基于MEMS的吊车系统摆角无线测量*
2014-09-25 08:19:24高丙团张罗马范怡然朱振宇
传感器与微系统 2014年9期
高丙团, 张罗马, 范怡然, 朱振宇, 周 勰
(东南大学 电气工程学院,江苏 南京 210096)
0 引 言
在码头、仓库、工地等工业场所广泛应用着吊车系统,其在吊运过程中不可避免地会出现“摆动”现象,这种摆动会危害吊车作业和工人安全,也会降低吊车的工作效率。所以,对吊车系统进行有效的防摆控制非常必要,基于反馈控制进行防摆的一个重要前提是能够准确地进行摆角检测[1]。
吊车摆角检测方法主要包括光电编码器[2]、电位计[3]、视觉传感器[4]和倾角计[5]等。光电编码器和电位计一般只适用于小型的实验室实验装置,视觉传感器成本较高且易受环境影响;倾角计在检测过程中具有一定的优势,特别是基于微机电系统(MEMS)的倾角计成本较低。倾角计检测吊车摆角的缺点是当负载围绕吊绳转动时刻,则无法判断负载的实际摆动角度。在多数的吊运过程中,特别是单股吊绳的情况,负载一般都具有围绕吊绳转动的特征,此刻采用倾角计则不能准确检测负载的空间摆角,然而可采用广泛应用于航天航空的航姿参考系统(AHRS)模块[6]实现。
基于国内外在吊车系统和移动物体姿态导航方面的研究成果,本文提出一种吊车系统摆角检测方法:由2套基于MEMS传感器的AHRS模块分别检测吊车和负载的空间姿态,经无线传输后相互校核解算获得吊车负载的摆角。
1 检测系统设计
吊车系统负载空间摆动和设计的摆角检测系统如图1所示,参考坐标XOY固定在吊车本体上,吊杆的末端A连接吊绳的始端,吊绳末端B连接负载,负载在空间摆动,o点为A点在水平面oCBD的投影。最终需要测量的空间摆角为θx和θy,θx为负载相对于吊臂的左右方向的摆动,θy为负载相对于吊臂的前后方向的摆动。
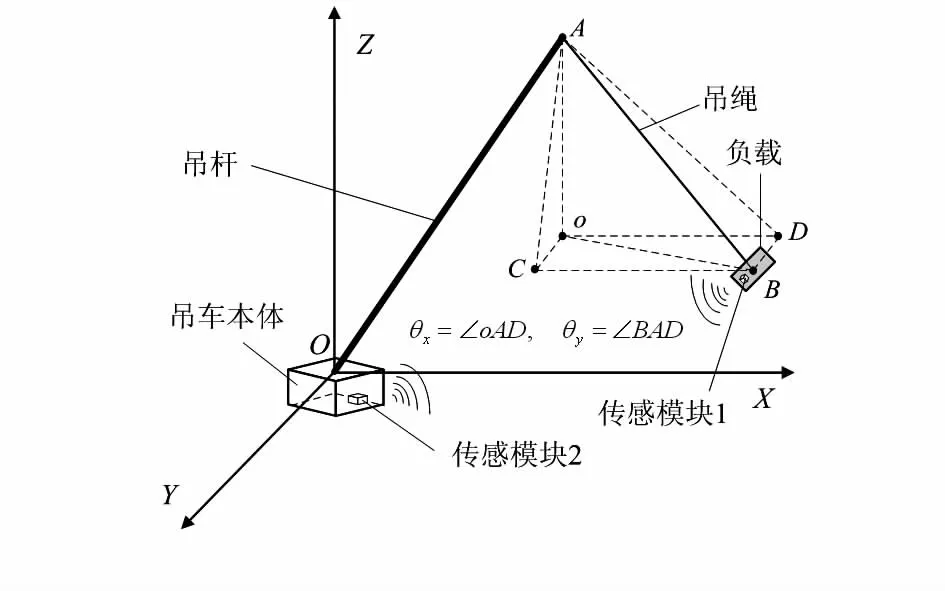
图1 吊车摆角无线检测示意图
传感器1安装在吊绳末端的吊钩上,作用是采用基于MEMS技术的三自由度的磁场计、三自由度的陀螺仪和三自由度的加速度计测量计算并通过扩展卡尔曼滤波得到吊钩的空间姿态参数;传感器2安装在吊车本体控制箱中,可得到吊车本体的空间姿态参数;本文中采用导航学中常用航向角ψ、俯仰角θ和横滚角φ作为空间载体的姿态角。Zig Bee无线通信模块将传感器1测得的吊钩空间姿态参数传送给传感器2,传感器2的处理器通过对吊钩和吊车本体两部分的姿态进行标定解算,得到吊车负载相对于吊车本体的空间摆角θx和θy并最终将该摆角信息上传至吊车控制系统,进行防摆控制。
2 摆角的解算
吊车的摆角解算包括2个重要步骤:1) 基于MEMS传感器的AHRS解算;2) 基于AHRS信息的吊车摆角标定解算。基于MEMS传感器的AHRS解算主要包括:首先,基于三自由度加速度传感器计算得到物体俯仰角θ和横滚角φ;其次,基于三自由度磁场计计算得到物体的航向角ψ;最后,结合三自由度的陀螺仪的数据结合姿态更新算法(如扩展卡尔曼滤波)对物体的空间姿态参数进行实时更新。对于基于MEMS传感器实现AHRS解算的具体方法不是本文的重点,可参考文献[6,7]。本文重点在于如何采用基于MEMS技术的AHRS模块实现吊车摆角的无线检测。
结合图1,由于俯仰角与横滚角都是反映载体坐标XOY平面与参考坐标XOY平面夹角的姿态角,假设吊绳平行于传感模块1中MEMS器件的Z轴方向,对于吊钩/负载针对吊绳没有旋转的特殊情况:坐标系中某一特定位置只存在两者中的一个角,这样就可以将2个角简化成一个。设只有俯仰角,横滚角为0,则传感器模块1检测到的俯仰角为θ=∠oAB,传感模块1和传感模块2检测到的偏航角之差为Δψ=∠BoD,根据三角几何可知
