
基于多传感器信息融合的移动机器人避障*
2014-09-25 08:09陈绍茹陈奕梅
传感器与微系统 2014年5期
陈绍茹, 陈奕梅
(天津工业大学 电气工程与自动化学院,天津 300387)
0 引 言
良好的避障能力是移动机器人在复杂环境中自主运动的关键之一,需要通过传感器对周围环境信息进行准确的感知并在此基础上决策运动。采用多传感器信息融合的方法,能够减少信息决策的不确定性,提高系统描述环境的准确性和完整性。近年,除了卡尔曼滤波、贝叶斯估计、D-S证据推理等随机类方法,人工神经网络、模糊集合理论等人工智能方法也被用于多传感器信息融合[1]。文献[2,3]利用卡尔曼滤波算法进行多传感器信息融合,其递推特性使系统数据处理不需要大量的数据存储和计算,但是系统模型的线性程度和数据处理不稳定性都会对信息融合过程产生较大影响。文献[4,5]采用基于神经网络的避障方法,神经网络具有大规模并行处理能力,并具备自适应学习功能等优点。但是,神经网络需要大量的样本和隐节点数,利用神经网络实现移动机器人的避障,要大量的计算,这使系统的实时性变差,很容易造成系统对障碍物的错误识别。文献[6,7]采用基于模糊控制的避障方法。移动机器人的运动环境非常复杂,很难建立精确的数学模型来预测障碍物的位置,在这种系统存在不确定信息的情况下,模糊控制的效果常优于常规控制。但在模糊控制中,模糊控制器的设计决定了模糊控制的效果,影响着系统的运算速度和实时性。
本文利用多只超声传感器进行环境信息采集,运用模糊控制的信息融合算法,将前方和左右方向障碍物距离信息的差值作为输入变量,将输出变量直接设为左右轮的速度,并确立了其模糊语言和隶属函数,模拟驾驶者经验得到控制规则,经过模糊推理并解模糊,实现对移动机器人在未知环境下安全避障的有效控制。通过建立移动器人运动学模型并通过仿真实验,验证了该算法的可行性与有效性,最终能实现移动机器人在未知环境下的安全自主避障,表明算法有良好的实时性和鲁棒性。
1 基于模糊逻辑的信息融合
用模糊推理进行信息融合是将多传感器信息融合过程中的不确定性直接表示在推理过程中,先用模糊集和隶属函数描述多传感器所获取的模糊信息,利用隶属函数表示各传感器信息的不确定性,再根据专业知识建立模糊规则,最后利用模糊逻辑算子进行模糊推理,推导出信息融合的最终结果。使用此方法,可以对超声波、红外线等传感器进行信息融合,并将融合结果用于移动机器人定位、避障等[8]。
在应用于多传感器信息融合时,将系统可能决策的集合看作A,将传感器的集合看作B,A和B的关系矩阵RA×n中的元素μij表示由传感器i推断决策为j的可能性,X表示各传感器判断的可信度,经过模糊变换得到的Y就是各决策的可能性。最后,对各可能决策按照一定的准则进行选择,得出最终的结果[9]。
2 移动机器人运动学模型
为了确定移动机器人在环境中的位置,建立全局坐标系XWOWYW和机器人局部参考坐标系XLOLYL。将机器人2个驱动轮轴心连线的中间点OL看作坐标系XLOLYL的原点,相交于点OL的2个垂直轴分别设为XL轴和YL轴。在XWOWYW坐标系下,OL的位置由坐标x和y确定,θ表示坐标系XWOWYW和坐标系XLOLYL之间的角度。机器人的位姿用向量[x,y,θ]T描述。
机器人运动学模型如图1所示。ωr和ωl分别为机器人左、右驱动轮转动的角速度,r为两轮的半径,l为两轮之间的距离,OL点的速度即机器人的线速度为
v=(ωr+ωl)r/2.
(1)
投影到全局坐标系XWOWYW中,即
(2)
(3)
如果移动机器人的角速度为
=r(ωr-ωl)/l.
