基于极限学习机的遥感影像阴影检测
2014-09-18 00:15安鹏飞王蒙军
电视技术 2014年15期
安鹏飞,王 霞,王蒙军
(1.河北工业大学信息工程学院,天津300401;2.中国人民解放军93658部队,北京100041)
高分辨率遥感影像常被用于城市地区的测绘工作,随着空间分辨率的不断提升,阴影成为一个不能够被忽略的因素,尤其是在太阳高度角较小时,阴影是遥感影像的一个重要组成部分[1]。虽然在许多城市遥感应用中不希望出现阴影,但是由于阴影自身的特点可以提供有用的信息。在航空测量学中,研究人员已经长期使用阴影信息来对建筑物进行检测和高度估计,因此非常有必要对遥感图像中的阴影进行预处理。阴影检测是阴影处理的重要步骤之一,对后续的遥感图像处理具有重要作用。
Jiang最早根据阴影区域的亮度低这一特点并结合阴影几何特性对阴影进行检测[2];Joshi利用支持向量机的方法,通过训练分类器实现了阴影区域的检测[3];Choi利用最大似然估计阈值法实现阴影区域的检测[4];许妙忠利用纹理分析的方法,通过共生矩阵和相应指数的计算,对遥感影像中的阴影检测做出了一个尝试[5];张晓美利用多光谱影像中的光谱差异从ALOS全色图像中提取到阴影信息[6];姜柯通过分析纹理边缘结合抽样推断法实现了阴影区域的自适应检测[7]。上述介绍的阴影检测方法大多以阴影自身的性质为出发点,初步实现了阴影检测,但是在检测速度和精度方面往往不够理想。
纹理在图像分析中具有重要的作用,在模式识别中常被用来辨别图像区域,纹理特征已被广泛应用于图像的分类识别[8],本文将辅以纹理特征的极限学习机[9](Extreme Learning Machine)作为分类器,将阴影纹理的能量、熵、对比度和逆差距4个指数作为输入特征向量训练学习机模型,实现遥感影像建筑物阴影检测。
1 图像特征选取
纹理特征表现地物的形状、均质程度、方位以及不同类地物间的亮度关系和空间关系,对图像中地物分类有很大作用。通常的纹理分析方法包括统计方法和结构方法。灰度共生矩阵是一种有效的纹理分析统计法,描述了一个像素和它周边相邻像素之间的灰度值关系。根据共生矩阵可以计算出大量的纹理指数,Haralick等定义了14种纹理指数,其中使用最广的有以下4个:
能量(Energy):是灰度共生矩阵元素值的平方和,也称角二阶距,反映了图像灰度分布均匀程度和纹理粗细度。当能量越大时,表明纹理模式是比较均匀和规则变化的。