sin∠oBA=sin∠ABD·sin∠ADo,
cos∠ABD=cos∠oAB·cos∠oBD.
θy=arcsin(sinθ·sin Δψ),
(1)
θx=arccos(cosθ·secθy).
(2)
对于一般情况下负载在参考坐标系中既有横滚角又有俯仰角,可利用方向余弦矩阵旋转成上述特殊情况。不妨设一般情况下负载AHRS解算得到的空间姿态为(ψ,θ,φ),同时设特殊情况下的航向角为ψ′,俯仰角为θ′。需要注意的是,负载在摆动时不仅随绳子摇摆,还有可能绕着绳子自身旋转,这种情况可以看成负载在载体坐标系中绕Z轴旋转一个角度α,故还需左乘方向余弦矩阵
(3)

(4)
由式(3)中对应项相等,可解得
θ′=arccos(cosφ·cosθ),
(5)
(6)
θ′为特殊情况下的俯仰角,且θ′范围为[0°,180°];ψ′即是相对于参考坐标系的偏航角,此时即可将它与传感模块2检测的偏航角相减,得到Δψ。至此已求得转换到特殊情况下的偏航角Δψ和俯仰角θ′,则将式(5)和式(6)代入式(1)和式(2),可求得一般情况下吊车摆角摆角θx和θy。
3 实验验证
实验系统的结构如图2所示。每一个传感模块由电源模块、AHRS模块和Zig Bee模块组成;AHRS模块由ARM STM32F103TB嵌入式处理器集成MEMS器件三轴陀螺仪和三轴加速度计MPU6050,三轴磁力计HMC5883实现载体的空间姿态检测;AHRS模块得到的姿态信息由串口经过基于CC2530的Zig Bee模块进行无线通信。传感数据可经过传感模块2基于串口上传给上位机使用和处理。
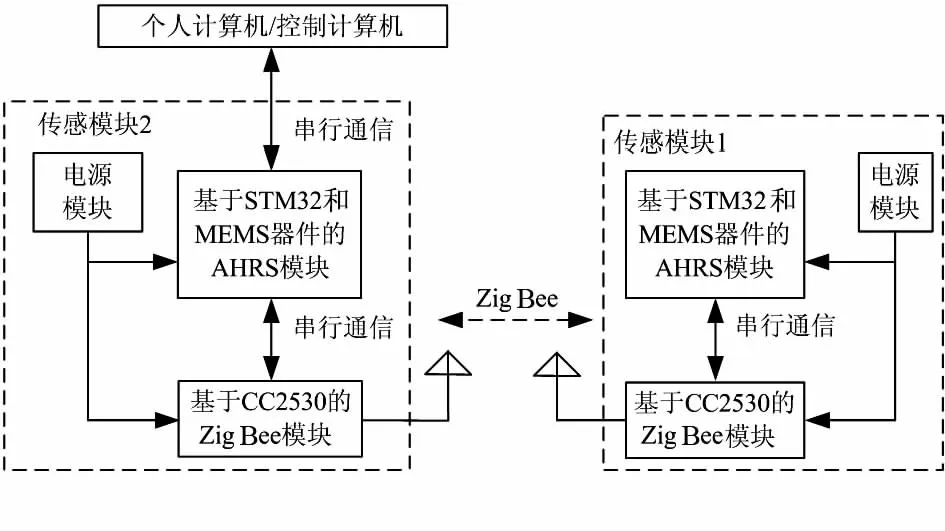
图2 实验系统结构
基于实验平台进行了静态摆角和动态摆角的检测,静态摆角的检测结果如表1所示,动态摆角检测的结果如图3所示。静态检测通过将负载固定至4个典型的角度进行静态检测;动态检测将负载拉至任意空间角度后释放,记录产生的自然摆动角度,上位机记录周期为50 ms。表1所示的静态检测结果显示检测的误差随着角度的增大而增大,负载在小范围摆动时候检测角度的误差小于1°,摆动角度接近60°时,检测最大误差接近3°;且由于θx要基于θy进行计算,因此,前者的误差要大于后者,这也在实验结果中得到正确体现。图3所示的动态检测结果显示,摆动呈现平滑的周期性,且由于阻尼的存在呈现一定的衰减,这与实际摆动情况符合。
根据上一节的摆角的理论解算可知,摆角的检测精度依赖于基于MEMS传感器检测的空间姿态角(ψ,θ,φ)的解算精度,目前较好的基于MEMS的AHRS产品检测误差可小于0.5°[8],该精度能够满足吊车摆角检测与防摆控制的要求。
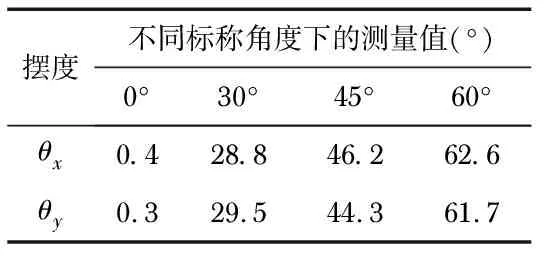
表1 摆角静态检测实验结果
4 结束语
本文设计了一种基于MEMS器件和Zig Bee无线通信的吊车摆角检测系统,给出了吊车系统基于AHRS模块的摆角计算公式,实验验证了提出方案的正确性和可行性。提出的吊车摆角检测方案具有成本低,检测模块体积小,易于安装的优点,可推广用于吊车系统摆角检测和防摆控制。
参考文献:
[1] Ngo Q H,Hong K S.Sliding-mode antisway control of an offshore container crane[J].IEEE/ASME Transactions on Mechatronics,2012,17(2):201-209.
