PMSM有效磁链滑模观测器及转矩精确控制
2014-09-12 11:17赵凯辉陈特放张昌凡何静黄刚
计算机工程与应用 2014年21期
赵凯辉,陈特放,张昌凡,何静,黄刚
1.中南大学交通运输工程学院,长沙 410075
2.湖南工业大学电气与信息工程学院,湖南株洲 412007
3.中南大学信息科学与工程学院,长沙 410075
PMSM有效磁链滑模观测器及转矩精确控制
赵凯辉1,2,陈特放1,3,张昌凡2,何静2,黄刚1,2
1.中南大学交通运输工程学院,长沙 410075
2.湖南工业大学电气与信息工程学院,湖南株洲 412007
3.中南大学信息科学与工程学院,长沙 410075
为了改善轨道交通永磁同步电动机转矩控制的性能,提出了一种改进的有效磁链滑模观测器,实现了永磁同步电动机的精确转矩闭环控制。采用有效磁链的概念,建立了基于有效磁链的内置式永磁同步电机数学模型;在α-β静止坐标系建立了有效磁链的滑模观测器,并基于滑模等值控制方法实现了有效磁链的观测,进而进行转矩的实时估算,以此和转矩给定值形成精确转矩闭环控制。通过仿真验证该方法的可行性和有效性。结果表明提高永磁同步电动机的转矩控制精度,改善了轨道永磁同步电动机控制系统的性能。该方法不仅适用于内置式永磁同步电机,而且适用于表贴式永磁同步电机。
永磁同步电动机;滑模观测器;有效磁链;转矩闭环控制
1 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)以其高效率、高功率密度、强过载能力等优点受到轨道交通牵引系统研发人员的高度重视,“节能、环保、经济”的永磁同步牵引系统已成为下一代轨道交通牵引传统系统的发展方向[1]。
轨道牵引驱动控制系统要求电机具有较宽的调速范围和较小的转矩脉动,整车控制系统要求电机控制系统转矩控制的精度在给定5%范围内[2]。因负载转矩的直接测量成本较高,并且受仪器精度和响应速度的影响较大,因而转矩在线观测是现实的解决方案。负载转矩的观测有直接计算法、全阶及降阶观测器、模型参考自适应法[3]和Kalman滤波器等[4]。
本文采用PMSM有效磁链的概念,建立了内置式永磁同步电机数学模型;结合滑模变结构控制[5-8]对系统参数摄动、外界扰动及数学模型不准确具有很好的鲁棒性的特点,在α-β坐标系中设计了一种观测永磁同步电机有效磁链的滑模观测器,利用观测的有效磁链估算电动机的转矩,和给定转矩形成转矩闭环控制,从而实现PMSM转矩的精确控制。该方法不仅适用于表贴式永磁同步电机(Surface Permanent Magnet Synchronous Motor,SPMSM),而且适用于内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor,IPMSM)。
2 基于有效磁链的IPMSM数学模型
2.1 PMSM数学模型
SPMSM在α-β坐标系的电流状态方程为:

式中uα、uβ为α-β坐标系定子电压分量(V);iα、iβ为α-β坐标系定子电流分量(A);ψrα、ψrβ为永磁体在αβ坐标系分量(Wb);Rs为定子电阻;Ls为定子等效电感,ωe为转子电角速度。
IPMSM在d-q旋转坐标系的电流方程和磁链方程分别为:

