
改进的WPSS分段时延补偿方法
2014-09-26 09:09:38滕予非丁理杰
电力自动化设备 2014年12期
陈 刚,张 华,程 林,滕予非,丁理杰,张 放
(1.国网四川省电力公司电力科学研究院,四川 成都 610072;2.清华大学 电力系统及发电设备控制和仿真国家重点实验室,北京 100084)
0 引言
电网互联使得电力系统规模越来越大,给电网安全稳定运行带来了一系列新的问题。其中,突出问题之一是振荡频率更低的区间模式振荡。互联系统的弱阻尼区间模式低频振荡问题已经成为西电东送传输极限能力提高的瓶颈。
由于只能以本地信号为反馈输入,本地电力系统稳定器(PSS)对区间模式振荡的抑制效果需要重新评估[1]。以相量测量单元(PMU)测量的远方同步信号为输入的广域电力系统稳定器(WPSS)为抑制区间模式振荡提供了新的途径[2-3]。与此同时,广域信号的引入也给控制器的设计带来了新的内容:在众多类型的广域信息中选取最优的反馈信号;选择最优的控制器落点;控制器的结构与参数设计;广域反馈信号时延的补偿问题等。经过多年的研究,学者们在上述各个方面取得了丰硕的研究成果[4-7]。然而,要实现WPSS的工程应用并不容易,其中最大的挑战来自于实际电力系统中广域反馈时延的补偿问题[8]。
由于很小的时延都会影响阻尼控制的效果,甚至引起系统失稳[9],在控制器设计时必须予以考虑。从20世纪50年代开始,学者们就开始研究时延补偿问题,提出了一系列时延补偿方法。这些方法可分为2类:一是固定补偿法[10-11],通过设计一个固定不变的时延补偿器,实现对固定时延的补偿,尽管这些固定补偿器能够在一定的时延范围提供补偿,但当时延变化过大时可能会失效;二是连续补偿法[12],通过设计大量的离线备选控制器,实现对时延的精确补偿,但很难用于实际电力系统[13]。
在考虑WPSS实际工程应用时,既要考虑从短期来看时延相对比较集中、波动性较小的特性,也要考虑从长期来看时延可能会出现较大随机变化的特点。因此,需要进一步研究时延补偿策略,以解决WPSS在工程现场长期投运时的时延问题。为此,应用WPSS的工程实践中,文献[14]提出了一种基于分段的时延补偿方法。将时延分为若干区间分别设计固定的时延补偿器,根据实测时延自适应选择补偿区间。该方法解决了时延发生较大变化时传统固定时延补偿失效的问题,保证WPSS长期稳定运行;同时避免了连续跟踪时延补偿控制器频繁动作可能导致系统失稳的风险,保证WPSS短期稳定运行。然而,这种方法以控制器动作时刻的时延为选择时延补偿区间的依据,若时延恰好在控制器动作时刻出现抖动,则会导致选择错误的时延补偿区间,影响控制器的效果,并且该方法并未通过大系统仿真的验证。
本文针对文献[14]的不足,提出一种改进的分段时延补偿方法。首先对实际电网中的时延进行实测,实测结果表明时延抖动性很强,若以控制器动作时刻的时延选择补偿区间可能会导致错误的结果,影响系统稳定。为此,提出一种改进的方法,以补偿器动作前一段时间的平均时延作为选择时延补偿区间的依据。两区四机系统上进行的时频域仿真结果验证了所提方法的有效性。实际电网RTDS仿真进一步验证了该方法在大系统中的有效性和可行性。
