港珠澳大桥珠海连接线拱北隧道复杂曲线管幕顶管施工轨迹控制技术
2014-09-26 09:46:54高海东
铁道标准设计 2014年9期
高海东
(中铁十八局集团有限公司,天津 300222)
港珠澳大桥珠海连接线拱北隧道复杂曲线管幕顶管施工轨迹控制技术
高海东
(中铁十八局集团有限公司,天津 300222)
管幕工程是港珠澳大桥珠海连接线拱北隧道的重要组成部分,曲线顶管是本工程核心技术之一,其成功与否将直接关系到项目的成败。管幕下穿拱北口岸,埋深4~5 m,平均长度257.92 m,位于半径890 m圆曲线和缓和曲线组成的组合曲线上,精度要求±50 mm,地表沉降要求小于30 mm,管幕所处地层地质条件复杂,周边环境敏感,人流、车流众多,管节轨迹控制难度大,轨迹精度控制是管幕工程难点之一。从顶管机设备选型、管节长度、F形接头设计、测量控制、动态纠偏、始发接收控制、管节轨迹实际偏差等几个方面介绍管幕轨迹控制技术。
海底隧道;曲线顶管;F形接头;施工轨迹;测设控制
1 工程概况
管幕工程是港珠澳大桥珠海连接线拱北隧道的重要组成部分,曲线顶管是本工程核心技术之一,其成功与否将直接关系到本项目的成败,设计方案几经修改完善,最终确定管幕工程由36根钢管组成,另加1根0号试验管,共37根,平均长度257.92 m,其中壁厚20 mm管节18根,壁厚24 mm管节19根,管节材料为Q235BZ钢,管幕的横断面布置如图1所示。管幕下穿拱北口岸,埋深4~5 m,管径1 620 mm,位于半径890 m圆曲线和缓和曲线组成的组合曲线上。

图1 管幕横断面示意(单位:cm)
管幕所处地层地质条件复杂,周边环境敏感,人流、车流密集,管节轨迹控制难度大,轨迹精度控制是管幕工程难点之一,管幕的轨迹精度偏差要求≤±50 mm,地面沉降要求控制在30 mm以内。目前管幕工程已完成0号、5号、29号管施工,管节轨迹精度偏差控制在要求范围内。
2 管幕轨迹精准控制的影响因素
影响管幕轨迹精度控制的因素主要如下。
(1)管幕平均长度257.92 m,距离长,且位于缓和曲线和半径890 m的圆曲线组成的组合曲线上,线形复杂。
(2)管幕所处地层地质条件复杂,有人工填土、淤泥质土、富水砂层等,且内含混凝土块、漂石等障碍物,施工难度大。
(3)管幕直径达1 620 mm,每节管节质量4.3 t,操作难度大。
(4)管幕埋深较深,承受的水压大(最大水压0.32 MPa),安全风险高。
(5)周边环境敏感,建筑物众多,人流、车流密集,顶管期间要保证拱北口岸正常通关。
3 设备选型
顶管机使用德国海瑞克AVN1200TC泥水平衡顶管机,该顶管机为本工程专门设计,管径1 620 mm,最大顶力6 000 kN,机头后50 m处设中继间,可提供4 500 kN顶力,其主要特点如下。
(1)顶管机分为前后两段铰结,可调间隙100 mm,间隔120°,布置有3个油缸,可依据机头采集到的数据随时进行动态纠偏。
(2)配置全自动UNS导向系统进行精准导向,并按设定的轨迹向前推进。
(3)配置了复合刀盘用以适应不同地层的需要,能处理一般的混凝土块、小块石等障碍物,并可穿过素混凝土墙。
(4)采用先进的泥水处理和自动絮凝系统,环保安全,对地层影响小。
4 总体测量方案
首先对始发端和接收端进行联系测量,统一坐标系统,再通过全站仪,把坐标传递至海瑞克AVN1200TC顶管机自带的UNS导向系统内。顶管过程中,根据机头采集到的数据实时调整顶进方向,通过F形接头实现动态纠偏,然后每20 m左右再进行1次人工测量校核,以人工测量为准。顶管始发和接收阶段要根据顶管机姿态与轨迹线形做好姿态调整。
5 管节及F形接头设计
5.1 管节长度设计
根据《顶管工程施工规范》(DG/TJ09—2049—2008)的要求,偏转角度应≤0.3°,并综合考虑钢板定尺规格、管节焊接工作量、纠偏力作用下的稳定性、施工工艺等因素,确定管节基本长度采用4 m,经验算偏转角度为0.26°,能够满足规范要求,管节长度计算如图2所示。