式中,Rs为定子电阻;id、iq分别为定子电流的d、q轴分量;ud、uq分别为定子电压的d、q轴分量;Ld、Lq分别为d、q轴电感;ψd、ψq分别为d、q轴定子磁链分量;ψr为转子永磁体磁链;ωe为转子电角速度。
将式(3)代入式(2),由于永磁体磁链变化相对于电流变化较为缓慢,即其变化率dψr/dt≐0,于是可得IPMSM在d-q旋转坐标系下的电流状态方程:
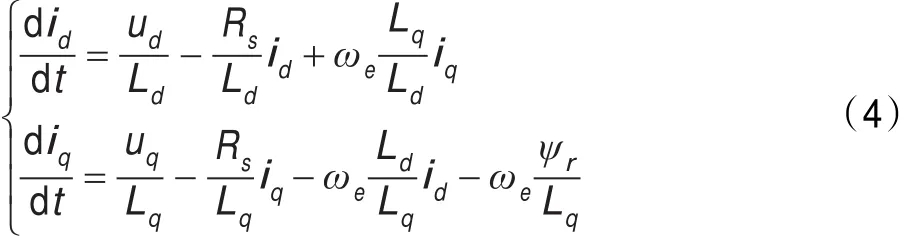
IPMSM的电磁转矩方程为:

2.2 有效磁链的概念
定义有效磁链(active flux)[9-14]为:

由式(8)可得有效磁链ψext在d-q旋转坐标系中分量为:

由式(9)可知有效磁链矢量ψext与d轴同向。如图1所示。

图1 有效磁链
由图1可知有效磁链ψext在α-β静止坐标系分量为:

2.3 基于有效磁链的IPMSM数学模型
把式(8)代入式(2),可得IPMSM电压方程[11]:

利用Park反变换将式(12)旋转变换至α-β静止坐标系中,可得:

由于IPMSM的机械系统时间常数远远大于电气系统时间常数,所以可得:

可见采用有效磁链概念的IPMSM电流方程(15)和SPMSM电流方程(1)具有同样的形式,该模型仅与定子电阻Rs和q轴电感Lq两个参数有关,消除了电机凸极现象,减少了IPMSM对直轴电感参数的依赖性。
3 有效磁链滑模观测器设计

3.1 滑模观测器的设计

式中K=kI,k>0,k为滑模切换增益。不连续开关特性将会引起系统的抖振,增加能量消耗。
在滑动模态控制中采用连续的Sigmoid函数代替传统的开关函数进行滑模变结构控制,可有效地减小传统滑模观测器带来的抖振现象,且减少了滤波环节。本文滑模观测器的控制输入量采用Sigmoid函数。

式中K=kI,k>0,k为滑模切换增益,k的值决定滑模观测器收敛于滑模面的速率。H(e)为Sigmoid函数,其
函数形式为[15]:

3.2 稳定性证明
为考察滑模观测器(17)的收敛情况,构造Lyapunov函数:

3.3 有效磁链观测及转矩估算
当滑模观测器进入滑动模态时,由滑模等值原理可知:

把式(29)代入误差动态方程(21)可得:

即可得到等效的有效磁链为:

把观测到的有效磁链代入式(7)即可得估计的转矩为:

4 仿真与分析
图2为基于有效磁链滑模观测器的永磁同步电机转矩闭环控制系统,采用=0控制策略。该控制结构中外环采用转矩闭环,给定的转矩与估计的转矩通过转矩调节器输出交轴给定电流。本文使用Matlab/ Simulink7.1仿真整个系统,所用大功率永磁同步电机牵引参数为:电阻Rs=0.02 Ω,定子电感Ld=0.002 H,Lq= 0.003 572 H,转子磁链ψr=0.892 Wb,转动惯量J=100,极对数np=4。
为验证观测器的鲁棒性,设置转矩给定值为500 N·m,在0.2 s增加为1 000 N·m。定子电阻初始值为0.02 Ω,在0.5 s增加为0.04 Ω。转子电角度设定为200 rad/s。
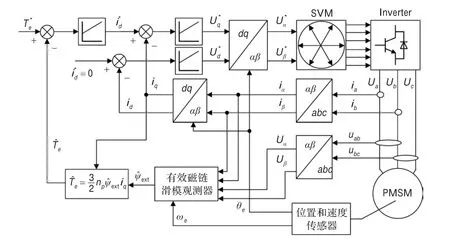
图2 永磁同步牵引电动机转矩闭环控制系统