1 PMU数据时延的组成与实测
1.1 PMU数据时延的组成
在利用广域测量系统(WAMS)进行广域控制时,需要考虑的时延为PMU测量数据从被采集到控制信号进入控制执行器所产生的时延,可用图1表示。
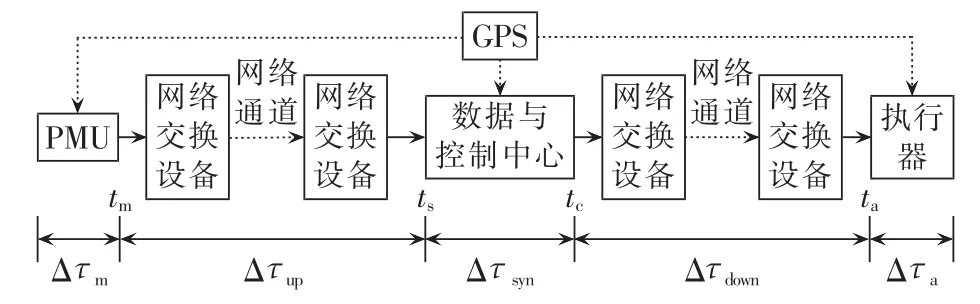
图1 PMU实测数据网络传输时延示意图Fig.1 Schematic diagram of time-delay along PMU data communication path
从图1可以看到,广域信号从被PMU量测到传送至控制执行器产生的时延可表示为:

其中,Δτm为PMU采集并发送数据的时延,包括相量采样、计算、封装产生的时延和PMU发送数据产生的抖动时延。PMU测量数据以数据包的形式发送,先量测的数据要等待后量测的数据,因此,数据发送抖动时延会显著影响同步时延Δτsyn。
Δτup和Δτdown分别为上行通道和下行通道的网络传输时延,视通信协议、通信线路负载情况、传送距离、通信通道带宽、经过路由器的多少等因素的不同而不同,从几十毫秒到几百毫秒不等[15-16]。在WPSS工程应用时,可选择恰当的通信网络通道、提高通道带宽或者使用专用数据通道以降低通道负载等方式降低此部分时延。
Δτsyn为数据与控制中心产生的时延,由于数据中心需要等待所有PMU通道上传的数据到达后方能进行数据时标同步,因此,Δτsyn包括PMU数据同步产生的时延、控制规律计算和发送过程中产生的时延。在WPSS工程应用时,可采用更为高级的数据服务器、实时操作系统以及更为优化的数据处理和控制规律算法降低此部分时延。
Δτa为控制执行器动作时延,包括接收控制命令和将控制命令序列转换为符合控制器接口的模拟信号并作用于控制器产生的时延。该部分时延较固定,通常在5 ms内,可在时延补偿设计时直接考虑。
由于GPS具有精确授时功能,通过比较当前时标与当前到达数据包的时标可得到该阶段数据包产生的时延。PMU在上传每个数据包时都打上时标tm,数据包上传至数据控制中心完成时标同步并获得控制器所需的输入信号后可打上时标ts,将ts和tm进行比较可获得上行通道以及同步时延;控制器完成控制逻辑计算得到控制序列信号,并准备下发时打上时标tc,比较tc和ts可获得控制逻辑计算和控制信号发送时延;控制中心将控制序列信号下发至执行器时,比较执行器时标ta和tc可得控制序列信号在下行通道产生的时延。将各部分时延相加即可得到WPSS闭环反馈回路的完整时延τ:

根据上文分析,Δτm和Δτa比较固定,可在补偿器设计时直接考虑。若WPSS输入为单信号,则tm为该单输入信号的时标;若WPSS输入为组合信号,则tm通常为组合信号中时延最大的单信号的时标。
1.2 PMU数据时延的实测