图2 管节长度计算示意
5.2 F形接头和木质垫块
为保证顶进过程中钢管能够顺利偏转,两节钢管间采用F形接头连接,接头型式如图3所示。另外承插口间设置木质垫块(厚度20 mm,松木或其他材质的复合板均可),其作用是保证在顶进过程中承插口能较好接合并通过内外压力差形成楔形。
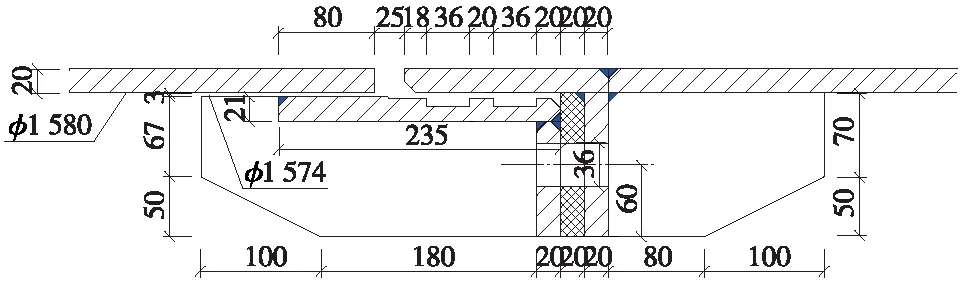
图3 F形接头(单位:mm)
5.3 限位螺栓
为满足线形要求同时保证管节能够形成有效铰接,且不超过外侧最大间隙的要求,采用M33螺栓连接,螺栓最大间隙预留7 mm,顶管结束后拧紧所有螺栓,现场的实际情况如图4所示。

图4 F形接头及木垫块
6 测量控制
管节顶进过程中的导向精度直接决定了管幕轨迹的精度,因此,要高度重视测量控制。测量控制分为3个方面:一是始发端和接收端的联系测量,确保两端采用的坐标在同一坐标系统内;二是顶管机自身的导向,采用海瑞克顶管机配套UNS自动导向系统;三是定期人工复核,修正顶管机UNS系统的姿态控制参数,及时纠偏。
6.1 导线联测与井内联系测量
6.1.1 始发端与接收端导线联测
顶进工作开始前,始发端与接收端所用导线要进行联测,结果符合要求后进行平差计算,按平差后坐标作为计算依据,用来指导后续施工。
6.1.2 井内联系测量
联测后,需要将坐标传递至工作井内。试验管阶段采用后方交会法测量,在井壁上布设4个控制点,置镜于工作平台上,后视4个控制点建站,建站完成后按支导线法向前施测。全面顶管阶段采用井内投点法向管内传递坐标和高程。
6.2 UNS系统导向控制
UNS导向系统为AVN1200TC顶管机配套导向系统,最大偏差为1 mm/m。开始顶进前,把相应管幕对应的轨迹参数输入到UNS系统内,作为初始顶进的参数,其机头尾部有靶心,经靶心把坐标传递至顶管机内,过程中纠偏也以靶心作为传递介质,UNS系统激光靶见图5。

图5 UNS导向系统靶心示意
初始参数设置分3个部分:激光标靶参数设置(ELS)、高度传感器设置(HWL)、激活陀螺仪(GNS)。通过ELS参数设置可以确定机器的状态,与设计值比较,如有偏差进行及时调整;HWL高度传感器实时反应顶进过程中的高程变化,指导操作人员动态调整操作参数;通过GNS系统输入对应管幕对应曲线要素,确定管幕走向,指导顶进作业。
6.3 动态纠偏
顶管过程中,控制室显示屏上能够随时显示顶管机的偏位情况,操作人员要依据屏幕显示的数据及时调整各项参数,并依据显示的机头偏差情况动态调整机头姿态,保证机头偏差控制在50 mm以内,显示屏如图6所示。另外,机头形成轨迹空腔后,后续的管节即按空腔的轨迹前进,即使发生偏位,调整的可能性也很小,因此,确保机头轨迹在偏差允许范围内是轨迹控制的关键。

图6 控制台显示屏
6.4 人工校核
顶管机在UNS导向系统支持下持续向前推进,每顶进20 m左右人工校核1次。人工校核时将全站仪建站于始发端工作平台之上,按建立的支导线向前延伸。测量采用索佳SET1X全站仪,测距精度2 mm+2 ppm、测角精度为1″,高程采用S3水准仪测设,每次复测成果输入UNS系统修正姿态控制参数。
7 始发与接收轨迹控制
7.1 始发控制
始发时,无论是自西向东还是自东向西顶进,均应采用曲线直顶方式,满足3个铰接后再启用机头纠偏功能,本工程取3个管节长度作为直顶段,如图7所示,始发现场如图8所示。这样做的主要原因如下。
(1)由于始发端推进导轨、孔口管长度、井壁混凝土厚度、止水素混凝土墙厚度、顶管机机身长度及机械设备性能的影响,必须采用曲线直顶。
(2)始发时后背墙、推进油缸导轨道、孔口管应位于同一条直线之上,以保证管节居中穿过孔口管,均匀挤压环形止水装置,实现孔口有效止水,否则长距离顶进时易造成止水装置失效。
(3)管幕穿过地连墙、素混凝土墙及始发端土体加固区时不方便纠偏。

