新型故障监测传感器在机载云台电动舵机中的应用*
2014-09-25 08:19:26田乾乾范海峰
传感器与微系统 2014年9期
田乾乾, 范海峰
(1.中国民航大学,天津 300300; 2.天津航天机电设备研究所,天津 300301)
0 引 言
小型无人直升机凭借自身的特点和自主飞行能力,在某些场合已经取代了固定翼飞机和载人飞机,得到了广泛的应用[1]。由于其飞行过程是在电子设备的全程干预下完成,不需要飞行员的参与,所以,也可以应用到一些环境较为恶劣的场合,例如:勘探、航拍、巡逻等[2]。
近几年来,随着导航与制导技术、自动化技术以及微电子技术的长足发展,无人机的应用领域已经从单纯的军事用途朝多样化的民用领域发展,无论是在军事领域还是在民用领域,无人机在执行任务的过程中,往往需要其对一个目标进行连续的跟踪,并将收集到的有价值信息实时地回传给地面控制中心,然后控制中心将信息进行处理,根据处理后的数据得出无人机下一步的飞行路径,并实时控制无人机的姿态。
在对目标进行定位与跟踪的过程中,要求机载的摄像头或其他设备能够实时地根据目标位置的移动进行快速随动,这样才能保证得到的都是有价值的信息,机载云台作为跟踪设备的操作平台,可靠性和稳定性的要求很高,一旦发生故障将造成跟踪设备不能对目标随动,从而造成整个系统的失灵。
1 电动舵机
机载云台作为无人机上搭载的各种设备的操作与安装平台,具有水平和垂直回转的功能,而电动舵机作为整个系统的核心部件,可靠性的高低直接关系到整个系统的性能。
如图1所示为机载云台的结构框图,电动舵机是飞行控制系统的执行机构,作为整个系统的核心部件,它根据飞控计算机的输出指令,对飞机的各操纵面进行直接或间接控制[1],其由控制器、驱动器和电动机组成。现阶段电动舵机主要采用无刷直流电机,无刷直流电机由高性能的稀土永磁材料制造,具有高速度、高动态响应、高热容量及高可靠性的优点[2],同时其还具有低噪声、长寿命的特点,是一种发展潜力巨大的新型电机,目前已应用于多种领域,尤其在航空、航天中应用广泛。
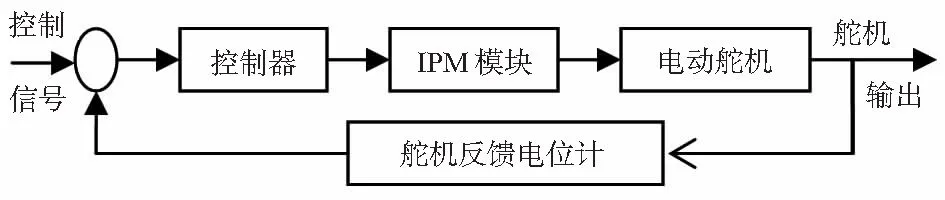
图1 机载云台结构框图
目前在飞控系统中,电动式伺服舵机发展迅速,但是由于结构和部件复杂,与传统的单纯机械式舵机相比,可靠性略低,当电路发生故障没有及时排除时,将会影响舵机的使用性能,危害航空安全[1],因此,设计一个故障监测系统对舵机的故障进行及时定位、排除是非常有必要的。
2 光生伏打隔离器PVI1050NS
无人机电动舵机驱动系统主要包括功率驱动系统和逆变系统两部分,功率驱动系统发生故障的可能性较小,而且即使发生故障,也很难进行人为干预,而逆变系统如果发生故障则会导致整个系统停摆[3]。例如:逆变系统某一桥臂发生导通短路时,随着控制信号001—010—011—100—101—110六种状态的循环,将会出现直通的危险状况,相当于母线电压直接加在一根导线上,电流瞬间急剧增大,烧毁元器件[4],此时应立即切断该故障通道。
为了避免这种直通危险的发生,本文将光生伏打隔离器PVI1050NS应用到无刷直流电动机的驱动电路中。PVI的核心是长3 mm,宽不到0.5 mm的硅光电池(通常称为光生伏打电池)小阵列(串联以获得足够的输出电压)[5],其位置距高输出稳定性的砷铝化镓发光二极管约1 mm[6],并塑压在透明塑料光学腔体内,可以将LED的红外能量高效地传递到光生伏打电池组[7],这种光生伏打隔离器采用标准8引脚DIP封装。