为了深入研究PMU数据时延的分布特性,为WPSS工程应用提供第一手资料,以贵州电网为例对时延进行初步实测,受测试条件所限,只针对PMU数据包发送抖动时延和上传通道时延进行了测试。
1.2.1 PMU数据包发送抖动时延测试
WPSS在线应用时,需尽可能降低PMU数据的时延,以抖动时延为例,可选择抖动时延较均匀的PMU以减小时延,为此需要对PMU抖动时延进行比较[17]。
实验对象为:北京四方公司生产的CSS-200、CSD-361及中国电科院生产的PAC-2000这3种型号PMU。实验用主机配置为:CPU为双核1.86 GHz,内存3 G。为提高发送数据的效率,PMU采用UDP协议,数据发送间隔为10ms。测试时间长度为200s,即20000个数据包。理想状况下,PMU发出的任意2个相邻的数据包到达主机的时间间隔应该相等,即为10 ms。测试结果如图2所示。
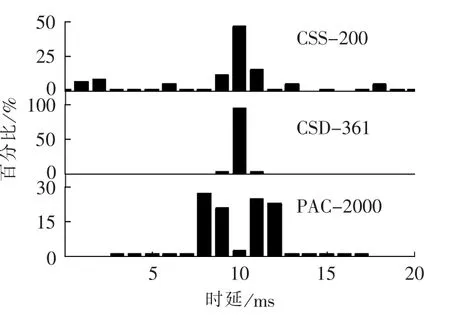
图2 PMU抖动时延分布实测结果Fig.2 Test results of time-delay distribution for different PMU types
从图2可以看到,CSS-200型PMU的抖动时延波动较大,最大达到20 ms,最小小于1 ms,约45%~50%的抖动时延位于9.5~10.5 ms以内;CSD-361型PMU的抖动时延较稳定,约97%的时延位于9.5~10.5 ms以内;PAC-2000型PMU的抖动时延分布范围较大,主要位于7.5~12.5 ms以内。PMU发送数据抖动时延给广域控制输入信号引入了随机性,增加了时延补偿的难度。因此,从工程应用角度,应选择抖动时延较小的PMU,如本测试中的CSD-361型PMU。
1.2.2 PMU数据包上传通道时延测试
为了测试网络通道的时延,以上传通道网络时延为例进行实测,测试对象为贵州电网思林电厂PMU至贵阳PMU主站。
当采用2 Mbit/s专用通道时,传输不同数据包大小对应的时延如图3所示,可以看到,随着上传数据包大小从500字节增加到1500字节,各个数据包产生的时延均值大约从19 ms增加到36 ms,但由于传输通道为专用通信网络,时延相对比较集中。若将数据上传通道改为电力调度通信网公用通道,即PMU数据包与电网其他数据共享网络通道,传输数据包为1500字节时的时延如图4所示,可以看到,当传输通道为公用网络时,数据包的时延均值变化不大,但时延的抖动以及随机性大幅增大,会出现超过100 ms以上的时延。
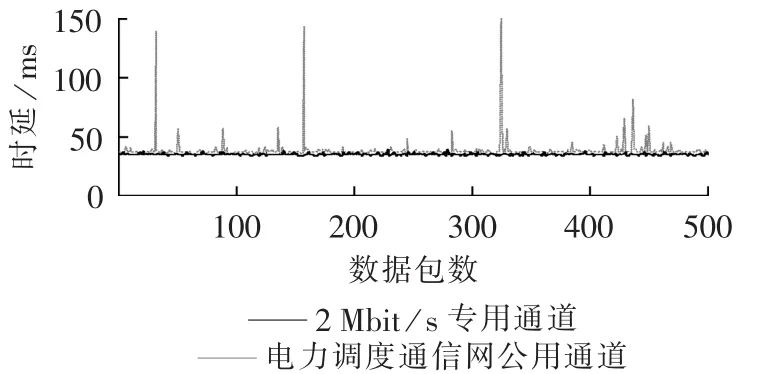
图4 PMU数据包在不同传送通道传输时的时延Fig.4 Time-delay of PMU data communicationfor different channels
本测试只考虑了上行通道时延Δτup,若同时考虑下行通道时延和同步时延等,PMU数据时延会更大,随机性会更明显。因此,从长远来看,随着网络通道及PMU数据包大小的变化,PMU数据时延可能出现较显著的变化,这种较大变化的时延会使固定补偿的时延补偿器不能提供最优的补偿,影响控制效果。
