心中有爱 创意无限
2014-09-16 05:18
知识就是力量 2014年9期
知力记者







经过几次工业革命之后,机器在人类社会中占据了越来越重要的位置。在工业生产中,机器人可以有效完成很多工人很难完成的任务;在科研活动中,机器人探测器帮助科学家了解地球最隐秘的角落;在日常生活中,服务型机器人让生活更加轻松。最近已经出现了可以同步接收人类大脑信号的机器人,机械义肢的普及指日可待。科学家们对机器人的研发从未停止,而机器人爱好者们也在进行着自己的努力。这个夏天,来自全国各地的582名中小学生聚集在新疆,带着他们的心血之作,在第十四届全国青少年机器人大赛上一展风采。
本届大赛的主题是“激情创造·快乐成长”。比赛分为5个项目,分别是机器人综合技能比赛、机器人创意比赛、FLL机器人挑战赛、VEX机器人工程挑战赛和机器人足球比赛,其中最为抓人眼球的莫过于机器人创意比赛。本届机器人创意比赛的主题是“助老助残机器人”,选手们用他们令人惊叹的想象力和灵巧的双手,为我们呈现了一件又一件优秀的作品。
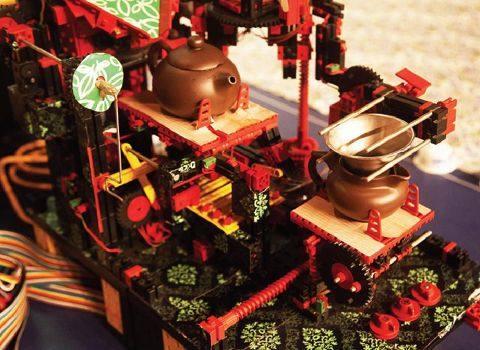
茶艺机器人
参赛团队:合肥市四十五中学
参赛学生:周颂之 陈音含 赵子睿
指导老师:宋蓓蓓 刘志国 李玲玲
“茶艺”这两个字,听上去就十分优雅,似乎和机械扯不上半点关系。在这次的机器人创意大赛上,有一队选手,就把这两项看起来不相干的东西结合了起来,于是我们就看到了这个作品——茶艺机器人。关于机器人制作的过程,参赛学生有很多心得。
我们通过实地观看茶艺表演,网上查找茶艺资料,对茶艺的过程有了一定的了解。茶艺的流程非常复杂,于是我们从中选取了几个最主要的过程让机器人来实现。
受到自动饮料机的启发,我们设置了三个触碰传感器来完成选茶功能。这也非常便于老年人、残疾人来操作。
在茶壶下安装丝杠,再在丝杠前后各装一个触碰传感器,这样可以限制茶壶前后到达的位置。待茶壶移到指定位置,旋转把手揭盖。我们事先将茶叶放入三个茶槽。机器人用一个茶槽盖将茶盖上,茶槽盖是否盖上也有相应的触碰传感器。机器人打开茶槽盖后,利用安装在底部的丝杠将选定的茶叶顶出茶槽。茶叶就会顺着斜坡,准确地投入茶壶中,最后将壶盖盖上。
齿条带动热水管下降,利用连通器的原理,将水注入茶壶中。为了能艺术地欣赏茶艺,我们安装了转盘,热水管一开始不在茶壶的上方,当需要热水时,转盘带动热水管转到茶壶上方。为更充分地洗茶,我们用齿轮加上连杆结构,齿轮转动,就可带动连杆上下移动,从而让茶壶也跟着左右摇晃。与此同时,茶海移动到茶壶下方,接到洗茶水,并把洗茶的水倒入废水器中。
有一首诗对泡茶的水温是这样写的:“蟹眼已过鱼眼生,飕飕欲作松风鸣。”通过向茶艺师咨询,我们了解到,不同的茶要想泡得好,所需的水温也不同,比如绿茶要用80摄氏度水来冲泡,才能体现绿茶“鲜、嫩、甘、滑”的特点;普洱茶,则要用100摄氏度的水冲泡,才可泡出茶的韵味。我们将水煮沸后,通过温度传感器检测温度,达到泡茶的合适温度,就往茶壶里注入热水。稍等片刻,泡好的茶就被倒入茶海中。
同样接受按钮操作,按一次倒一次茶,由于每倒一次茶,茶海里的水就会减少一些,所以在设定的4次沏茶中,茶海倾斜的角度依次增大。
将机器人小车的前端做成手捧形状,持有茶杯。通过碰撞茶艺机器人的传感器,由机器人接茶,并遥控给人们献茶。
超级老伙伴
参赛团队:杭州学军中学
参赛学生:余钟亮 徐可帅 夏舟杭
指导老师:沈晓恬
一些老年人由于行动不便,不能出去跟朋友逛街游玩,难免会觉得孤独。于是,富有爱心的同学们就发明了这款名叫“超级老伙伴”的机器人,帮助老年人无障碍地和自己的朋友沟通交流。在科技馆展览的现场,几位同学给我们详细介绍了他们的机器人。
在以往的制作经验中,我们亲身感受到了高度30厘米左右的小机器人对于任何人来说操作都是非常困难的,尤其是老年人这样不易弯腰的人群。经过多次试验,我们确定了最适宜普通老人操作的高度是90厘米。由此也确定了机器人的高度和基本框架尺寸。