PVI1050NS能产生大约5 V电压,并且具有一定的电流产生能力[8]。输入电流I经LED转换后,变为辐射红外光,红外光对准光电池的表面后,将产生与入射能量呈正比的电流I[9]。
民生水利发展又是一个长期的过程,需要不断把握人民群众的新期盼,开辟兴水惠民新领域。会议指出,要努力在抓好小型农田水利重点县建设、实施坡耕地综合整治、开展蓄滞洪区安全建设、搞好病险水闸除险加固、开展农村水环境整治等五个方面实现突破。
将物理、电气以及机械结构考虑进去,计算得出电流传输比约为1000∶1(近似线性的)[7]。因此,为了获得足够的输出电压,须将多个光电池串联,如10个光电池串联可以获得约6 V左右的输出电压,在本设计中,相当于将PVI的两个独立的输出串联一起,达到12 V的驱动能力。
图2中,实线为输出特性,虚线为PVI器件的输出短路特性。PVI1050NS的输出特性,从图2可以看出,纵坐标为输出的电压,横坐标为输入的电流,输出端的负载电阻作为控制参数[10]。可以看到,随着输入电流的不断增加,输出电压在输入电流增加到约2~4 mA后接近恒流源的特性[7]。输出电压随输出负载的电阻值降低而不断减小,输出开路状态下的输出电压最高[11]。
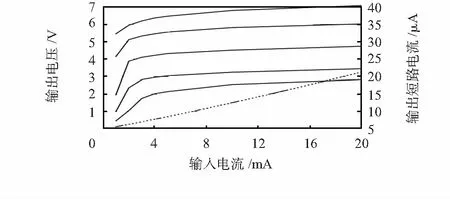
图2 PVI输出特性
从图中输出电压与输出端负载电阻的关系看,PVI器件适用于为高输入阻抗的电路提供隔离的耦合信号与电能,特别适合于驱动MOSFET,IGBT等绝缘栅功率半导体器件[12]。
3 系统设计
3.1 主电路设计
在无刷直流电动机的全桥式驱动电路中,逆变桥主电路有6只功率开关器件(功率MOSFET或IGBT),如图3所示,若每只功率MOSFET都用1个独立的驱动电路来驱动,至少需6个驱动电路,这样需要配备4个相互独立的直流电源来给驱动电路供电,这样不但使系统的硬件结构变得复杂,而且可靠性也下降[4]。

图3 主回路单元
IR公司的IR2136S系列是功率MOSFET和IGBT的专用栅极驱动集成电路,它的内部采用自举技术[9,13],仅需一个直流电源就可以解决所有问题。
3.2 功率驱动电路设计
IR2136S芯片具有完备的保护功能,可大大提高系统的集成度、可靠性,并可缩小电路板的尺寸。IR2136S集成电路的性能较光耦合器或变压器栅极驱动方式优越,它的死区时间低至250 ns[13]。典型接通时间为250 ns,关断时间为180 ns[9],可满足无刷直流电动机高频工作驱动的要求。
IR2136S具有如下特点:
1)有浮地输出,可直接驱动600 V高压系统;
2)能够输出10~20 V的驱动信号;
3)具有欠压保护和过流保护功能;
4)逻辑输入和CMOS,LSTTL输出兼容[5]。
3.3 故障保护电路设计
当上下桥臂发生直通时,相当于电源的正负极相短接,这时候就会有很大的电流流过采样电阻[7],经过电路中的过流检测电路,将电流信号转换为电压信号,这时电路中的功率驱动芯片IR2136S的ITRIP引脚变为高电平。