2 改进的WPSS分段时延补偿方法
在WPSS的工程应用研究中,考虑到WPSS长期运行时反馈时延可能出现较大随机分布性的问题,文献[14]提出基于分段的自适应时延补偿方法。
最后,农业污染问题突出。近年来,广西很多农产品数量在全国位居前列,但随之而来的是农业投入品如化肥、农药及农膜增加,农业面源污染问题加剧。从表4可知,近年来,广西农业投入品的使用量都出现不同程度的增加(除柴油下降外),且化肥、农药等利用率低、流失率高,加剧了农业面源的污染程度,导致农业农村绿色发展受制约。
该方法首先对时延进行分段,对于时延τє(0,τM],可按照分段间隔τi=φ0i/(360f)将时延分为m个时延区间,则第m-1个时延区间的上界,即第m个时延区间的下界τm-1为小于τM的最大分界值,可表示为:得到第m个时延区间(τm-1,τM]。其中,φ0为时延分段的相位偏差标准,文献[14]中选择10°;i为时延区间编号;f为所研究模式的振荡频率。

然后,以每个时延区间中点的时延按照固定时延补偿法进行设计,将得到的补偿器作为这一段时延的补偿器。采用如式(4)所示的经典时延补偿器:

其中,时延补偿器参数表示为时延τ的函数,见表1。

表1 时延区间分段补偿Table 1 Interval compensation of time-delay
完成设计后,基于时延分段的补偿器的结构如图5所示。GPS同时给PMU采样数据包、时延测量模块以及WPSS控制服务器提供精确授时信号。PMU实测的带时标同步数据以数据包的形式经由上行网络通道从反馈信号测量点连续地传输至WPSS控制中心,WPSS完成控制序列计算,同时获得上传通道和控制规律计算产生的时延,将此时延与控制规律序列一起打包并重新打上时标,下发至时延补偿器,时延在线测量模块测得下发通道的时延,并结合同时下发的上传通道时延、直接考虑的PMU发送数据时延和执行器动作时延,可获得总的时延,该过程即为式(2)的实现。根据实测的时延判断当前时延位于哪个时延分段区间,进而按照动作规则选择恰当的时延补偿区间,实现时延的在线自适应补偿。
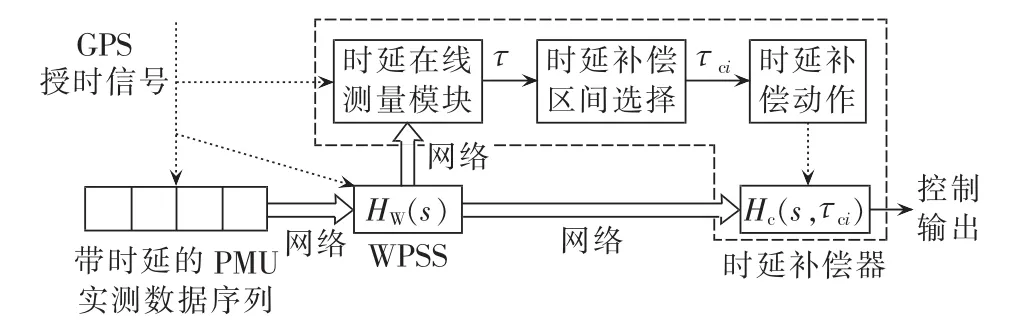
图5 基于时延分段的补偿器结构Fig.5 Architecture of interval time-delay compensator
为了减少时延补偿器测量时延的计算压力,文献[14]仅在每次控制器动作前测量一次时延,即以控制器动作前一时刻的时延为选择补偿区间的依据。然而,根据上文的时延实测结果,在某些情况下时延会出现很严重的抖动或跳变,若恰好以抖动的时延选择补偿区间,会得到错误的结果,甚至会恶化系统阻尼,影响系统稳定。
因此,本文提出以补偿器动作前一段时间Δt内的平均时延τav作为选择下一个控制间隔时延补偿区间的依据,通常Δt≤ΔT,ΔT为控制器动作间隔。即:若补偿器上一个动作时刻为t=Tk,控制器下一动作时刻 t=Tk+ΔT的补偿时延为区间[Tk+ΔT-Δt,Tk+ΔT]的平均时延τav。Δt和ΔT的关系可用图6表示。