(4)
那么,机器人的运动方程可表示为
(5)
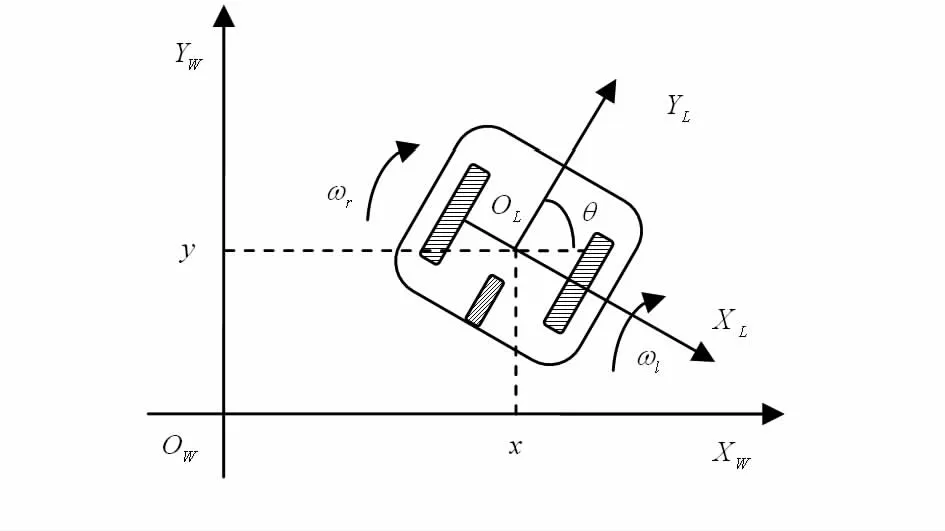
图1 移动机器人运动学模型
3 信息融合避障算法的设计
超声传感器由于处理信息简单快速,价格便宜,而被广泛应用于移动机器人上[10]。实验室IN-RF移动机器人的超声传感器分布排列如图2,最多可以均匀安装12只,每2只传感器之间的夹角为30°,测量距离为41 cm~7 m。采用渡越时间测量方法测量机器人与环境中障碍物的距离信息。现将11,12,1,2,3,4共6个点安装超声传感器,并将6只超声传感器分为3组,分别测量左前方向、正前方、右前方向障碍物的距离信息,每组的距离信息中选较小的数据作为该组的输入。
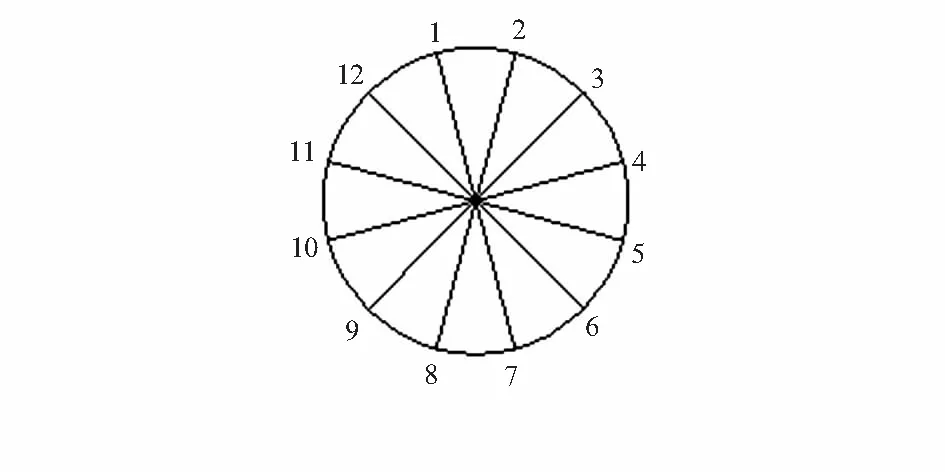
图2 IN-RF移动机器人的超声传感器分布示意图
3.1 确定输入量和输出量
在移动机器人的避障系统设计中,没有根据传统的模糊控制输入变量将左、前、右3个方向的距离信息分别作为输入,而将模糊控制器的输入变量设为3个:正前方障碍物距离信息FD、右前方障碍物距离与左前方障碍物距离的差值RD以及目标点相对于机器人的角度θ。这种设计可减少控制规则的数量,并且在避障的同时保证机器人靠近目标点。
IN-RF为双轮差速移动机器人,通过控制左、右两轮的运动速度,即可控制机器人的速度和转动角度,故控制器的输出变量设为2个:移动机器人左、右轮运动速度vl和vr。避障控制系统如图3所示。
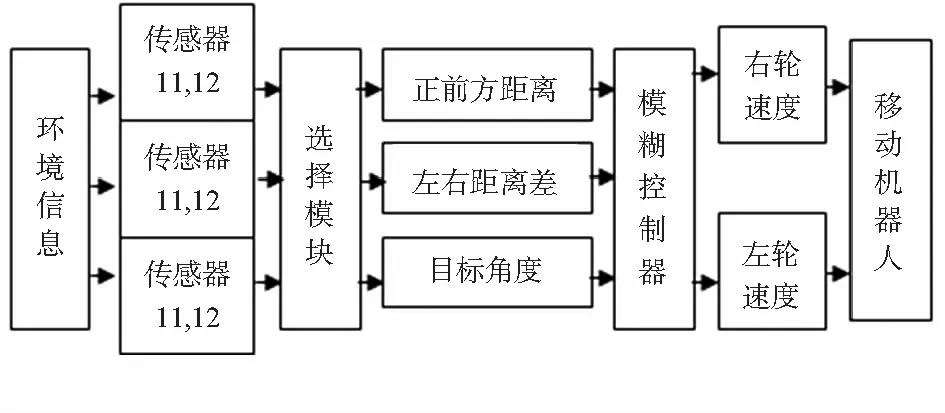
图3 基于信息融合的避障控制系统图
3.2 输入输出变量的模糊语言描述
对输入输出变量进行模糊化,使用连续型论域。
正前方距离值FD(Front Distance)模糊语言变量为{VS,S,M,B,VB}={Very Small,Small,Middle,Big,Very Big},论域为[0,5],表示0~5 m。定义机器人距离障碍物1 m为安全距离。