如图4所示,ITRIP引脚是一个过流保护引脚,正常状态下为低电平,当引脚电平变为高时,芯片的FAULT引脚由正常的高电平变为低电平,一旦FAULT引脚变为低电平,当FAULT变为低电平时,IR2136S自动截断所有输出,保护后续电路。

图4 输入输出时序图
同时电路的二极管截止, PVI1050NS输入切断,输出因此也切断,将电源的正极切断,起到双重保护电路的作用,过流保护原理图如图5所示。
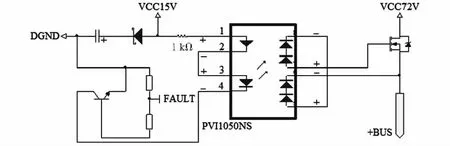
图5 过流保护
如图6所示,分别将电路中的其他故障信号,如过压、欠压及过温等保护信号相与后分别输入到控制器的功率保护中断引脚FAULT中,这样无论电路中哪一故障信号使能,系统都能对故障进行定位与诊断。

图6 其他故障信号保护
4 实验验证
设计完成的电动舵机驱动器及其故障监测系统结构框图如图7所示,主要包括控制单元、驱动单元、无刷直流电动机及仿真器等结构。
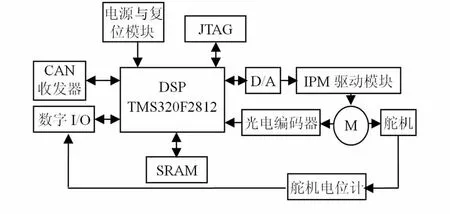
图7 电动舵机驱动器及其故障监测系统结构框图
实验对象(无刷直流电动机)的主要参数:供电电压72 V;功率1 500 W;空载转速8 600 r/min;额定转速7 600 r/min;额定转矩1.8 N·m。
4.1 开环机械特性与电流测试
通过研制的电动舵机驱动器来控制无刷直流电动机,使用转矩测量仪对电动机进行加载测试,然后利用故障监测系统进行电流值测量。
首先在系统开环情况下进行机械特性实验。给定额定电压72 V,首先让电动机空载起动,记录下电动机的转速,然后逐步增加电动机的转矩负载,实验结果如表1。
从表1可以看出:实测机械特性的硬度稍低于FEA仿真理论值的硬度,图8、图9能更直观地反映这一点。
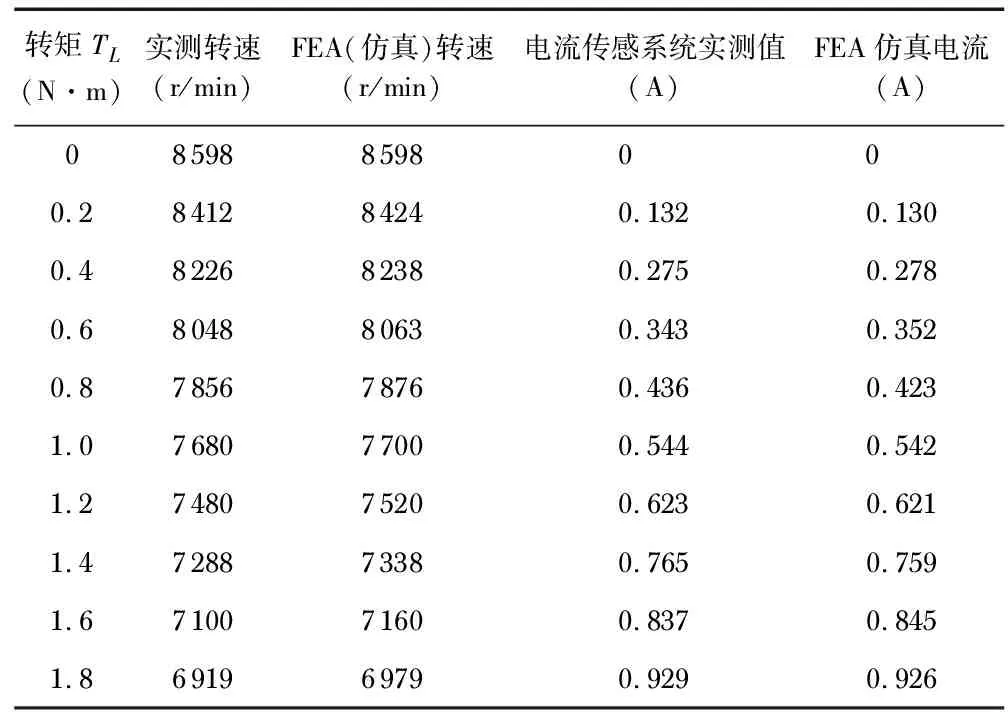
表1 实验数据
4.2 额定工况测试与电流测试
用电动舵机驱动器来控制无刷直流电动机,系统额定工况下(额定转速7 600 r/min;额定转矩1.8 N·m)的响应特性如图8、图9。
实验结论:
图8所示为B,C相的相电压曲线图,从图中可以看出:B相(浅黑色)相电压值约为36 V,C相(白色)相电压,电压值也约为36 V,黑色线为B,C线电压,值为B,C相电压差,从图中可以看出:线电压约为额定电压72 V。

图8 相电压
图9所示为相电流曲线图,为电机的C相相电流,从图中可以看出:电机在额定工况下的电流可达1 A左右,与前面的实验数据吻合,动态特性良好。
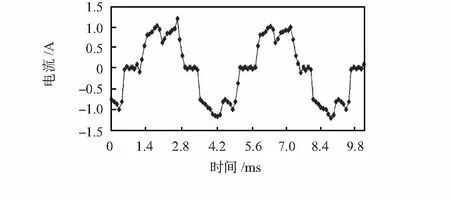
图9 相电流
5 结 论
结合光生伏打隔离器PVI1050NS的技术特点,设计并实现了一种新型故障监测传感器,该监测传感器能实时监测电动舵机驱动电路中的过流、过压、过温等故障信号。通过对该故障信号的处理,可以判断驱动电路的故障位置,迅速进行定位并进行故障处理,保障了电动舵机运行的可靠性与安全性。实验结果表明:该故障监测传感器具有较高的灵敏度,大大提高了系统的可靠性。
参考文献:
[1] 王季秩,曲家骐.执行机构[M].2版.北京:机械工业出版社,1999:55-80.
