
济南普利中心工程核心筒液压爬升模架系统技术*
2014-09-20 08:02
建筑施工 2014年8期
上海建工集团股份有限公司 上海 200080
1 工程概况
济南绿地普利中心项目位于济南市中区普利街、共青团路及顺河高架桥的三角地带,地理位置优越,东拥泉城路和泉城广场,西揽人民商场与大观园,南邻趵突泉,北依大明湖。总建筑面积20 万m²,总高度301.2 m,主塔楼地上60 层,地下3 层,楼层状况为:1F~5F及裙楼公园的商业区,6F~30F的办公区 ,32F~56F的公寓区。57F~60F的星级会所。
主楼结构为钢混组合框筒结构体系,核心筒为混凝土结构,外框柱为钢管填充混凝土柱,框架和楼面梁均为钢结构,楼面采用压型钢板楼面。
核心筒结构平面形状是六边形,在六个转角处埋置有劲性钢骨柱,分别和外伸钢梁及外框架柱刚接。
层数为60 层,结构层高1F为6 m,2~5F为5.4 m,6 ~39F为4.2 m, 30F为4.8 m, 31F为5.3 m, 31MF为3.14 m, 32~58F为3.6 m, 59F为5.4 m, 60F为5.6 m。
其中31MF层为核心筒结构转换层,以此层为界,核心筒内部剪力墙平面布置发生了很大变化,见图1。
2 主楼施工模架方案选择及应用思路
2.1 主楼核心筒工程特点及难点

图1 主塔楼核心筒典型平面
(a)核心筒平面形状呈六边形,内筒剪力墙分别分割布置对液压内平台的设计带来较大的难度;
(b)在核心筒六个转角处埋置有劲性钢骨柱,外伸钢梁分别与钢骨柱和外框架柱刚接,此处钢梁需先行施工,因此,外爬架爬升需要解决穿越钢梁的难题;
(c)内外剪力墙都发生截面收缩变化,这对爬升平台和爬升工艺的设计带来难题,剪力墙外墙厚度有较大收缩变化,由1 000 mm收缩至500 mm,内芯剪力墙厚度分别有600 mm、500 mm和400 mm三种;
(d)31F以下和32F以上核心筒内部竖向结构布置发生很大变化。内平台要设计2 套体系,才能满足工程结构施工全过程的要求;
(e)剪力墙的不规则布置和变化形成多个尖角平面形状,对竖向模板的设计和施工带来相当的难度;
(f)由于剪力墙结构形状复杂多变,层高变化多达8 种,故模板的规格多、组拼施工难度大;
(g)31MF结构转换层的施工也是个难题。
2.2 液压爬升模架系统应用主要技术思路
根据济南普利中心的工程结构特点及总承包项目部的总体施工步骤要求,根据相关规范、规程及法规的要求,综合多方面的因素考虑,确定主楼核心筒结构(地上部分)采用多功能液压爬升模架系统技术进行施工。
主楼核心筒原则上竖向结构先行施工,水平结构滞后施工,31MF以上局部水平结构与竖向结构同步施工。滞后的水平结构与外框楼面同步施工。
济南普利中心液压爬升模架系统分为外爬架和内平台2 种结构形式。外爬架应用于筒体外围的爬升施工,每组有2 个机位;内平台应用于筒体内部施工,主要是4 机位平台。根据该建筑尺寸和液压爬升模架的设计参数,设置外爬架9 组,共18 个爬升机位;4 机位内平台5 组,共20 个爬升机位,2 机位内平台6 组,共12 个机位,总计50 个爬升机位。31F以下和32F以上,机位平面布置见图2、图3。

图2 31F以下液压爬架布置示意

图3 32F以上液压爬架布置示意
3 模架系统的原理和构成[1-8]
3.1 液压爬升模架系统原理及功能特点
模架系统采用液压为动力进行爬升,利用附墙系统以及承重机械系统作为支承载体及爬升构件。施工中的主要架体结构可以简单地分为绑筋操作架,模板操作架以及设备操作架。