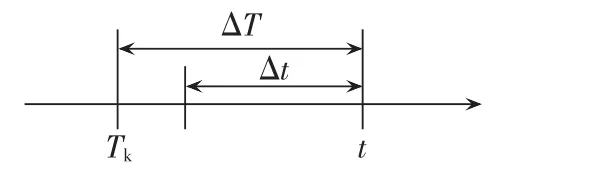
图6 Δt和ΔT的关系示意图Fig.6 Relationship between Δt and ΔT
3 算例分析
3.1 两区四机系统仿真
考虑经典两区四机系统[18],系统参数配置跟文献[14]相同。在G1配置WPSS提高区间模式的阻尼,反馈信号为区间相对角速度Δω12。投入WPSS后,区间模式阻尼由2.18%增大到13.16%。WPSS传递函数可表示为:

当WPSS输入信号有时延时,WPSS控制效果会有一定程度的恶化。对于固定时延,可以设计形如式(4)所示的固定时延补偿环节进行补偿,当时延为100 ms时,补偿器参数为:Kc=0.8533、Tc1=0.1686s、Tc2=0.05 s。由于固定补偿方法对于固定时延补偿的良好效果,为WPSS配置所设计的补偿环节后其控制效果跟理想无时延WPSS几乎完全一致。随着电网中高级应用功能的增多,网络通信负担加重,从长期来看,时延可能会增加。考虑补偿100ms的固定补偿环节,当时延从100ms增加到300ms时系统的动态响应如图7所示。可以看到,随着时延的增大,固定100ms的补偿环节已经不能完全实现对变化后时延的补偿。时延越大,补偿效果越差,当时延达到300ms时,系统接近失去稳定。因此,传统的固定补偿方法并不适合于时延有较大变化的情况。
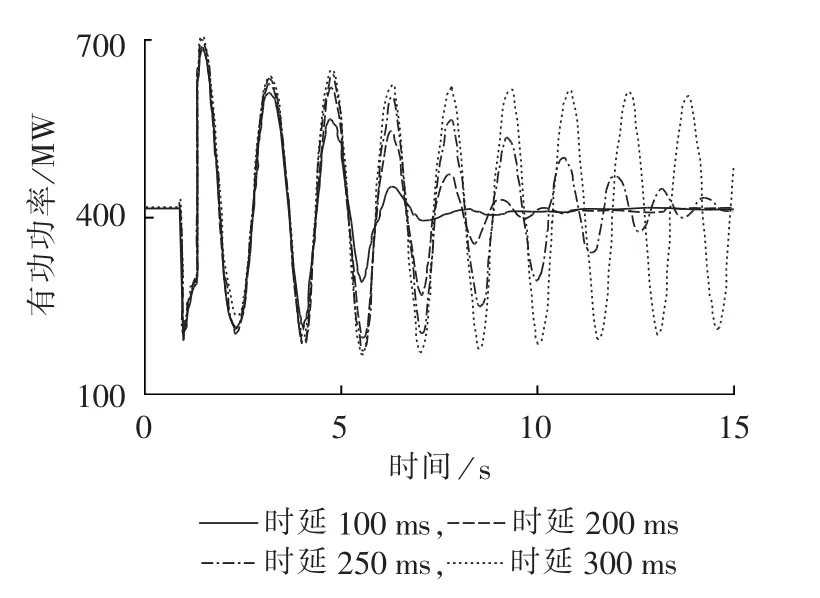
图7 补偿固定为100 ms时不同时延对应的动态响应Fig.7 Dynamic response of fixed 100 ms compensation for different time-delays
本算例目标模式振荡频率为0.615 Hz,设最大可能时延τM为250 ms,按照上文描述的时延分段及时延补偿器设计方法可得时延分段的结果和各区间对应的补偿器参数如表2所示。
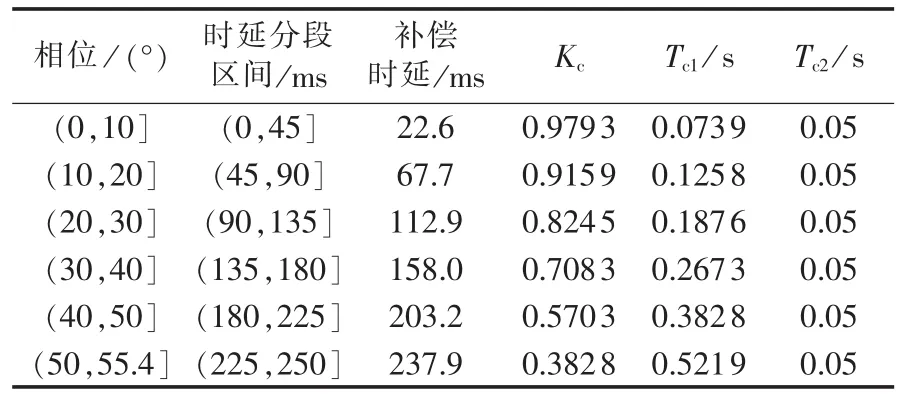
表2 两区四机系统时延分段补偿表Table 2 Interval time-delay compensation for two-area four-machine power system
各区间时延补偿器的频率响应如图8所示(其中时延区间1—6分别对应表2中第2列各分段区间)。从幅频响应可以看到,各区间时延补偿器的幅频响应相交于主导振荡频率0.615 Hz附近,对应的幅频响应大小几乎为0,表明设计的各时延区间的补偿器在主导振荡频率处不改变原WPSS控制输出的大小。从相频响应可以看到,各时延补偿器在主导振荡频率的相位分别为 5°、15°、25°、35°、45°、52.5°左右,约等于各区间补偿时延在主导振荡频率产生的滞后相位。综上可以得到:所设计的各时延补偿器能够补偿各区间补偿时延在主导振荡频率产生的相位滞后,并且不改变WPSS控制输出的大小,表明所设计时延补偿器的有效性。
