
智能传感器中神经网络激活函数的实现方案*
2014-09-20 08:02李宏伟吴庆祥
传感器与微系统 2014年1期
李宏伟, 吴庆祥
(福建师范大学 光电信息工程学院,福建 福州 350007)
0 引 言
目前,智能传感器多指嵌入了信息处理单元(如单片机,ARM,DSP)的传感器[1],然而这些传感器中有很多都没有实现具备学习功能的智能。人工神经网络经历了几十年的发展,现已成为计算智能中较为活跃的一个领域,并可以在传感器的非线性校正、故障自诊断、多传感器信息融合等领域发挥重要作用,使运用此算法的传感器成为具有学习功能的智能传感器[2]。神经网络的优势主要体现在两方面,一是并行性,二而是强大的非线性信息的处理能力与学习能力。神经网络之所以能处理非线性信息,这在很大程度上归功于神经网络的激活函数。因此,实现神经网络的激活函数就成为神经网络硬件化的重要组成部分。Sigmoid函数是应用得最为广泛的一类激活函数[3],并且考虑到现场可编程门阵列(FPGA)芯片可以灵活地嵌入到各种传感器中,本文研究FPGA实现Sigmoid函数的方法。
用FPGA实现此函数,常用的方法有查表法,分段线性逼近法、多项式近似法、STAM法、协调旋转数字计算机(coordinated rotation digital computer,CORDIC)算法等[5]。本文所采用的就是CORDIC算法与一种改进型高效除法器相结合的实现方案。
1 算法原理
Sigmoid函数的表达式为
(1)
若将其硬件化,主要有2个关键性问题:1)实现函数y=ex;2)完成除法运算。其中,CORDIC算法可以将复杂的指数运算转化为加减法运算和移位操作,适合在硬件上实现,在基于FPGA的信息处理系统中颇受关注。
CORDIC算法最早由Volder J[6]于1959年提出,20世纪70年代由Walther J[7]将此算法统一到双曲坐标空间中,并在图像处理、信号滤波等相关领域得到广泛应用。在双曲坐标空间内,逼近函数y=ex的原理如下
ex=sinhx+coshx.
(2)
可知,若要实现y=ex,只需实现coshx和sinhx,再将二者相加即可。假设某一向量的坐标为(coshθ1,sinhθ1),然后将此向量旋转Δθ,则旋转后的新向量坐标为(coshθ2,sinhθ2),其中
θ2=θ1+Δθ.
(3)
由双曲坐标空间的两角和关系得
coshθ2=cosh(θ1+Δθ)
=coshθ1cosh Δθ+sinhθ1sinh Δθ,
(4)
sinhθ2=sinh(θ1+Δθ)
=coshθ1sinh Δθ+sinhθ1cosh Δθ.
(5)
将式(3)、式(4)写成矩阵形式,有
(6)
又因为

(7)
将式(5)与式(6)联立得
(8)
式(7)表明了相差Δθ的2个向量的递推关系。至此可以得到如下的结论:初始坐标为(coshθ0,sinhθ0)的向量,经过i次旋转,每次旋转的角度为Δθi,i次旋转后得到的新的向量坐标为(coshθ,sinhθ),i≥1,再由式(8)的递推关系可得
(9)
现对Δθi作出如下规定
(10)
其中,“+”和“-”代表旋转的方向。由双曲坐标的相关公式可以推得
(11)
所以
(12)
当i→∞时,式(12)收敛于1.205 136,此值记作K。
2 系统设计
2.1 指数函数的逼近设计

(13)
(14)
因此,在每次迭代的过程中只涉及加减法和移位操作。
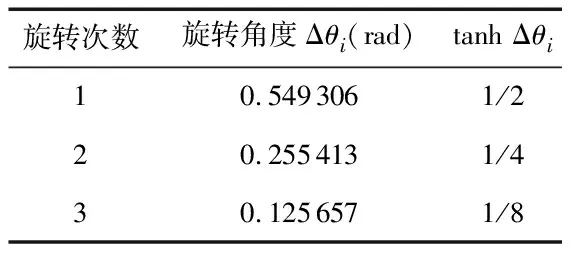
表1 前3次旋转的角度
2.2 除法器的设计
本文采用了一种经过改进的基于移位,比较与减法器的除法器设计方案。设置了4个寄存器变量,分别是被除数did、除数dis,商quo和余数rem。其中,被除数、商和余数的位宽都为N,除数的位宽为N/2。在除法器工作之前,先将余数初始化为0,即rem0=0。然后将被除数的最高位置于余数rem0的最低位,同时保持余数的位宽不变,rem0的最高位去掉,则新得到的余数rem1=0,0,...,0,did[N-1]。此时比较rem1与除数dis的大小,若rem1≥dis,则商的最高位置1,新的余数rem2=rem1-dis。若rem1≤dis,则商的最高位置0,然后将被除数的次高位置于余数rem1的末位,rem1的最高位去掉,以保证其位宽为N,新的余数rem2=rem1[N-2],rem1[N-3],......rem1[1],rem1[0],did[N-2],以此类推,便可得到N位的商quo。现举例说明,被除数did=1010,除数dis=11,先将余数rem0初始化为0000,将did的最高位1置于rem0的末尾,去掉rem0的最高位,这样新的余数rem1=0001,因为rem1
