大柔性灵巧手指弯曲仿真研究*
2014-09-15 09:23:26张建超杨庆华邵铁锋鲍官军
机电工程 2014年2期
张建超,杨庆华,邵铁锋,鲍官军
(浙江工业大学 特种装备制造与先进加工技术教育部/浙江省重点实验室,浙江 杭州 310032)
0 引 言
作为机器人与目标物体相互作用的最后环节和执行部件,末端执行器对于机器人智能化水平和作业水平的提高具有重要意义[1]。末端执行器是机器人的重要构成部件,传统机器人的末端执行器被用于完成一些简单的操作,如焊接、喷漆、装配等,但由于这种末端执行器结构简单、运动形式单一、自由度少、抓取稳定性差、灵活性不足,在很大程度上制约了现代机器人技术的进一步发展[2]。
气动柔性关节[3]是在现代机器人对安全性、柔顺性和舒适性提出更高要求的前提下而发展出来的一种新型气动末端执行元件。与传统末端执行元件相比具有许多无可比拟的优点,如:既是驱动器也是执行器,可以直接驱动,无需传动装置与减速装置、运动自由度多、运动平滑无摩擦、功率重量比大等等。所以气动柔性关节目前已成为气动末端执行器研究与开发的热点之一[4],最典型的代表就是美国原子物理学家McKibben设计的McKibben驱动器[5-8]。近年来,国内各大院校也纷纷开始着手研究气动柔性关节,吉林大学耿德旭等人[9]设计了双向主动弯曲气动柔性关节,浙江理工大学王龙辉等人[10]也提出了一种气动柔性驱关节,将两个气动柔性驱动器并联以起到相互对抗作用来驱动关节,并以此为基础设计了一种7自由度气动人工肌肉机械手臂。
大柔性灵巧手指是浙江工业大学提出的又一种新型气动柔性末端执行器,本研究就手指弯曲特性进行ANSYS仿真分析与实验研究。
1 大柔性灵巧手指结构及工作原理
大柔性灵巧手指结构及工作原理如图1所示。图1中,当通过有孔端盖4将压缩气体通入手指内腔时,由于螺旋弹簧3的约束作用,橡胶管2不会产生径向膨胀,同时由于薄弹簧钢片6的约束作用,橡胶管2在厚壁侧不会产生轴向伸长量,而越靠近薄壁侧轴向伸长量越大,于是手指向厚壁侧方向弯曲,弯曲角度随着手指内腔压力增大而增大;当释放手指内腔压缩气体时,由于橡胶管2、螺旋弹簧3及薄弹簧钢片6的作用,橡胶管恢复至初始状态。

图1 大柔性灵巧手指结构及工作原理图
2 大柔性灵巧手指弯曲仿真分析
文献[11]在结合了静力平衡与力矩平衡原理的情况下推导出手指转角静态模型,给出了手指弯曲角度θ关于手指变量的求解公式[11],并通过Matlab仿真得到手指弯曲角度θ与内腔压力P之间的关系曲线,如图2所示。

图2 手指内腔压力与弯曲角度曲线(Matlab仿真)
通过文献[12]及大柔性灵巧手指工作原理可知,当压缩气体充入手指内腔时手指发生弯曲,产生的效果可以等效为在手指自由端施加弯矩,即可以将手指视为自由端受弯矩的悬臂梁[13]。手指内腔压力与弯矩关系如表1所示。