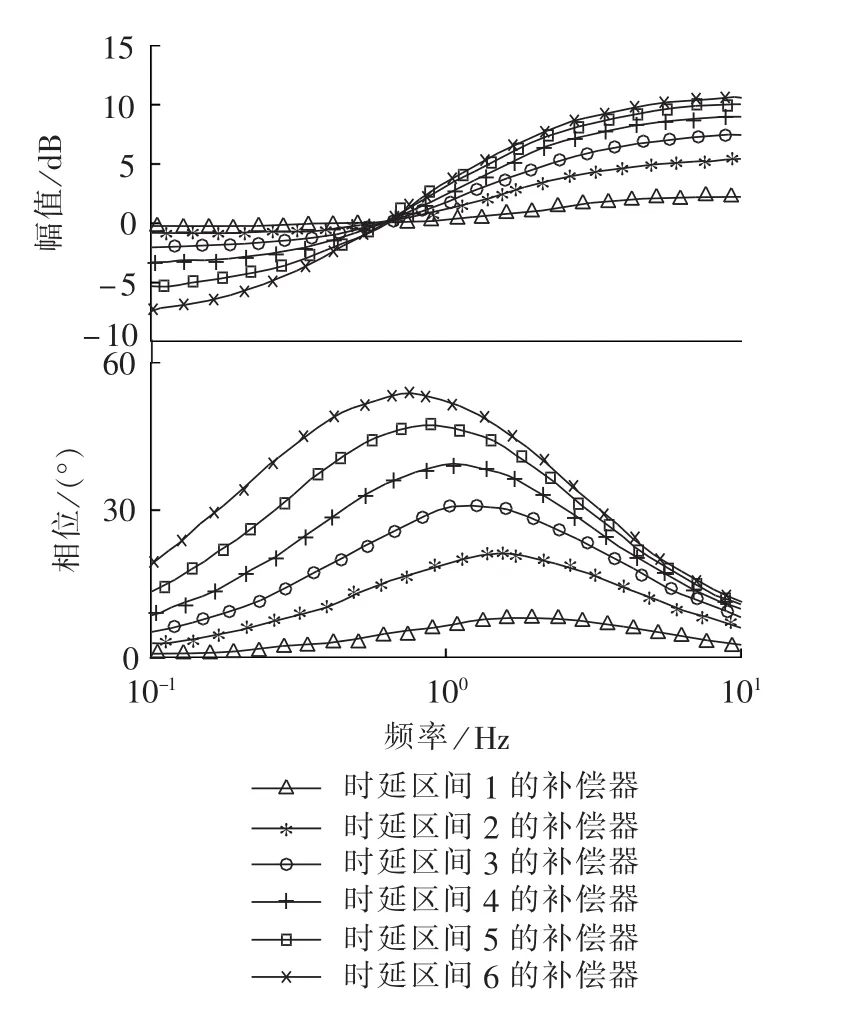
图8 各区间时延补偿器的频率响应对比Fig.8 Comparison of frequency response among different interval time-delay compensators
为模拟时延的随机分布特性,在WPSS输入引入均值变化的正态分布随机时延,如图9中实线所示,时延的均值在图中用虚线表示。
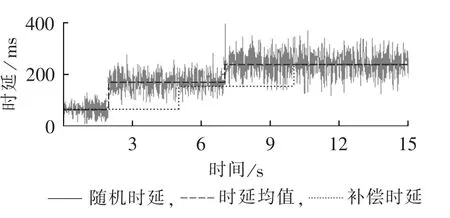
图9 随机时延及改进分段补偿时延(ΔT=5 s)Fig.9 Random time-delay and compensated interval time-delay(ΔT=5 s)
设ΔT=5 s,即时延补偿器每隔5 s进行一次校核;Δt=1 s,即以每次补偿器动作前1 s内的平均时延作为下一次动作时选择时延补偿区间的依据。按照时延补偿动作规则,时延补偿器的补偿时延如图9中点线所示。
将设计的随机时延引入WPSS输入,WPSS开环控制时仿真结果如图10所示。可以看到,引入时延后,WPSS输出控制信号产生了一定的相位滞后。随着正态分布时延均值增大,WPSS输出控制信号滞后角度也增大,即时延引起的相位滞后与时延大小成正比。采用改进时延补偿器进行补偿后,WPSS输出控制信号的相位滞后得到了校正。由于补偿器不能完全跟踪时延的变化,在2~5 s和7~10 s,校正后输出不能完全吻合理想的控制输出。
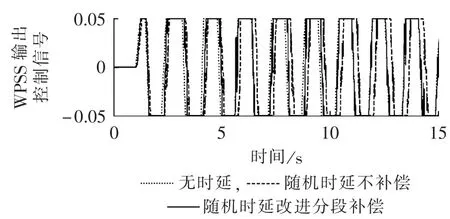
图10 开环仿真时WPSS输出控制信号Fig.10 WPSS output signal of open-loop simulation
图11给出了WPSS闭环控制时,在母线8处施加持续时间为0.4 s的三相短路故障的仿真结果。可以看到,时延的引入使得系统失去稳定;经过补偿后,系统恢复稳定。并且,补偿后振荡较理想无时延WPSS需要多2个周期才得以平息振荡。
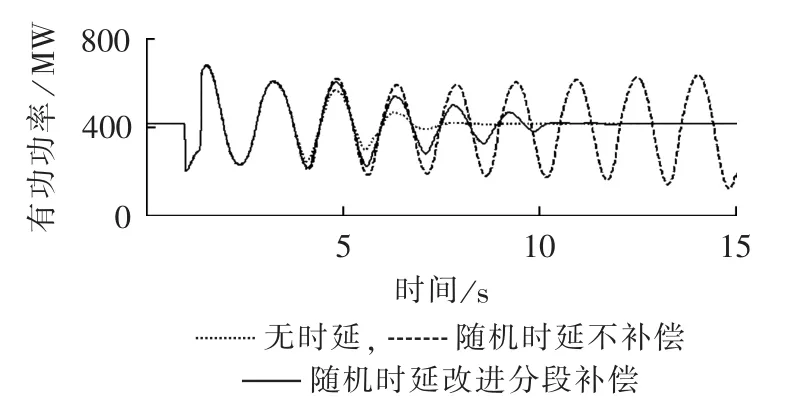
图11 闭环仿真时WPSS控制效果比较(ΔT=5 s)Fig.11 Comparison of WPSS control effect for close-loop simulation(ΔT=5 s)
根据上文分析,当ΔT=5 s、Δt=1 s时,时延补偿器并不能完全跟踪随机时延的变化,导致控制效果与理想WPSS的控制效果有一定差别。为了进一步校验控制器的效果,考虑缩小补偿器的动作间隔,设ΔT=1 s、Δt=1 s。此时,补偿器对变化时延的跟随能力变强,见图12,时延补偿器仅在2~3 s和7~8 s时不能跟踪时延的变化。闭环仿真结果如图13所示,可以看到,补偿后的控制效果明显改善,几乎与理想WPSS控制效果一致。
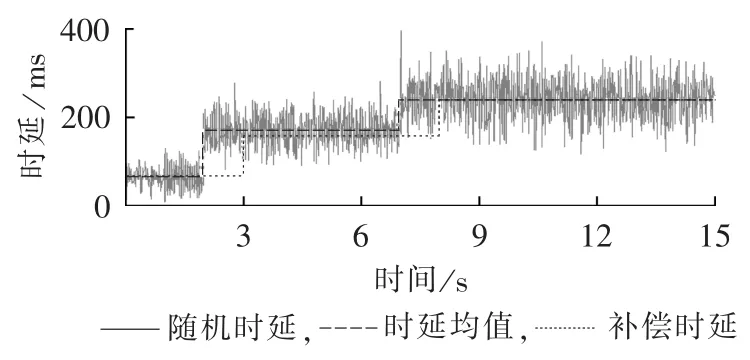