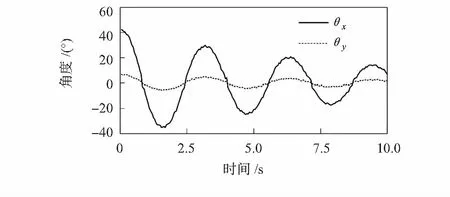
图3 摆角动态检测实验结果
[2] Liu D,Yi J,Zhao D,et al.Adaptive sliding mode fuzzy control for a two-dimensional overhead crane[J].Mechatronics,2005,15:502-522.
[3] Gao B,Chen H,Zhang X,et al.A practical optimal controller for underactuated gantry crane systems[C]∥Symposium on System and Control of Aerospace and Aeronatics,2006:720-725.
[4] Yoshida Y,Tsuzuki K.Visual tracking and control of a moving overhead crane load[C]∥IEEE International Workshop on Advanced Motion Control,2006:630-635.
[5] Yu Y,Ou J,Zhang C,et al.Wireless inclinometer acquisition system for reducing swing movement control module experiment of hook model[C]∥Proceedings of SPIE,Sensors and Smart Structures Technologies for Civil,Mechanical,and Aerospace Systems,2008:693216—1-693216—9.
[6] Markley F L,Crassidis J L,Cheng Y.Nonlinear attitude filtering methods[J].Journal of Guidance,Control,Dynamics,2007,30(1):12-28.
[7] 张荣辉,贾宏光,陈 涛,等.基于四元数法的捷联式惯性导航系统的姿态解算[J].光学精密工程,2008,16(10):1963-1970.
[8] VectorNav Technologies LLC.Specifications of VN—100 IMU/AHRS[EB/OL].[2014—01—15].http:∥www.vectornav.com/products/vn100-smt?id=30.
猜你喜欢
施工技术(中英文)(2022年21期)2022-12-12 03:22:50
农家参谋(2020年4期)2020-06-15 02:55:38
制造技术与机床(2019年7期)2019-07-22 03:42:24
电子测试(2018年23期)2018-12-29 11:11:26
科教导刊·电子版(2018年5期)2018-06-07 09:37:32
石油化工建设(2017年5期)2018-01-26 07:07:03
幼儿画刊(2017年1期)2017-03-20 15:51:50
亚太教育(2016年35期)2016-12-21 19:41:42
学苑创造·A版(2016年9期)2016-10-10 11:22:38
中国机械(2014年23期)2014-10-21 20:07:27