[2] 郑 吉,王学普.无刷直流电机控制技术综述[J].微特电机,2002(3):11-13.
[3] 周凤岐,陈 瑜.一种新型的伺服系统一变结构谐波传动电动伺服系统[J].导弹与航天运载技术,2001(3):3-4.
[4] 董慧芬,周元均,沈颂华.双余度无刷直流电动机容错动态性能分析[J].中国电机工程学报,2007,27(21):80-180.
[5] 周元均.双绕组无刷直流电动机的数学模型与转矩特性[J].电工技术学报,2004,19(4):10-18.
[6] 张小林.小型飞机器机载计算机的余度设计技术[J].西北大学学报,2001,19(2):274-278.
[7] Green S,Atkinson D J,Jack A G,et al.Senseless operation of a fault tolerant PWM drive[J].IEE Proceedings of Electric Power Applications,2003,150(2):1030-1038.
[8] 刘 彬,刘景林,马瑞卿.双余度稀土永磁无刷直流电机驱动控制系统[J].微电机,2004,37(1):26-28.
[9] 向茂溪.大功率双余度机电作动系统关键技术的研究[D].北京:北京航空航天大学,2002.
[10] 昃 萌,望自强,周元钧.机载电液作动器驱动器的双余度控制[J].电力电子,2006(1):18-26.
[11] Ede J D,Atallah K,Wang Jiabin,et al.Effect of optimal torque control on rotor loss of fault tolerant permanent magnet brushless machines[J].IEEE Transactions on Magnetic,2002,38(5):312-320.
[12] 杨 平.双余度无刷直流电机控制系统设计及性能研究[D].西安:西北工业大学,2005.
[13] Moreira J C.Indirect sensing for rotor flux position of permanent magnet AC motors operating over a wide speed range[J].IEEE Transactions on Industry Applications,1996,32(6):1394-1401.
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
小读者(2021年2期)2021-03-29 05:03:20
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
自动化学报(2019年6期)2019-07-23 01:18:36
汽车观察(2018年10期)2018-11-06 07:05:28
电子制作(2018年1期)2018-04-04 01:48:14
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
制造业自动化(2017年2期)2017-03-20 14:26:08