表1 手指内腔压力与弯矩等效关系
这里需要指出,本研究分析手指弯曲时忽略手指自重影响[14];当手指内腔压力为0.1 MPa时,手指并未充入压缩气体,手指所受为大气压强,所以等效弯矩为0 N/m。
在ANSYS软件中,仿真弯矩与手指弯曲角度的关系,即手指仿真参数如表2所示。单元类型选择为BEAM189梁单元,根据仿真参数建立梁的分析模型,约束加载采用的是一端施加全约束,另一端施加弯矩差。
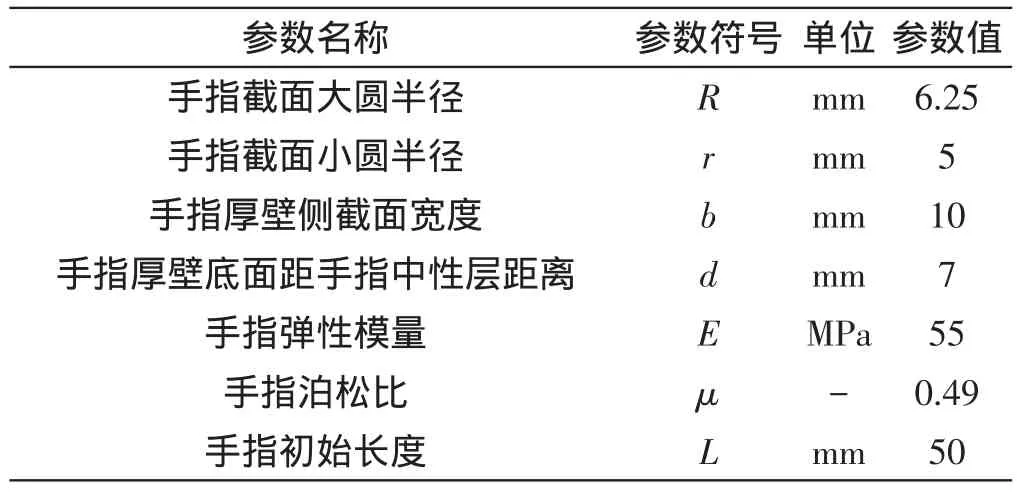
表2 大柔性灵巧手指仿真参数
在后处理模块中,通过选择查看弯曲角度,几张仿真结果图如图3所示(图中所示角度值为弧度制)。的方式,设置好载荷步后求解分析。这里要特别强调的是,由于手指弯曲角度可能会比较大,分析时需要打开大变形分析选项,否则分析结果将会产生较大误

图3 不同手指内腔压力弯曲效果图
通过整理仿真数据可得大柔性灵巧手指弯曲角度θ与内腔压力P之间的关系曲线(ANSYS仿真)如图4所示。将图4与图1比较可以发现,曲线走势基本吻合,从图中可以看出,随着手指内腔压力增大,弯曲角度也逐渐增大,且成指数增长趋势,当手指内腔压力为0.5 MPa时,手指弯曲角度为89.5°,接近于90°。

图4 手指内腔压力与弯曲角度曲线(ANSYS仿真)
3 大柔性灵巧手指弯曲实验研究
大柔性灵巧手指实验原理图如图5所示。

图5 手指弯曲特性实验原理图
空气压缩机输出压缩气体,其最高压力可达0.8 MPa,贮气容积为0.26 m3;过滤减压阀用来过滤空气并降低气体压力,过滤精度是5 μm,其最高可控压力为1 MPa,调压范围是0.05 MPa~0.85 MPa;油雾分离器可以净化压缩空气,避免颗粒尘埃进入下游工作回路和手指内腔中,其过滤精度是0.3 μm,最高压力为1 MPa;电气比例阀自带压力传感器与控制回路,用来调节输入电压与输出气压的比例关系;PCL-812PG数据采集卡具有2路D/A,16路A/D,12位分辨率,通过D/A输出电压信号,用以控制电气比例阀,从而改变手指的内腔压力,同时利用A/D转换通道检测比例阀的压力反馈信号,实现半闭环控制;单向弯曲角度传感器FLX-03 A用来测量手指的弯曲角度,通过嵌入式处理器处理数据,并且以CAN总线方式传送给工控机;工控机负责实验系统的整体控制。
大柔性灵巧手指的实物图与仿真图如图6所示。
本研究将实验数据整理分析,通过Matlab软件可得手指弯曲理论曲线与实验曲线的对比图如图7所示。由图7可知,手指仿真曲线与手指充气过程曲线比较吻合,由于手指放气过程有一个滞后环节,所得到的曲线偏差相对较大。
笔者所研究的大柔性灵巧手指由于受到一些实际条件的限制,手指承压能力有限,在实验研究中发现手指所能承受的最高内腔压强为0.6 MPa左右,主要原因是:
(1)手指材料为橡胶材料,为了满足易变性且弹性好等实际要求,手指弹性模量比较小,大角度弯曲时薄壁侧拉伸长度比较大,容易产生应力屈服,如图6(c)所示;
(2)目前是采用硅橡胶等粘接剂接合手指端盖与手指,实验时发现接合部位也容易产生应力集中,造成端盖脱离。