熵(Entropy):是图像所具有的信息量的度量,当空间共生矩阵中所有值均匀相等时,熵能够取得最大值;熵表明了图像中纹理的非均匀程度或复杂程度。

对比度(Contrast):体现为图像的清晰度,即纹理清晰程度。在图像中,对比度越大,纹理的沟纹越深,图像的视觉效果越清晰,对比度小,则沟纹浅,效果模糊。

逆差距(IDM):度量图像纹理局部变化的多少,反映图像纹理的同质性,如果图像不同区域之间缺少变化,即局部均匀,则逆差距的值就比较大。

从Google Earth上随机下载选取一组样本图像,计算其灰度共生矩阵特征参数结果如表1所示。从阴影与非阴影区域计算对比结果来看,反映了各类纹理图像的可区分性。

表1 图像的纹理指数统计表
由于本实验采用的图像灰度级为256级,导致直接计算灰度共生矩阵计算量太大,所以采用将图像压缩到16级来计算,分别计算出4个纹理指数在0°方向、45°方向、90°方向和135°方向的灰度共生矩阵,然后取其平均值作为特征输入向量。
2 ELM原理
2.1 基本思想
为克服传统机器学习的缺点,Huang为SLFN(Singlehidden Layer Feedforward Neural Networks)提出了 ELM(Extreme Learning Machine)学习算法,是一种简单易用、有效的单隐层前馈神经网络新算法,在算法执行过程中不需要调整网络的输入权值以及隐元的偏置,其基本思想如下:
给定任意N个不同的样本(xi,yi),其中xi=[xi1,xi2,…,xin]T∈ Rn,yi=[yi1,yi2,…,yim]T∈Rm,g(x)为激活函数,隐含层数目为L,则ELM的模型可以表示为

式中:j=1,2,…,N;wi=[wi1,wi2,…,win]T表示输入节点和第i个隐含层节点的链接权重;βi=[βi1,βi2,…,βim]T表示第i个隐层节点与输出节点的连接权重向量;bi表示第i个隐层节点的阈值。ELM模型的矩阵表示形式为
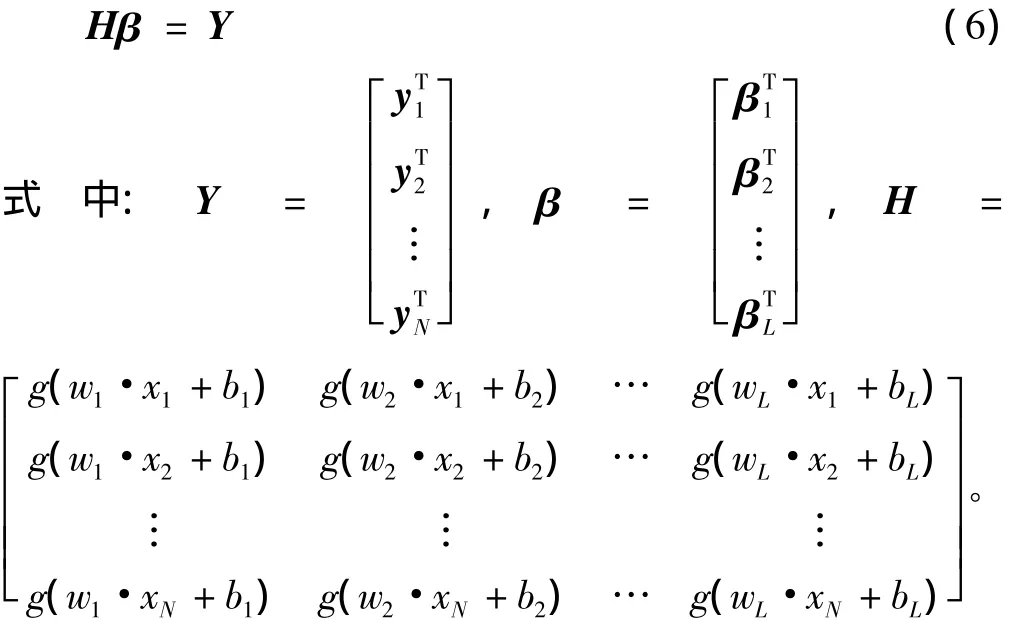
当激活函数g(x)无限可微时,权值w和b是可以随机选择的,且在训练之中保持不变。因此训练ELM就可以转化为计算Hβ=Y的最小二乘解问题。
ELM算法有3个步骤:
1)确定隐含层神经元个数L;
2)选择一个无限可微的函数作为隐含层神经元的激活函数g(x),进而计算隐含层输出矩阵H;