右前与左前的距离差值D(Difference Distance)的模糊语言变量为{RVB,RB,Z,LB,LVB}={Right Very Big,Right Big,Zero,Left Big,Left Very Big},论域为[-5,5],表示-5~5 m,定义机器人距离行进方向左(右)侧的障碍物近时,RD为正(负)。
目标角度 的模糊语言变量为{L,F,R}={Left,Front,Right},论域为[-60 +60],表示±60°,目标角度在±30°以内时为 F(前方),大于 30°为R(右),小于-30°为L(左)。
左右轮运动速度vl和vr的模糊语言变量为{Slow, Middle,Fast},论域为[0 0.3],表示速度为0~0.3 m/s。各变量的隶属函数如图4所示。

图4 输入输出变量隶属函数图
3.3 建立模糊控制规则
设计避障控制系统,要保证机器人安全避障并且尽量靠近目标,以增强移动机器人的自主性[11]。当目标点位于障碍物左(右)侧时,则机器人左(右)转;当目标点在机器人前方且障碍物距离机器人近时,则机器人根据它左侧和右侧的环境信息来决定是左转还是右转。当左侧障碍物距离大于右侧障碍物距离时,机器人选择向左转;反之,向右转。机器人的转向是以左右轮速度的改变来控制的,速度的改变还能有效控制机器人运动的时效性。
表1为列出的部分模糊控制规则,以供参考。
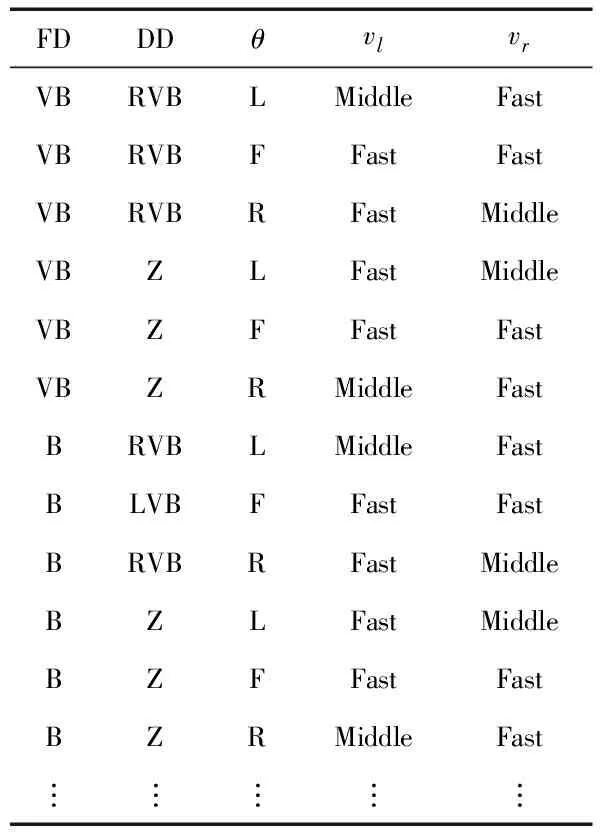
表1 模糊控制规则表
根据上面所确定的输入输出集,模糊规则的一般形式可以if( 条件) then(结果)描述
if FD is VB and DD is RVB andθis L thenviis Middle andvris Fast.
