滑道三向调位设备滑移接触的建模与测试
2014-09-20 03:14:58
建筑施工 2014年12期
武汉市交通基本建设工程质量监督站 武汉 430015
钢套箱在船台上制作后下水是在钢套箱建造基本竣工之后,将钢套箱从船台建造区移到水中去的工艺过程。机械化钢套箱下水有其独特的优点,越来越被钢套箱或船体制作技术发展所采用。使船台工程水下段井字梁安装滑道面的精度达到设计要求,是船台施工的难点之一。采用常规的安装方法需要安装或架设临时的辅助结构,使施工进度较慢,施工成本增加;同时手动调位对吊具操作员的技术要求较高,且受水上风浪影响,将很难达到作业要求。
因此,本文设计了一套三向调位设备,通过3 组油缸的协同动作完成三向精确调位;研究了其三维调位过程中的滑移接触力学模型,并进行了三向调位设备摩擦接触性能试验,通过试验测定了滑移副的滑动摩擦因数。
1 三向调位设备设计及其工作原理
为得到调位范围内任意的三维位移,采用正交放置的3 组油缸构成三向调位设备,如图1所示。三向调位设备的3 组油缸可提供推力(或拉力),使相应结构在某个方向上产生单向位移,3 组油缸同步运动便能得到调位范围内任意的三维位移,则与三向调位设备相连接的被调结构在连接点处同步产生相同的三维位移。
采用3 台以上三向调位设备进行同步调位,便能实现被调结构在空间6 个自由度上的位移调整。为保证能够对被调对象进行空间内3 个位移自由度调位,三向调位设备选用了3 组液压油缸作为顶推动力,其中2 组水平正交放置的油缸对应2 对滑移副,使得被调对象能进行水平面内各个方向的位移,1 组垂直放置的油缸完成被调对象竖直方向的位移。同时纵向放置的油缸与同被调设备连接的连接板之间用球铰连接,使得三向调位设备能适应被调对象在一定范围内的偏转。

图1 三向调位设备结构示意
三向调位设备中垂直油缸、水平横向油缸和水平纵向油缸行程均为200 mm,使得本套设备具有较大的调位范围,显著降低了吊装过程中的人工操作难度。井字梁整体落位后通过三向调位设备进行自动化粗调和精调,并通过安装在油缸内的磁致伸缩传感器实现高精度的闭环控制。
2 三向调位设备滑移接触力学建模与测试[1,2]
2.1 三向调位设备滑移接触力学模型
在正常使用条件下,三向调位设备的底座被固定在水平面上,1 组水平纵向油缸安装在底座上,活塞杆法兰盘与滑移箱固接。
垂直油缸产生竖直方向位移,其顶部采用球铰连接。滑移箱底部的滑移块与底座上表面构成了一对滑移接触面,在水平纵向油缸的作用下除底座和水平纵向油缸外的结构通过这对滑移接触面产生水平纵向位移;水平横向油缸安装在滑移箱上,活塞杆法兰与垂直油缸外壁固接,垂直油缸底部的滑移块与滑移箱箱底构成了1 对滑移接触面,在水平横向油缸的作用下垂直油缸及以上结构通过这对滑移接触面产生水平横向位移。
因此,竖直方向位移外,其余两个方向的调位均需通过滑移实现。调位滑移过程中有2 对接触界面,即水平接触界面和垂直接触界面。这种接触问题属于具有表面非线性的弹性接触问题,其中的非线性包括接触面积变化引起的非线性、接触压力分布变化引起的非线性和摩擦引起的非线性。
假设其中任意一对的2 个接触结构分别用I和II表示,则该2 个结构的等效平衡方程可表示为:

式中:KI,KII——结构I和II的总体刚度矩阵;
uI,uII——结构I和II的位移向量;
PI,PII——结构I和II的载荷向量;
RI,RII——结构I和II的接触力向量。
当接触状态确定后,式(1)和式(2)可解。接触边界的法向位移连续性方程为:

式中:εnj——第j个接触点对的法向间隙;
uIj,uIIj——结构I和II在第j个接触点对的法向位移。
接触边界的切向位移连续性方程为:

式中:ετj——第j个接触点对的切向间隙;
vIj,vIIj——结构I和II在第j个接触点对的切向位移。
表面压力p的积分即为2 个接触结构的总载荷:

任一点在接触面的表面位移为:

式中:akj——节点k在单位力作用下的位移;
fj——接触界面节点j的荷载;
m——节点个数。
则式(6)可写为:

式中:u——位移向量;
f——载荷向量;
A——柔度矩阵。
取接触面为研究对象,则可写出接触物体I和II的平衡方程为:

式中:KI,KII——I和II的整体刚度矩阵;
KIc、KIIc、KcI、KcII、Kcc——由接触元素有关向量构成的3×3矩阵,矩阵中各元素取值可为-1、0和1,具体由接触状态决定;
ΔR——接触点对的等效节点力向量增量;
δc——初始相对位移;
ΔuI,ΔuII——I和II的位移增量矩阵;
ΔPI和ΔPII——I和II的载荷增量矩阵。
2.2 滑移接触界面摩擦性能测试
在三向调位设备中,采用的滑移副为MGE板+镜面不锈钢板。工程实践证明,MGE板具有耐磨、摩擦因数低、动静摩擦因数相差小、承载力大等特点,能够较好地消除因轨道局部不平带来的负面影响。
MGE板的拉伸强度≥30 MPa,压缩强度≥65 MPa,密度在1.0~1.1 g/cm3之间,线膨胀系数在8.0~9.1×10-5°C之间。
为测定滑移接触界面摩擦性能,通过垂直放置的液压油缸模拟负载,在水箱中利用液压油缸推动受载的滑移箱滑移,滑移箱的滑移面均为MGE板-镜面不锈钢板滑移副。记录连接负载油缸的泵站溢流阀开启压力以及在滑移箱正好滑动时连接顶推油缸的泵站溢流阀开启压力,并分析两者之间的关系,得到摩擦性能相关信息。
实验开始后,先调定负载泵站输出回路溢流阀的开启压力值,然后由0开始逐渐增加推力泵站输出回路溢流阀的开启压力值,直至滑移箱开始滑移,记录数据。为了尽量还原实际工况,进行了2 组试验,第1组试验水箱内为清水,第2组试验水箱内混入了大量泥沙。试验数据见表1。
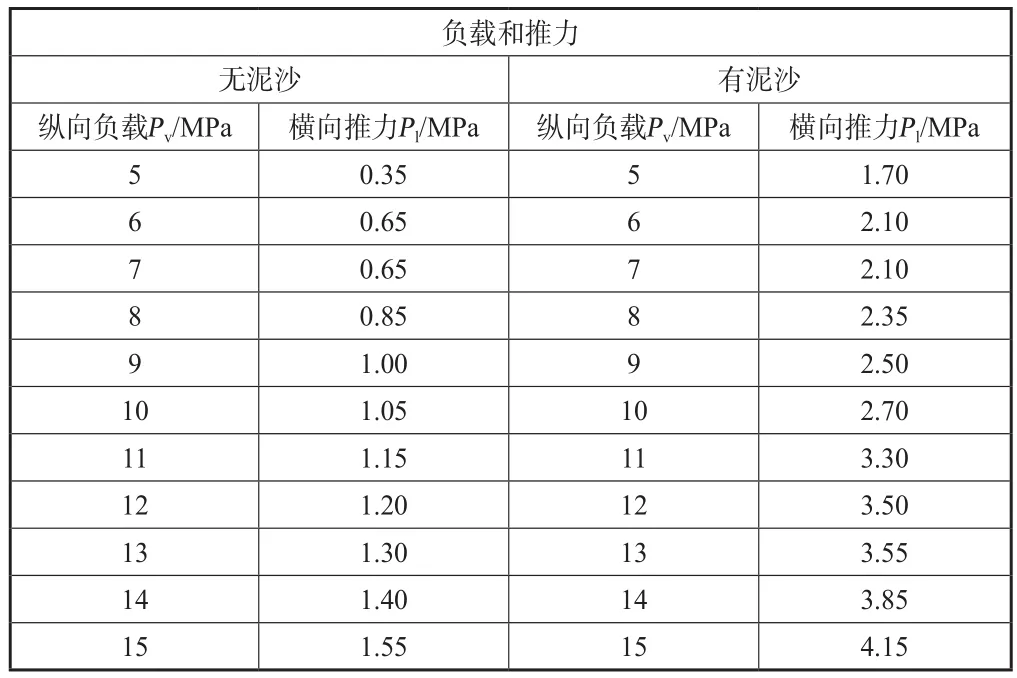
表1 负载和推力关系
以负载油缸压力为自变量,横向推力油缸负载为因变量,对数据进行一次函数拟合。在水下无泥沙环境下,拟合结果如图2所示。
观察可知,试验所得的曲线能够用一次函数较为准确的拟合。根据拟合曲线的斜率求解滑动摩擦因数:

在水下有泥沙环境下,拟合曲线如图3所示。

图2 无泥沙水下环境摩擦阻力线
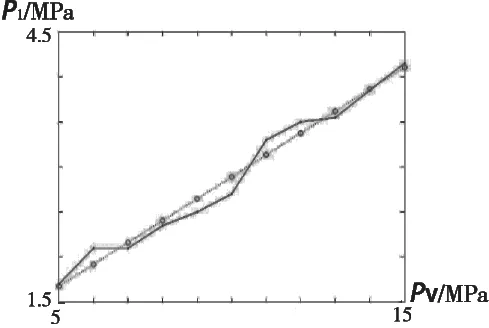
图3 有泥沙水下环境摩擦阻力线
对比可以发现,相同负载条件下,水下有泥沙环境下横向推力油缸压力大于水下无泥沙环境下的压力。根据曲线斜率求解滑动摩擦因数:

根据试验结果可知,在水下有泥沙的环境下,MGE板-镜面不锈钢板滑移副的滑动摩擦因数为0.122,而水下无泥沙环境中摩擦因数仅为0.053。因此在选用这对滑移副时,必须明确其工作环境,才能保证设备的正常工作。
3 结语
(a)为得到调位范围内任意的三维位移,设计了三向调位设备,利用3 组油缸提供推力(或拉力),使相应结构在某个方向上产生单向位移,3 组油缸同步运动得到调位范围内任意的三维位移。
(b)基于接触力学理论建立了三向调位设备施工过程的接触模型,有效描述了施工过程的结构特性,可为实际施工提供计算方法和理论指导。
(c)进行了三向调位设备摩擦接触性能试验,测定了MGE板-镜面不锈钢板滑移副的滑动摩擦因数。结果表明,水下无泥沙环境中的摩擦因数远小于有泥沙环境。
猜你喜欢
数学小灵通·3-4年级(2024年2期)2024-05-15 02:03:36
中学生天地(B版)(2022年4期)2022-05-17 02:05:55
装备制造技术(2021年4期)2021-08-05 07:39:40
小学生学习指导(中年级)(2021年3期)2021-04-06 09:12:08
冶金设备(2020年2期)2020-12-28 00:15:34
小学生学习指导(低年级)(2020年9期)2020-11-09 09:11:30
水利规划与设计(2020年1期)2020-05-25 08:01:32
中国水土保持科学(2019年6期)2019-04-26 05:14:24
纤维复合材料(2018年2期)2018-12-07 00:41:42
小学生学习指导(高年级)(2017年3期)2017-02-17 10:29:23