3)计算输出层权值^β(^β=H+·Y)。
2.2 隐层节点数确定
极限学习机隐节点的选取对实验结果有很大影响,本文采取指数增长法结合区间折半搜索法来对隐层节点数进行选择,主要分为两步:
1)首先通过指数增长法找到隐层节点数的大致范围。其中神经元数范围是[p,q]=[2j-1,2j],初始值j=1,输入权重和阈值随机产生,输出权重由最小二乘法计算获得。
2)在第一步找到隐含层节点数大致范围区间的基础上,利用区间折半搜索法,每次取区间的中点即c=[(p+q)/2]左边取整,计算网络的输出权值和误差,进而计算网络的输出,确定出最优隐层节点个数。具体步骤如图1所示。
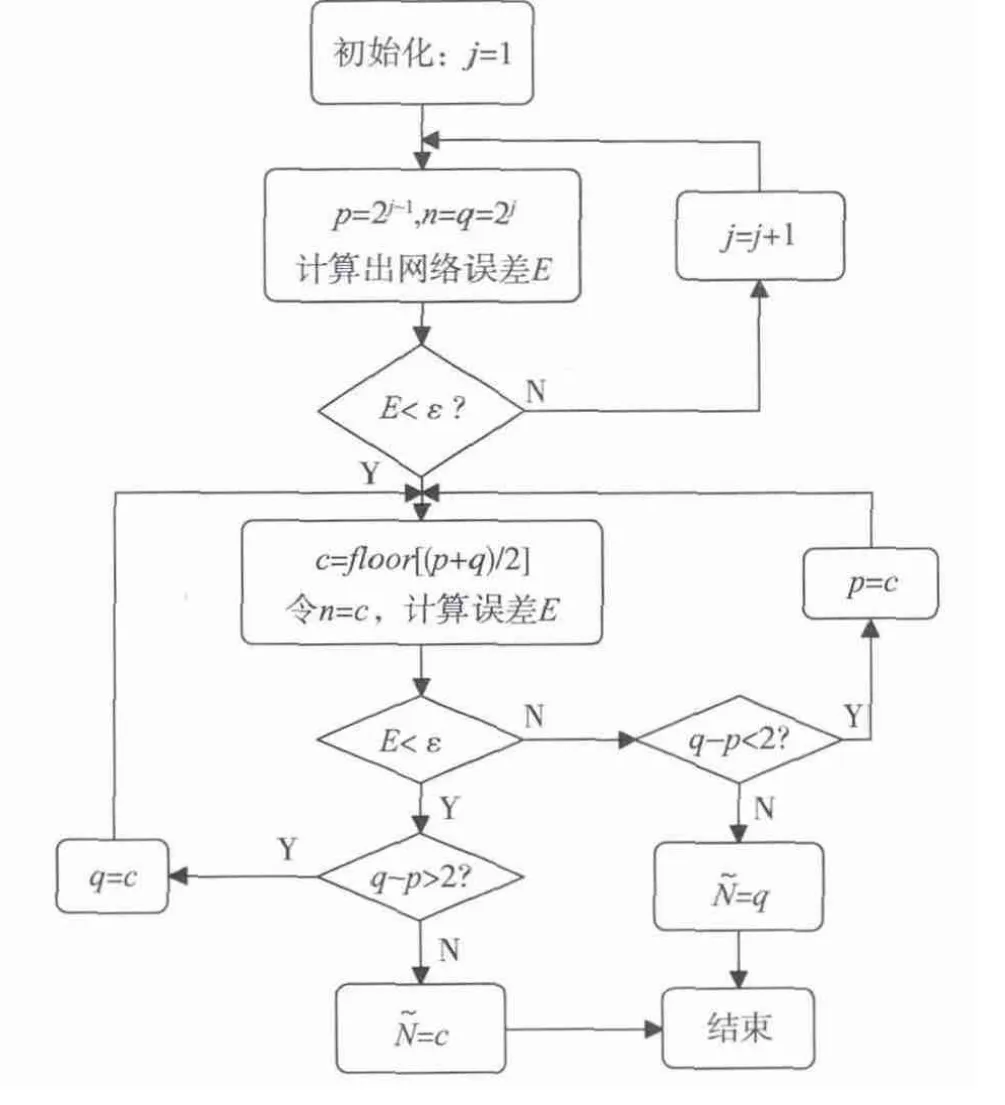
图1 隐层节点训练流程图
在确定隐层节点后,就可以来对遥感图像进行阴影检测了。首先选择训练集图像,在这里选择两类训练样本,第1类为阴影,第2类为非阴影,先将选取的样本图像进行直方图均衡化预处理,然后采用分块的方式,对每一小块分别提取能量、熵、对比度和逆差距4种纹理指数,即用1个四维特征向量作为1个样本输入点。实验选取了2×2,4×4,6×6,8×8的窗口大小,从实验结果来看,当窗口大小为4×4时实验效果好,将选择好的特征向量来训练ELM模型,然后将测试图像输入到训练好的ELM分类器,最后得到阴影检测结果图。
3 实验结果分析
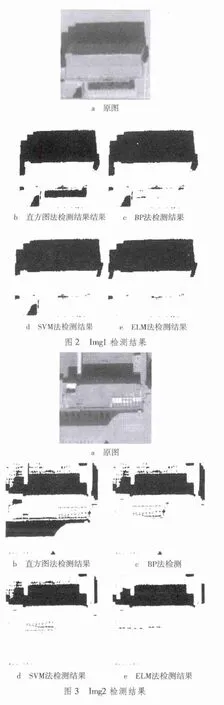
实验中采用从Google Earth上随机下载含阴影的遥感影像,然后利用ELM,BP,SVM和直方图阈值法实现了许多实际阴影检测,其中,ELM和BP的激励函数都选择“Sigmoid”函数,而SVM的核函数选择径向基函数,实验数据的输入一律归一化到[0,1]范围内,而输出则归一化到[-1,1]范围内,BP算法选择最快的Levenberg-Marquardt算法,SVM算法使用台湾Lin的libsvm工具箱。实验中所有算法都运行20次,结果取其平均值。由于篇幅限制,现只给出其中3幅图像的检测结果,为了更好地观察实验结果,将检测到阴影区域用黑色表示,非阴影区域用白色表示,见图2~图4。
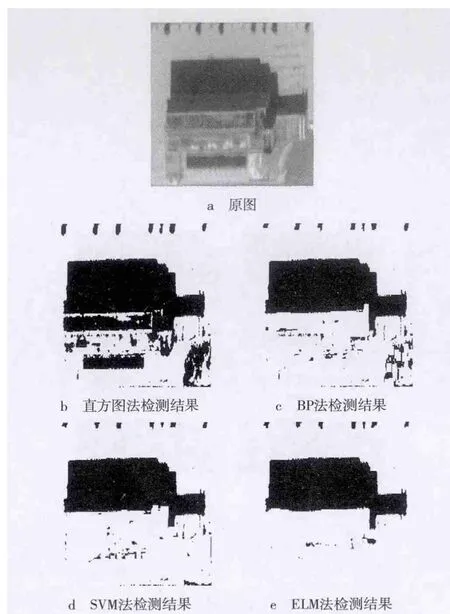
图4 Img3检测结果
本文采用Martel-Brinson提出的方法来对实验结果进行分析,主要采用DR和FR两个指标评估测试结果