图7 始发段3段铰接示意(单位:cm)

图8 始发和接收现场
7.2 接收控制
接收时,为保证机头姿态正确,距离破墙面20 m时,需对机头姿态进行精确调整,以便使机头准确落至接收舱内。姿态调整的参数有横向偏差、高程、里程3项。
8 已完成管节轨迹偏差曲线
0号、5号、29号管节中心点轨迹偏差曲线如图9所示,正值表示向南侧偏移,负值向北侧偏移,从图中可知,3根管幕所有偏差均在±50 mm以内,可满足设计要求。

图9 0号、5号、29号管节轨迹偏差
9 不同地质条件顶进速度对轨迹的影响
从现场顶管的情况来看,淤泥段、黏土段的顶进速度为30~100 mm/min,富水砂层段为200~350 mm/min,推进速度相差较大。推进速度快的地段往往就是地层松软,线形较难控制地段,从0号、5号、29号管节的施工来看,较大偏差出现在富水砂层段。因此,进入松软砂层后要控制推进速度≤200 mm/min,同时人工复核频率调整为1次/8 m。
10 结语
截止2013年12月,拱北隧道已顺利完成0号、5号、29号管节施工,并形成了一套可靠的轨迹控制技术,已顶管节轨迹偏差均在50 mm以内,达到了设计意图,对剩余管幕施工具有重要的指导意义,但仍有一些问题需要解决,如UNS系统与人工校核的匹配性、不同顶管顺序对顶管精度的影响、后顶管对先顶管的轨迹影响、管节适当加长后精度控制方案等尚需在下一阶段顶管时进一步研究和实践。
[1] 杨慧林.北京地区采用新管幕工法修建深埋地铁暗挖车站方案初探[J].铁道标准设计,2012(12):72-77.
[2] 王晓州.丁维利.王庆林.赵永明.初厚之.苏杰.浅埋大断面黄土隧道下既有穿铁路施工技术[J].铁道标准设计,2007(S1):67-71.
[3] 胡友刚.北京地铁10号线大直径管幕穿越京包铁路框架桥施工技术[J].铁道标准设计,2008(12):84-86.
[4] 沈桂平,曹文宏,杨俊龙,等.管幕法综述[J].岩土工程界,2006,9 (2):27-29.
[5] 葛金科.饱和软土地层中管幕法隧道施工方案研究[J].上海公路,2004(1):38-43.
[6] 颜振聪.下穿铁路隧道长大管幕施工精度控制技术[J].福建建筑,2010(2):113-115.
[7] 李耀良,张云海,李伟强.软土地区管幕法工艺研究与应用[J].地下空间与工程学报,2011(10):962-967.
[8] 程勇,刘继国.拱北隧道设计方案[J].公路隧道,2012(3):34-38.
[9] 朱合华,闫治国,李向阳,等.饱和软土地层中管幕法隧道施工风险分析[J].岩石力学与工程学报,2005,24(S2):5549-5554.
[10] 张吉兆,李武.钢管幕顶进技术[J].建筑施工,2006,28( 12):1003-1005.
[11] 余晶,程勇,贾瑞华.港珠澳大桥珠海连接线拱北隧道方案论证[J].现代隧道技术,2012(2):119-125.
[12] 葛金科,杨光辉,田晶.钢管幕顶进高精度方向控制[J].岩土工程界,2005,9(2):37-39.
[13] 袁金荣,陈鸿.利用小口径顶管机建造大断面地下空间的一种新手段-管幕工法[J].地下工程与隧道,2004(1):23-26.
Trajectory Control over Complex Curve Pipe Jacking in Gongbei Tunnel on Zhuhai Macao Bridge Zhuhai Connecting Line
GAO Hai-dong
(China Railway 18thBureau Group Co., Ltd., Tianjin 300222, China)
2013-12-05;
:2013-12-26
高海东(1974—),男,高级工程师,1998年毕业于石家庄铁道学院,工学学士。
1004-2954(2014)09-0106-04
U455.47
:B
10.13238/j.issn.1004-2954.2014.09.026
猜你喜欢
建筑施工(2021年12期)2021-09-14 03:56:10
铁道建筑技术(2021年4期)2021-07-21 05:33:38
科海故事博览(2021年27期)2021-01-02 18:25:03
铁道建筑技术(2019年6期)2019-11-29 07:52:00
中国交通信息化(2019年8期)2019-11-04 00:58:32
建筑科技(2018年6期)2018-08-30 03:41:06
机械管理开发(2018年8期)2018-08-26 10:52:16
中国交通信息化(2018年5期)2018-08-21 03:37:48
森林工程(2018年3期)2018-06-26 03:41:16
中国交通信息化(2018年12期)2018-03-21 05:53:04