模架系统设计思路宏观上分为单元式和整体式2 种。传统的人工碗扣式脚手架即是单元式设计,其布置组合灵活,适应性强,但是整体性较差。而顶升钢平台系统则采用整体式设计思路,其优点是整体刚度好、承载能力强,但是体型笨重,用钢量较大,如遇到外伸钢梁或者桁架,需要重新解体再安装,并且也不能随着剪力墙的收缩而伸缩变化,适应性差。液压爬升模架系统结合了二者的优点,进行单元式设计,根据施工安全和效率的需要,可以通过自动控制技术,将液压爬升模板系统的所有单元组合成有机整体,实现单元柔性连接,整体同步爬升。
3.2 模板系统
模板系统由钢大模和模板悬挂系统构成,主要满足模板安装、校正、拆除作业的施工,该系统通过滑轮移动装置,可以自由调节,结构简单,可以轻松满足模板的安装就位及纠偏工作。
济南普利中心核心筒项目,工程结构标准层高4 200 mm,因此,模板标准段高度采用4 350 mm,上部与楼层标高平,底部下放150 mm。32F以上标准层高变为3 600 mm,为最大限度增加模板的利用率,将模板分成600 mm和3 750 mm两段,施工至32F以上后拆除上段。
模板面板采用5 mm钢板,肋采用8#轻型槽钢,围檩采用10#普通槽钢,边框采用80 mm×8 mm角钢与10 mm×80 mm扁钢,以确保模板框的刚度,方便模板上、下流水段间的密贴安装,采用粘贴发泡泡沫粘带条的方法止浆。
3.3 操作平台系统
操作平台系统是指为绑扎钢筋、模板支护等施工操作提供作业和堆载的平台,并且可携带钢大模整体爬升的架体系统。虽然操作平台系统有多种结构形式,但其竖向功能区段的划分均类似,主要包括绑筋操作架、模板操作架、设备操作架3 部分(图4)。
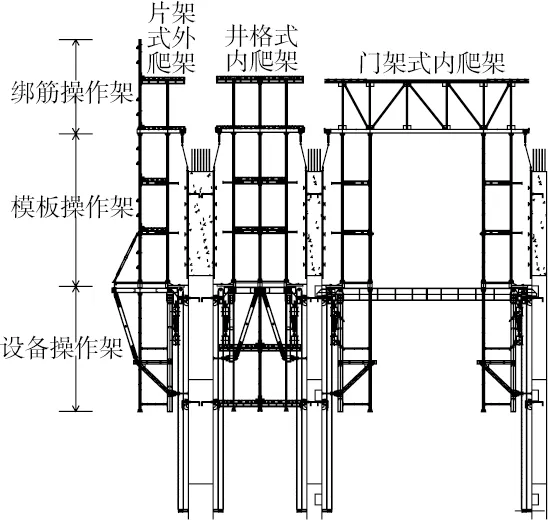
图4 液压爬架操作平台系统划分
(a)绑筋操作架:主要用于钢筋绑扎和提供堆载平台。共2 层,每层高2 m。
(b)模板操作架:用于模板的安装固定及拆卸。共3 层,每层高2 m。前立杆为双拼8#槽钢,后立杆为HT100 mm×100 mm,模板悬挂梁为16#工字钢,模板操作架的横向水平连杆为1 根Φ48 mm脚手管和1 根5#槽钢组成,脚手管可根据需要进行伸缩。模板操作架顶部的模板悬挂梁安装有模板滑移悬挂装置,可进行模板的立模、拆模操作。
多组绑筋操作片架和模板操作片架由纵向水平连杆(脚手管)连接组成一个整体,连杆上铺设木隔板形成走道平台,操作架前立杆在结构施工层区间设置了水平拉结构造,作为安全保险措施与结构连接。后立杆内侧每层加设2 道脚手管安全栏杆,后立杆H型钢翼缘内可安装钢丝网片。
(c)设备操作架:用于液压设备的布置和爬升机构的操作,结构已施工层的安全围护以及附墙装置的拆卸。设备操作架每个架片高度为5 m。前立杆采用2 根Φ48 mm钢管组成,后立杆采用HT100 mm×100 mm型钢,走道横连杆为2 根Φ48 mm钢管组成的组合连杆。各设备架片间水平走道采用钢管扣件连接,背立面也采用钢管扣件连接形成安全栏杆。
3.4 爬升机械系统
爬升机械系统是系统的爬升、承重构件。模架工作状态的传力路径为:施工荷载/结构自重/风荷载等→爬模架体→承重构架系统→附墙构件系统→结构墙体。
爬升机械系统由附墙构件装置、导向装置、承重构架装置、防坠装置4 个子系统组成。其中附墙装置是爬架同结构连接的机构,导向装置、防坠装置是爬架的爬升机构,承重构架装置是爬架传递架体荷载的机构。
3.5 液压动力系统
液压动力系统是模架的动力机构,能够实现单元顶升和多机位整体顶升,系统由液压油缸、电动泵站及相关配件有机联系形成一个动力模块。
3.6 自动控制系统