式中:TN为正确识别阴影区域数目;FN表示将非阴影区域误判为阴影区域数目;FS表示未被检测到阴影区域数目;DR表示为阴影区域的正确检测率;FR表示为阴影区域的漏检率。当DR越大而FR越小时,证明检测方法是好的检测法。表2为ELM、BP、SVM和直方图阈值法4种检测法的DR、FR及测试时间的评估结果。在进行样本训练时,ELM算法用0.223 9 s得到训练误差均方根为0.003 5,SVM算法用0.441 0 s得到训练误差均方根为1.578 9,BP算法用127.370 8 s得到训练误差均方根为0.049 0。
通过实验结果可以看出,直方图阈值法容易将绿色草地和强反射性地物误检为阴影区域,BP和SVM法克服了这个缺陷,缺点是训练时间长,且参数选择复杂,容易出现过度拟合现象。相比较而言,ELM算法不仅克服了直方图阈值法遥感图像中草地、树木等区域的误判,在训练及测试速度和参数选择方面比传统机器学习法有很大进步,具有较高的正确检测率以及较小的漏检率,获得很好的泛化性能,从而提高了阴影检测的精度。
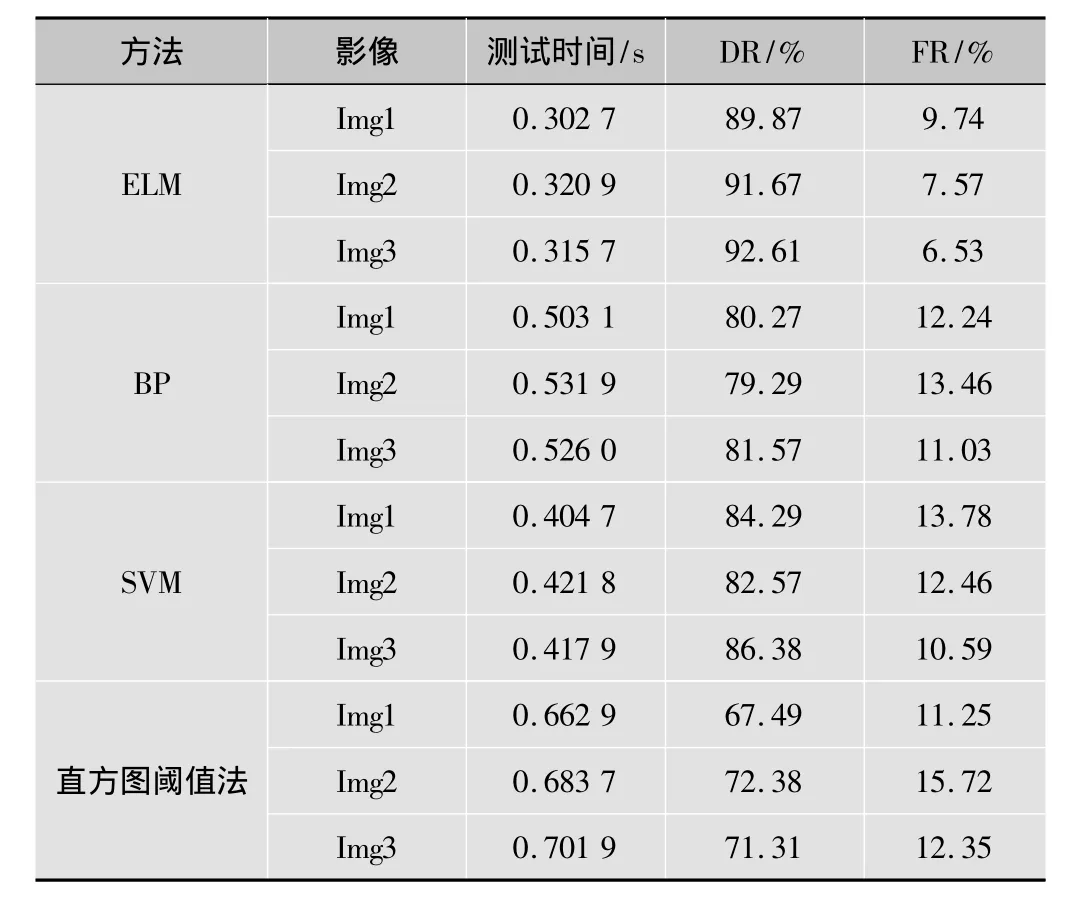
表2 3种方法的性能指标比较
4 结语
本文将辅以纹理特征的ELM算法模型用于阴影检测和提取,纹理信息可以定量地描述结构特征,反映图像灰度值的空间变化,实验表明窗口方向对实验结果影响不大,当窗口大小为4×4,步长为1时,能取得较好的实验结果。ELM算法可以对输入层权值和隐含层偏差赋随机值,涉及的计算量很小,算法简捷高效,得到的输出权值是全局最优的,很好地解决了神经网络训练和测试速度不理想的缺陷。下一步打算将纹理和光谱特征组合作为新的特征与ELM算法相结合来实现阴影区域的检测。
:
[1] YANG S,GREGORY N.Shadow detection and building-height estimation using IKONOS data[J].International Journal of Remote Sensing,2011,32(22):6929-6944.
[2] JIANG C,WARD M.Shadow identification[C]//Proc.1992 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Champaign,USA:IEEE Press,1992:606-612.