图12 随机时延及改进分段补偿时延(ΔT=1 s)Fig.12 Random time-delay and compensated interval time-delay(ΔT=1 s)
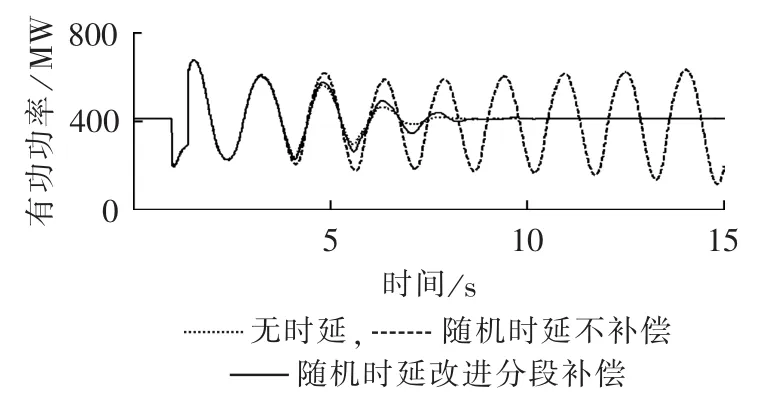
图13 闭环仿真时WPSS控制效果比较(ΔT=1 s)Fig.13 Comparison of WPSS control effect for close-loop simulation(ΔT=1 s)
对比ΔT=5 s和ΔT=1 s的仿真结果,可以看到,补偿器动作间隔的变化会影响控制效果。理论上而言,每接收到一个PMU数据包,就可获得相应时延τ,进而根据该时延选择恰当的时延补偿器区间,此时,时延补偿器根据PMU数据包上传的频率进行自适应调整。然而,本文选择一个远大于PMU数据包上传间隔的时间ΔT为动作间隔进行时延补偿器的自适应调整,有2点原因:若ΔT太小,导致时延补偿器频繁动作,这种频繁的动作会引起控制器持续振荡,当遇到网络阻塞、时延抖动频繁时,甚至可能导致系统失稳;根据时延组成的分析与时延实测结果可知,虽然WAMS时延具有一定的随机分布性,但由于我国电网目前基于WAMS的高级应用较少,电网通信网络大多处于刚升级改造完成阶段,网络负荷较轻,时延相对集中,样本方差较小。因此,时延不会在短时间内发生巨大变化,没有必要过于频繁地调整控制器的时延补偿。未来随着网络负荷的增加,时延随机性增大,可适当减小时延补偿器的动作间隔ΔT。根据如图11所示ΔT为5 s时的仿真结果,纵使时延均值发生如图9所示的剧烈变化,从工程应用的角度考虑,控制效果依然可以接受。因此,推荐ΔT 取较大值,如 5~10 s。
由于本文是在文献[14]基础上进行改进,将本文的补偿方法与文献[14]的方法进行对比,仿真结果如图14和图15所示。从图14可以看到,由于本文采用的随机时延抖动较为明显,以补偿器动作时刻为选择补偿区间的传统分段补偿法明显不能很好地跟踪时延的变化。图15的控制效果进一步表明改进的分段补偿能够在较短时间平息振荡。
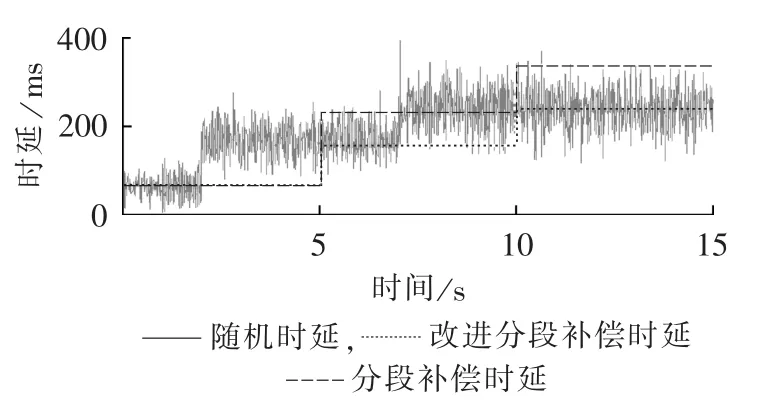
图14 本文方法与文献[14]方法的补偿时延对比(ΔT=5 s)Fig.14 Comparison of compensated time-delay between proposed method and reference[14](ΔT=5 s)

图15 本文方法与传统分段时延补偿法的控制效果对比(ΔT=5 s)Fig.15 Comparison of control effect between proposed and traditional interval compensation methods(ΔT=5 s)
3.2 实际电网仿真
