3所示。
3.3 直流电机速度采集算法
增量式光电编码器是码盘随位置的变化输出一系列的脉冲信号,然后根据位置变化的方向用计数器对脉冲进行加/减计数,以此达到位置检测的目的。它是由光源、透镜、主光栅码盘、鉴向盘、光敏元件和电子线路组成。常用的测速方法有M法和T法两种[8]。M法测速适用于测量高转速,因为对于给定的光电编码器转速越高,计数脉冲越大,误差也就越小。T法测速适用于低速运行的场合。但转速太低,一个编码器输出脉冲的时间太长,时钟脉冲数会超过计数器最大计数值而产生溢出;另外,时间太长也会影响控制的快速性。

图3 PWM程序图Fig.3 PWM program diagram
M法测速又称之为测频法,其测速原理是在规定的检测时间Tc内,对光电编码器输出的脉冲信号计数的测速方法。设脉冲发生器每转一圈发出的脉冲数为P,且在规定的时间Tc(S)内,测得的脉冲数为M1,则电机每分钟转数为:

T法测速又称之为测周法,该测速方法是在一个脉冲周期内对时钟信号脉冲进行计数的方法。用一已知频率为fclk的时钟向一计数器发送脉冲数,设脉冲发生器每转一圈发出的脉冲数为P,测得的脉冲数为M2,则电机每分钟转数为:
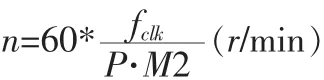
本系统所用到的旋转编码器有5条引线,其中3条脉冲输出线,一条是COMMON端线,1条是电源线,才外还有一根屏蔽线。编码器的A相、B相的相位差为90度,可通过比较A相在前还是B想在前,以判别编码器的正转和反转,由于本系统涉及到的电机为直流减速电机,转速相对较低,因而测速算法采用T法测速。
4 系统测试结果
系统软件部分和硬件部分设计完成后,客户端在远程对系统进行测试,通过链接进入整个系统的网址,验证操作者的身份后进入操作界面,在操作界面上通过方向按钮可实现对电机方向的控制;点击刹车控件实现电机及时刹车;通过调节PWM波的占空比实现对电机转速的调节,当增大PWM波的占空比时电机转速增加,当减小PWM波占空比时电机转速下降;同时在操作界面上还将显示出电机的转速以及PWM控制波形。整个系统的操作控制界面如图4所示。
5 结 论
该远程控制系统用myDAQ作为直流电机调速控制系统的控制核心,以LMD18200作为直流电机驱动电路的核心器件,利用旋转式增量编码器测量直流电机的转速,用PWM脉宽调制方式来控制直流电机的转动速度,上位机通过myDAQ数字输出口给驱动电路发送方向、刹车指令,进而控制直流电机的转向和起停。整个系统结构简单、设置灵活、可靠性高、运行稳定,此外,操作者在远程端还可通过摄像头实时监控现场直流电机的运行情况,及时根据运行状况做出相应调整。
[1]林若波.基于LabVIEW的电机调速数据采集与处理系统[J].测控技术,2012,31(7):16-19.
LIN Ruo-bo.Data acquisition and processing system of motor speed regulating based on LabVIEW[J].Measurement and Control Technology,2012,31(7):16-19.
[2]陈景贤.单片机控制的直流电机PWM调速控制器设计[J].湛江师范学院学报,2008,29(3):123-126.
CHEN Jing-xian.The design of dc motor pwm speed controller based on MCU[J].Journal of Zhanjiang Normal College,2008,29(3):123-126.
[3]刘笑飞,王强,周晶晶.基于单片机的直流电机PWM调速系统[J].科技传播,2010(19):226.
LIU Xiao-fei,WANG Qiang,ZHOU Jing-jing.The design of dc motor pwm speed control system based on MCU[J].Public Communication of Science and Technology,2010(19):226.
[4]彭志永,穆学桢,孙艳华.基于DSP的无刷直流电机控制系统[J].测控技术,2008,27(4):44-46.
PENG Zhi-yong,MU Xue-zhen,SUN Yan-hua.Brushless dc motor control system based on DSP[J].Measurement and Control Technology,2008,27(4):44-46.
[5]茹占军,谢家兴.基于AT89S52单片机直流电机调速系统的设计[J].软件导刊,2010,9(8):106-108.
RU Zhan-jun,XIE Jia-xing.Design of dc motor speed control system based on single-chip AT89S52[J].Software Guide,2010,9(8):106-108.
[6]黄慧萍,孟祥印,肖世德,等.基于B/S模式的步进电机远程控制实验平台[J].实验科学与技术,2010(2):184-186.
HUANG Hui-ping,MENG Xiang-yin,XIAO Shi-de,et al.Remote control lab platform of stepper motor based on B/S mode[J].Experiment Science and Technology,2010 (2):184-186.
[7]郭海英.微机控制PWM直流调速系统的设计[J].测量与控制,2006,35(5):88-90.
GUO Hai-ying.The design of dc motor pwm speed control system based on PC[J].Measurement and Control,2006,35(5):88-90.
[8]潘群,唐土生,朱宇光,等.新型电梯限速器测试台的设计与实现[J].常州工学院学报,2007,20(2):9-14.
PAN Qun,TANG Tu-sheng,ZHU Yu-guang,etc.Design and implementation ofthe new-style elevator’soverspeed governor test stand[J].Journal of Changzhou Insitute of Technology,2007,20(2):9-14.

图4 控制界面图Fig.4 Control interface diagram
猜你喜欢
大电机技术(2022年5期)2022-11-17
网络安全与数据管理(2022年1期)2022-08-29
汽车实用技术(2022年12期)2022-07-05
传媒评论(2019年5期)2019-08-30
成都信息工程大学学报(2018年3期)2018-08-29
传媒评论(2018年4期)2018-06-27
传媒评论(2018年4期)2018-06-27
传媒评论(2018年2期)2018-06-06
电子制作(2017年1期)2017-05-17
西安工程大学学报(2016年6期)2017-01-15