[3] JOSHI A J,PAPANIKOLOPOULOS N.Learning to detect moving shadows in dynamic environments[J].IEEE Trans.Pattern Analysis and Machine Intelligence,2008,30(11):2055-2063.
[4] CHOI J,YOO Y J,CHOI J Y.Adaptive shadow estimator for removing shadow of moving object[J].Computer Vision and Image Understanding,2010,114(9):1017-1029.
[5]许妙忠,余志惠.高分辨率卫星影像中阴影的自动提取与处理[J].测绘信息与工程,2003,28(1):20-22.
[6]张晓美,何国金.基于ALOS卫星图像阴影的天津市建筑物高度及分布信息提取[J].光谱学与光谱分析,2011,31(7):2003-2006.
[7]姜柯,李艾华,苏延召.结合边缘纹理和抽样推断的自适应阴影检测算法[J].西安交通大学学报,2013,47(2):39-46.
[8]高凯亮,覃团发,陈俊江,等.综合灰度和纹理特征的运动阴影检测方法[J].电视技术,2012,36(7):115-117.
[9] HUANG G,QIN Y,SIEW C.Extreme learning machine:theory and applications[J].Neurocomputing,2006,70(1):489-501.
猜你喜欢
浙江大学学报(理学版)(2022年4期)2022-07-25
文苑(2020年11期)2020-11-19
商洛学院学报(2020年4期)2020-07-08
软件(2020年3期)2020-04-20
中国诗歌(2019年6期)2019-11-15
人民珠江(2019年4期)2019-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
铁路计算机应用(2018年5期)2018-06-01
Coco薇(2017年8期)2017-08-03
中学生数理化·八年级物理人教版(2017年11期)2017-04-18