上述除法器有两点局限性:一是被除数要大于等于除数;二是被除数的位宽要是除数位宽的2倍。在Sigmoid函数中,分子小于分母,因此,要对此除法器做出改进。
Sigmoid函数中,分子位置的1用48位的二进制数表示,即最高位为1,其余各位均为0,且将此分子看作整数。分母的计算结果是由24位的二进制数表示的,其小数点在左数第四位和第五位之间。这就相当于分子的小数点相对分母向右移了27位,因此,在利用改进方案计算出商值之后,商的低27位均表示小数部分。
3 测试与验证
利用CORDIC算法与高效除法器得到的Sigmoid函数的仿真结果如表2所示,其中,CORDIC电路单元经历20个时钟周期得到输出结果。除法器在软件上设置了一个48次的循环程序。从中可以看出:仿真结果基本可以精确到小数点后4位,在精度上可以满足一定的要求。表2给出了3组仿真值与理论值。
4 结 论
本文采用流水线的方式,在FPGA上实现了神经网络的Sigmoid激活函数,在精度上和速度上均达到了一定的指标要求,可以满足智能传感器的故障自我诊断等需求。
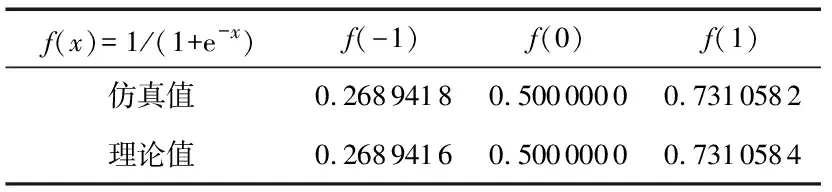
表2 3组仿真值与理论值
当然,如果要求更高的精度,可以适当扩展操作数的位宽和迭代次数,以满足传感器更高的智能化要求。下一步的工作是用这一函数来构建各种神经网络FPGA处理芯片,并应用到传感器信号的智能处理或基于FPGA的图像视频处理系统中。例如:在很多传感器中,都存在交叉敏感的问题,即传感器所测量的目标参数恒定时,而传感器的实际输出还会受到其他非目标参数的影响。为了解决交叉敏感的问题,可以采用多传感器信息融合的方法来剔除无用信息。此时,神经网络芯片模块便可植入到传感器当中,对输入的各种数据进行自适应学习,实现以学习为基础的数据融合,从而达到改善传感器性能的目的。
参考文献:
[1]刘君华.智能传感器系统[M]西安:西安电子科技大学出版社,2000:37.
[2]王 茜,董学人,尉吉勇,等.神经网络技术在智能传感器系统中的应用与发展[J] .自动化仪表,2005,25(7):1-3.
[3]张智明,张仁杰.神经网络激活函数及其导数的FPGA 实现[J].现代电子技术,2008,281(18):139-142.
[4]Myers D J,Hutchinson R A.Efficient implementation of piecewise linear activation function for digital VLSI neural network-s[J].Electronics Letters,1989,25(24):1662-1663.
[5]张 萧,黄 晞,仲伟汉,等.Sigmoid函数及其导函数的FPGA实现[J].福建师范大学学报:自然科学版,2011,27(2):63.
[6]Volder J.The CORDIC trigonometric computingtechnique[J].IRE Trans on Electronic Computers,1959,8(5):330-334.
[7]Walther J.A unified algorithm for elementary functions[C]∥Proc of Spring Joint Computer Conf,Berlin,1971:379-385.
猜你喜欢
护理与康复(2022年6期)2022-11-25
小学生学习指导(高年级)(2022年9期)2022-10-08
数学物理学报(2022年4期)2022-08-22
小学生学习指导(低年级)(2022年4期)2022-04-26
军事文摘(2021年22期)2022-01-18
数学小灵通(1-2年级)(2020年3期)2020-06-24
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
小学生学习指导(中年级)(2017年4期)2017-03-20
读写算·小学中年级版(2017年1期)2017-02-28
初中生世界·七年级(2016年4期)2016-04-21