自动控制系统采用先进的计算机闭环控制技术,系统接受操作人员的工作命令,对液压模架进行驱动和控制,同时采集系统的工作状态,反馈给计算机,对控制进行修正和调节,确保爬升作业的安全可靠。

图5 爬架控制系统原理
控制系统采用计算机闭环控制。系统接受操作人员的指令,对液压爬模进行驱动和控制,同时采集液压爬模的工作状态信息,反馈给计算机,
因此,系统由传感检测、运算控制、液压驱动三部分组成核心回路,以操作控制进行人机交互,以安全控制提供安全保障,从而形成一个完整的控制闭环。
3.6.1 控制方式
本系统控制方式有总控、单控等2 种。
(a)总控:所有爬升单元在总控操纵下统一启停泵站、同步作业。
(b)单控:各爬升单元在各自操纵下分别启停泵站、分别作业(可以同时进行)。
3.6.2 作业方式
本系统作业方式有6 种:
(a)总控爬模:所有单元同时进行同步的爬模爬升。
(b)总控导轨:所有单元同时进行同步的导轨提升。
(c)总控单步:所有单元同时进行同步的单步操作。
(d)单控爬模:各单元独立进行爬模爬升。
(e)单控导轨:各单元独立进行导轨提升。
(f)单控单步:各单元独立进行单步操作。
4 液压爬升模架系统主要施工技术应用
4.1 核心筒标准层施工技术
济南普利中心标准层层高4.2 m和3.6 m,标准层共计52 层,占到施工中绝大部分,液压爬架的标准层施工流程如下:
流程一:浇捣第N结构段结构混凝土;
流程二:养护第N结构段混凝土期间,绑扎第N+1段钢筋;
流程三:第N结构段混凝土养护等强后,拆模;同时安装模架附墙装置;
流程四:液压顶升导轨4.2 m(3.6 m),固定导轨;拆除最下端附墙装置,以备下次使用;
流程五:液压顶升模架系统4.2 m(3.6 m),由N-1段爬升至N段,并完成力系转换;4 机位平台底部大梁支腿支撑于核心筒墙体预留洞内,模架系统内外架体顶部连接;
流程六:清理模板,安装爬架预埋螺杆,预留底部大梁支腿支撑洞,测量定位校正立模;进入N+1段结构施工流程。
4.2 液压爬架非标准层爬升施工的处理
结构的3~5F为层高5.4 m的非标准层,因此液压爬升模架拟在第三框结构施工完毕后开始组装,在第三框结构墙体上埋置安装固定螺栓。
4~5F总高度为10.8 m,拟划分为3 次爬升,每次爬升高度为3.6 m。
30F层高4.8 m, 31F层高5.3 m,一次性爬升;模架施工完31F层框后,模架停留在31F层框位置。
利用内爬架平台,增加斜拉杆加强后,作为31MF楼层梁板施工的支撑架,来完成31MF水平结构施工。
31MF层框,以及32F、33F采用脚手架支撑完成施工。
在33F层框上重新组装内平台模架系统,34F层以上进入标准层,层高3.6 m,一次性爬升。59F层高5.4 m,爬升2 次。60F无需爬升便可满足施工要求。
4.3 核心筒结构施工阶段人员垂直交通设计
根据施工需求,在内平台底部下挂人员交通架,施工人员从电梯通过内平台下挂的人员交通架可抵达施工作业层。
考虑到施工电梯的安装高度限制及压型钢板楼板作业层滞后因素的影响,设计人员交通挂架高12 m,跨越3 个层高,底部人员进出口与混凝土施工作业层相差6 个层高,满足电梯同楼层之间的交接。
4.4 剪力墙截面变化的收分处理
核心筒剪力墙外墙厚度有较大收缩变化,由1 000 mm收缩至500 mm,内芯剪力墙厚度分别有600 mm、500 mm和400 mm三种。为此液压自动模架模板系统也要作相应的变截面收分处理,具体收分的流程如下:
流程一:第N结构段施工完成,进入收分段爬升工艺(墙体截面收分200 mm为例);
流程二:在第N结构段先安装厚100 mm连接支座板,随后在其上安装附墙支座及附墙靴;爬升导轨适当高度,在导轨底部内侧面安置50 kN手动式液压千斤顶(每组爬架两机位同时安装);