图6 大柔性灵巧手指实物

图7 仿真与实验曲线对比图
观察图6(b)也可以发现,手指弯曲并不仅限于理论弯曲平面内,在弯曲平面法线方向上也有少量变形,那是由于手指受到制作工艺的限制,实际手指形态并不完全与理论模型相符,手指受力情况也并不一定是均匀分布,而且薄弹簧钢片也不能够完全起到限制手指侧向弯曲或扭转的作用。
4 结束语
本研究通过ANSYS仿真及实验研究很好地验证了大柔性灵巧手指转角静态模型的正确性,但同时也发现了手指的一些不足,现大致列举如下:①手指承压能力有限,导致手指抓取强度不高;②手指制作精度不够,抓取时存在定位误差;③相同模型的不同手指之间弯曲结果也存在一定误差。针对以上各点,在以后的研究工作中需不断改进,尽量完善。
(References):
[1]姜 力,蔡 鹤,皋刘宏.新型集成化仿人手指及其动力学分析[J].机械工程学报,2004,40(4):139-143.
[2]刘 杰,张玉茹.机器人灵巧手抓持分类器的设计与实现[J].机器人,2003,25(3):259-263.
[3]章 军,须文波,宋 浩.气动柔性关节的抓取机械手的受力分析[J].设计与研究,2006(8):35-37.
[4]李尚会,杨庆华,鲍官军,等.基于FPA的新型气动柔性球关节的研究[J].浙江工业大学学报,2009,37(6):662-666.
[5]CALDWELL D G,MEDRANO-CERDA G A,GOODWIN M J.Braided pneumatic actuator control of a multi-jointed manipulator[C]//IEEE International Conference on Systems,Man and Cybernetics.Piscataway,NJ,USA:IEEE,1993:423-428.
[6]CHOU C P,HANNAFORD B.Static and dynamic character⁃istics of McKibben pneumatic artificial muscles[C]//IEEE International Conference on Robotics and Automation.Pis⁃cataway,NJ,USA:IEEE,1994:281-286.
[7]CHOU C P,HANNAFORD B.Measurement and modeling of McKibben pneumatic artificial muscles[J].IEEE Trans⁃actions on Robotics and Automation,1996,12(1):90-103.
[8]TSAGARAKIS N,CALDWELL D G.Improved modeling and assessment of pneumatic muscle actuators[C]//IEEE International Conference on Robotics and Automation.Pis⁃cataway,NJ,USA:IEEE,2000:3651-3636.
[9]耿德旭.双向主动弯曲气动柔性关节及其在机械手中的应用[D].吉林:吉林大学机械工程学院,2011.
[10]王龙辉,金英子,朱红亮,等.七自由度气动人工肌肉机械手臂的设计及研究[J].浙江理工大学学报,2012,29(1):74-78.
[11]卢君宜,熊晓松,朱 东.正自由度采摘机械臂关节空间轨迹规划[J].轻工机械,2013,31(4):11-14.
[12]罗鑫远.大柔性灵巧手指特性研究[D].杭州:浙江工业大学机械工程学院,2012.
[13]徐 生.气动柔性手指的运动分析及其控制研究[D].杭州:浙江工业大学机械工程学院,2005.
[14]鲍官军.气动柔性驱动器FPA的特性及其在多指灵巧手设计中的应用研究[D].杭州:浙江工业大学机械工程学院,2006.
猜你喜欢
天然气与石油(2022年4期)2022-09-21 07:05:54
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
理化检验(物理分册)(2021年3期)2021-03-23 02:06:00
装备制造技术(2020年12期)2020-05-22 09:25:10
测控技术(2018年12期)2018-11-25 09:37:50
测控技术(2018年9期)2018-11-25 07:44:24
橡塑技术与装备(2018年17期)2018-09-01 06:59:26
橡塑技术与装备(2018年14期)2018-07-20 03:22:00
制造技术与机床(2017年9期)2017-11-27 02:13:45
自动化学报(2016年8期)2016-04-16 03:38:51