为了验证所提方法在实际电网中的应用效果,在贵州电网RTDS等值模型上进行仿真。系统包括39台发电机、104条母线、174条线路,使用8个Rack资源。将文献[14]提出的四机系统RTDS试验平台改进为贵州电网RTDS试验平台,如图16所示。图中,GTAI和GTAO分别为吉比特模拟输入和输出卡。为跟现场保持一致,PMU选择CSS-200;励磁器选用擎天EXC-9000,改进的分段时延补偿单元集成在网络控制单元中。
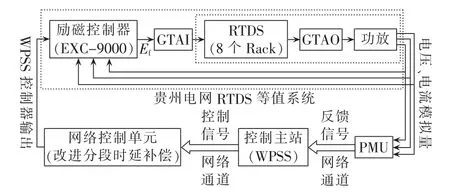
图16 贵州电网RTDS实验硬件系统Fig.16 Hardware system of Guizhou Grid RTDS experiment
贵州电网内部在黔北和黔东地区之间存在一区间振荡模式,最可控和最可观机组分别为思林电厂和乌江新厂。WPSS配置在思林电厂,反馈信号为思林电厂与乌江新厂之间的功角差。
采用均值变化的正态分布随机时延对本文所设计的自适应时延补偿器进行校核。随机时延分为2段,各持续5 s:第1段时延均值为65 ms,标准差为20 ms;第2段时延均值为170 ms,标准差为30 ms。在鸭溪变施加持续时间为0.1 s的三相短路故障校核控制器的效果,RTDS仿真结果如图17所示。可以看到,当采用改进分段时延补偿后,其效果跟无时延WPSS控制时基本一致。
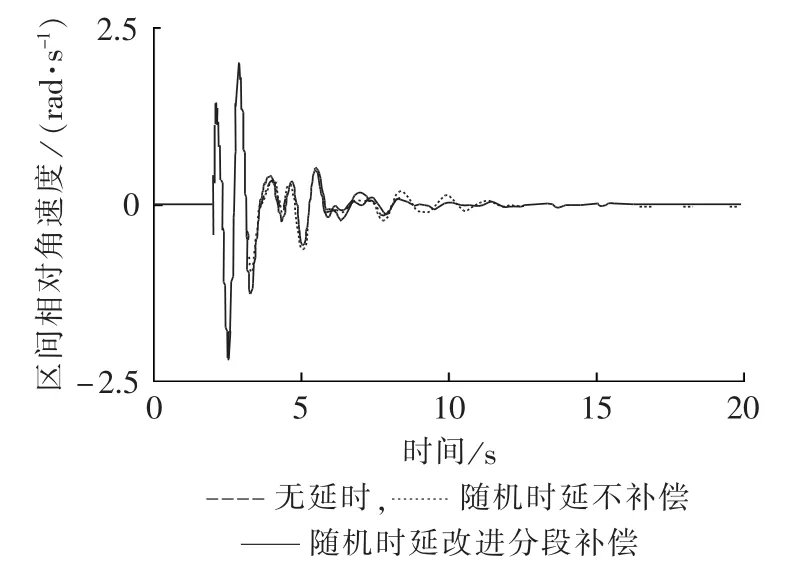
图17 RTDS闭环试验结果Fig.17 Results of RTDS close-loop experiment
4 结论
本文对实际电网中的时延进行了实测,测试结果表明时延具有一定的随机分布特性,时延大小随传输数据包大小以及网络通道环境的变化而变化。并且,时延的抖动性很强,若以控制器动作时刻的时延选择补偿区间可能会导致错误的结果,影响系统稳定。为此,提出一种改进的分段时延补偿方法,以补偿器动作前一段时间的平均时延作为选择时延补偿区间的依据,以更好地发挥WPSS抑制区间功率振荡的功效。
在两区四机系统上进行的时频域对比仿真结果验证了所提方法的有效性与可行性。最后,将所提方法应用于贵州电网RTDS闭环试验,仿真结果进一步验证了所提方法在大系统中应用的可行性和有效性。
猜你喜欢
湖南电力(2021年4期)2021-11-05 06:44:50
数学物理学报(2021年2期)2021-06-09 08:54:44
数学物理学报(2021年1期)2021-03-29 03:14:36
网络安全和信息化(2018年4期)2018-11-09 12:01:54
电子制作(2017年2期)2017-05-17 03:55:29
通信电源技术(2016年1期)2016-04-16 04:57:32
电子设计工程(2015年8期)2015-02-27 12:05:28
中国新通信(2014年11期)2014-09-11 19:27:52
电测与仪表(2014年20期)2014-04-04 11:57:54
华东师范大学学报(自然科学版)(2014年3期)2014-03-11 16:18:15