流程三:顶升50 kN手动千斤顶约70 mm,在顶升千斤顶同时,调节支撑腿螺杆顶紧墙体,使架体倾斜,然后导轨爬升到位,固定导轨;架体沿导轨爬升到位,完成力系转换;调节承重三角架可调支撑,使其支撑于墙体;
流程四:施工第N+1结构段;养护等强,拆模清理;先后顶升导轨、模架架体到位,此时架体仍为倾斜状态,进入第N+2结构段施工流程;
流程五:施工第N+2结构段;养护等强,拆模清理;先后顶升导轨、模架架体;
流程六:调节架体支撑腿螺杆,使模架架体以及导轨同墙面平行;调节承重三角架可调支撑,顶升架体到位,完成力系转换;至此全部完成墙体收分工艺。
4.5 穿越外伸钢梁的爬升
在核心筒的每个短边上两端设置外伸钢梁,外爬架在施工时,必须要避让这些钢梁。
外伸钢梁处于2 个外爬架单元之间,当外伸钢梁碰到外爬架时,只需依次打开相邻外爬架之间的立面翻门,完成外伸钢梁的依次穿越。立面示意见图6。

图6 外爬架穿越外伸钢梁立面示意
比如爬架附着于N框,施工N+1框混凝土,此时外伸钢梁处于爬架绑筋操作架,打开此处外爬架单元之间的翻门,在此处临时设置安全栏杆和安全网,爬架爬升时,只需依次打开翻门,爬升到位做好围护,当在外伸钢梁碰撞到外爬架的底平台前,打开底平台翻板,以便顺利通过。
4.6 高空拆除施工技术
首先要清除临时施工设备及架体上的杂物 (电焊机、乙炔瓶等),防止在拆除过程中发生高空坠物的事故,然后按以下顺序逐一规范操作拆除。
流程一:待第60框结构混凝土养护等强后,拆模;由塔机将模板运至地面;
流程二:液压顶升导轨5 m,利用塔机将导轨拔出,吊运至地面,导轨须一根一根吊装;
流程三:将爬架的液压设备和油管等拆除吊离架体;
流程四:在塔机协助下解除模板操作架同承重桁架间螺栓连接,并与绑筋操作架一起整体用塔机吊运至地面;
流程五:利用塔吊将爬架主平台及下挂脚手架整体吊起,保持不动;上人拆除附墙装置;待拆除附墙装置后,将爬架主平台及下挂脚手架整体吊运至地面解体。
5 结语
通过对济南普利中心项目主楼核心筒的施工,综合阐述了液压自动爬升模架系统的技术应用。在本次的应用中,取得了非常显著的技术效果,大大提高了施工效率,使用中经历冬季施工,标准层施工仍可以达到4~5 d/层;在施工中,模架系统爬升速度快捷,作业环境安全可靠,操作平台堆载能力较大,满足了施工的很多需求;架体组合灵活,可以小流水作业,外爬架通过翻板翻门的设置,能够有效解决穿越核心筒外伸钢梁施工难题;采用架体倾斜爬升的施工技术,解决了核心筒外墙收分的施工;在内平台底部下挂人员交通架,较好的解决了施工中的竖向交通问题;该模架系统重复利用构件多,降低了工程投入,取得非常好的经济效益。
济南普利中心核心筒液压爬升模架施工技术,取得了非常成功的应用,完善了超高层混凝土核心筒施工技术,所积累的经验与技术值得在我国超高层同类工程施工中大力推广。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
计算机仿真(2021年9期)2021-11-17
中国核电(2021年3期)2021-08-13
建筑施工(2021年3期)2021-08-06
建材发展导向(2021年13期)2021-07-28
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
中国特种设备安全(2019年7期)2019-09-10
新能源科技(2018年10期)2018-02-15
凿岩机械气动工具(2017年3期)2017-11-22
烟台果树(2015年3期)2015-12-10