3.4 解模糊
解模糊的过程是把推理系统输出的模糊集合转化为精确输出,用来控制或驱动执行机构,也就是把上面推理合成得到的左右轮运动速度模糊集合转为一个精确值来控制机器人的运动。本文采用的重心法是所有解模糊化方法中最合理和引人关注的方法。该方法的数学表达式为

(6)
(7)

4 仿真实验
根据移动机器人的运动模型和在FuzzyLogic工具箱中建立的模糊推理系统,在Matlab中利用Simulink建立系统仿真模型,并利用GUIDE设计了移动机器人仿真界面。首先对环境信息进行设置,将移动机器人运动区域设为800 cm×850 cm,移动机器人的起点和终点位置可以任意设置,障碍物的大小、形状和位置也可以任意设置,这样可以更好地检验算法的正确性和可靠性。仿真结果如图5所示。

图5 仿真结果
由图5可以看出:在圆形、矩形障碍物障碍物、以及障碍物较多和较少等多种情况下,机器人都可以成功避障。从实验中的移动轨迹可看出:移动机器人运行轨迹连续且平滑,表现出比较好的一致性、连续性和稳定性。
5 结 论
利用多传感器信息融合对移动机器人的避障研究,避免了对环境的准确建模、移动机器人的定位精度敏感以及对环境信息的依赖性强等缺点。本文采用了的模糊控制算法对移动机器人进行控制,这种算法对移动机器人的运行环境、障碍物的形状及其个数几乎没有什么限制,能在情况很复杂的未知环境里安全运行。通过对输入量的优化,简化模糊控制规则,并且输出量设为速度的控制使机器人比以前只对转角控制进行避障节省时间,具有良好的时效性。
参考文献:
[1] 马 平,吕 锋,杜海莲.多传感器信息融合基本原理及应用[J].控制工程,2006,13(1):48-51.
[2] 迟洪鹏,战 凯,郭 鑫.基于多传感器信息融合的地下自主铲运机的定位技术[J].有色金属,2009(4):148-152.
[3] Adam A,Rivlin E,Rotstein H.Fusion of fixation and odometry for vehicle navigation[C]∥Proc IEEE Int’l Conf on Robotics and Automation,Detroit,Michigan,1999:1638-1643.
[4] 李 强,杨晓京,魏 岚.基于神经网络信息融合的智能机器人[J].机电工程技术,2006,35(6):72-74.
[5] Xu Kejun,Tong Libiao,Mei Tao.Feature-level data fusion of a robotic multisensor gripper using ANN[C]∥Proceeding of the SPIE,2001:292-295.
[6] 刘喜昂,周志字.移动机器人的超声模糊避障算法[J].微计算机信息,2004,20(1):31-32.
[7] Homayoun Seraji,Ayanna Howard.Behavior-based robot navigation on challenging terrain: A fuzzy logic approach[J].IEEE Transactions on Robotics and Automation,2002,18(3):308-321.
[8] Kinoshita G,Ikhsan Y,Osumi Y.Object location based on sensor fusion of vision tactual sensing[J].Advanced Robotics,2000,13(6):633-646.
[9] 罗志增,蒋静坪.基于D-S理论的多信息融合方法及应用[J].电子学报,1999,27(9):100-102.
[10] 段丙涛,杨 平,翟志敏.基于声纳环传感器的机器人避障研究[J].传感器与微系统,2012,31(2):64-66.
[11] 杨晶东,洪炳熔,朴松昊.基于模糊行为融合的移动机器人避障算法[J].华中科技大学学报,2008(36):310-313.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
制造技术与机床(2017年3期)2017-06-23
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