为了简化开发、满足运算能力需求、满足交互需求,我们采用微软Surface Pro平板电脑作为主控制器,运行Java编写主程序和底层硬件交互层,通过一只USB Hub连接众多外围设备。与传感器通信主要采用Arduino Mega 2560开发板,通过串口,基于自有协议Mamata。
我们利用了铝型材设计并搭建了机器人的外框结构。为了满足灵活性,我们采用了全向轮,可以使机器人拥有3个自由度,完成平移和旋转。
为方便老人使用,我们参考了不少自然用户界面(NUI)相关文献,研究了红外触摸感应等技术。后来采用Kinect作为主要的交互方式,使老人只需在机器人周围即可通过手势操作机器人。
超级老伙伴的开发和制作过程都很复杂,大概用了6个月的时间。从板材的选用、搭建到编程、连接电路都是我们自己动手的。目前,这种伴侣型机器人的造价还很高,暂时还不能投入生产。不过我们相信,我们的这种设想会是一种很好的开端,在未来一定可以设计出更加适合老年人的机器人。
无臂人进餐器
参赛团队:陕西省陕县宁陕中学
参赛学生:刘飞 李弋
指导老师:廖泽松
对于我们身体健全的人来说,吃饭是很平常很简单的事情。可是对于没有手臂的残疾人,如果没有别人的帮助,独自进餐的难度很大。为了帮助他们,几位同学设计了这个小巧的机器人,让无臂残疾人也能够从容地吃饭。参赛同学边演示边为我们讲解了机器人的工作原理。
这个机器人的主体是我们学校老款的投影仪支架,我们把它拆下来进行了废物利用。我们设定了横轴纵轴的坐标,在这个空间里,这个机器人可以用勺子和叉子帮助残疾人吃饭。我们设计了两个不同的控制方法,面对不同程度的残疾人。
脚控式适合帮助缺失双臂但是双脚完好的残疾人,这样的残疾人一般可以用脚吃饭,但是在公共场合会让他们觉得有失体面,所以我们设计了这种脚控开关,可以把饭菜递送到嘴前。
另一种是颌控式,主要面向既缺失双臂又缺失双脚的残疾人。他们可以用下颌控制这个二维遥感仪,当使用久了之后,就能够熟练操作了。
因为身体不方便的缘故,残疾人吃饭通常会比较慢,往往吃到一半饭就凉了。所以我们特意加入了一个恒温装置,可以让饭菜保持一定的温度,不会很快冷掉。
为了节约残疾人的开销,我们把这个机器人的成本控制得很低,为两三百块钱,应该是他们可以接受的。
这里面所有零件都是我们自己做的,比较笨重,如果能投入生产,用数字化机床制作这些零件,机器人就会轻巧很多。
机器人赛事全知道
机器人综合技能比赛
主题:少年当自强
这项比赛是中国青少年机器人竞赛项目之一。参赛学生携带未拼装的器材入场,现场进行拼装、编程。运行程序后机器人在短时间内完成的任务越多,得分越高。
VEX机器人工程挑战赛
主题:梦想成真
比赛全称VEX Robotics Competition,同样是国际机器人竞赛项目。比赛为对抗形式,两支队伍各有两个机器人,包括自动时间和手动时间。基本原则是把尽量多的得分物品放在得分区域内,总得分多的一方获胜。
FLL机器人挑战赛 主题:天降之咎
这项比赛全称First LEGO League,是一项国际机器人比赛项目。参赛队员需要在比赛场地中现场制作并给机器人编程,完成不同的任务,同时还要进行相应的课题研究并完成研究报告。
机器人足球比赛
主题:足球世界杯
机器人足球比赛类似国际机器人足球赛事ROBO CUP,但规则上进行了一定调整,在比拼速度和力量的同时,更加强调比赛中的技术成分。比赛使用可发射红外线的圆球,机器人通过颜色和方向传感器辨别球在场地上的位置,通过红外传感器感应足球,并将足球推动或弹射到对方球门里。
猜你喜欢
金秋(2020年8期)2020-08-17
广东茶业(2019年2期)2019-06-18
小猕猴智力画刊(2017年12期)2017-12-27
幼儿教育·父母孩子版(2016年11期)2017-05-26
广东第二课堂·小学(2017年3期)2017-04-10
时代农机(2016年6期)2016-12-01
茶博览(2016年10期)2016-11-16
环球时报(2016-07-12)2016-07-12
浙江人大(2014年6期)2014-03-20
儿童时代·幸福宝宝(2009年3期)2009-04-16