图3 有效磁链观测值ext,α、ext,β,ext

图4 转矩给定值和观测值以及观测误差

图5 定子电阻实际值、观测值及误差
图4为转矩给定值和观测值以及观测误差,其中(a)图为改进的滑模观测器的转矩控制效果,(b)图为采用传统滑模观测器的转矩控制效果。从结果可以看出,改进的滑模观测器的转矩观测误差为4‰,满足转矩控制的精度在给定5%范围内的要求,而传统滑模观测器的抖振较大。
图5为定子电阻实际值、观测值及误差。其中(a)图为改进的滑模观测器定子电阻的跟踪效果,(b)图为采用传统滑模观测器的定子电阻的跟踪效果。从结果可以看出,改进的滑模观测器能较好跟踪定子电阻,而传统滑模观测器抖振较大。
仿真结果表明,采用Sigmoid函数改进的滑模观测器具有较高的观测精度和良好鲁棒性,转矩控制精度高。仿真结果验证了方法的可行性和有效性。
5 结论
采用有效磁链的概念,建立IPMSM的数学模型;利用滑模观测器对参数摄动、外界扰动及模型不准确具有鲁棒性的特点,在α-β静止坐标系中构建一种内置式永磁同步电动机的有效磁链滑模观测器;根据观测的有效磁链估算实际的转矩,以此和转矩给定形成精确转矩闭环控制,提高轨道交通驱动系统的转矩控制精度,改善了轨道交通控制系统的性能。该方法不仅适用于内置式永磁同步电机,而且适用于表贴式永磁同步电机。
[1]冯江华.轨道交通永磁同步牵引系统研究[J].机车电传动,2010(5):15-21.
[2]Sebastian T.Temperature effects on torque production and efficiency of PM motors using NdFeB magnets[J].IEEE Transactions on Industry Applications,1995,31(2):353-357.
[3]朱元,武四辈,吴志红,等.电动汽车用内置式永磁同步电动机精确转矩控制方法[J].农业机械学报,2014,45(1):8-13.
[4]郑泽东,李永东,肖曦,等.永磁同步电机负载转矩观测器[J].电工技术学报,2010,25(2):30-36.
[5]Zhang C F,Huang Y,Shao R.Robust sensor faults detection for induction motor using observer[J].Journal of Control Theory and Applications,2012,10(4):528-532.
[6]谭文,王耀南,黄创霞,等.永磁同步电机中混沌现象的滑模变结构控制[J].计算机工程与应用,2009,45(11):220-222.
[7]刘恒.永磁同步电动机混沌系统光滑二阶滑模控制[J].计算机工程与应用,2012,48(21):222-224.
[8]何静,张昌凡,贾林,等.一种永磁同步电机的失磁故障重构方法研究[J].电机与控制学报,2014,18(2):8-14.
[9]Boldea I,Paicu M C,Andreescu G D.Active Flux concept for motion-sensorless unified AC drives[J].IEEE Transactions on Power Electronics,2008,23(5):2612-2618.
[10]Boldea I,Paicu M C,Andreescu G D,et al.“Active Flux”DTFC-SVM sensorless control of IPMSM[J].IEEE Transactions on Energy Conversion,2009,24(2):314-322.
[11]周扬忠,毛洁.基于有效磁链概念的永磁同步电动机新型定子磁链滑模观测器[J].中国电机工程学报,2013,33(12):152-158.
[12]Hasegawa M,Yoshioka S,Matsui K.Position sensorless control of interior permanent magnet synchronous motors using unknown input observer for high-speed drives[J]. IEEE Transactions on Industry Applications,2009,45(3):938-946.
[13]Hasegawa M,Matsui K.Position sensorless control for interior permanent magnet synchronous motor using adaptive flux observer with inductance identification[J].IET Electric Power Applications,2009,3(3):209-217.
[14]刘家曦,杨贵杰,李铁才.基于线性磁链的IPMSM位置预估算法[J].哈尔滨工业大学学报,2011,43(6):81-85.
[15]Kim H,Son J,Lee J.A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J].IEEE TransactionsonIndustrialElectronics,2011,58(9):4069-4077.
ZHAO Kaihui1,2,CHEN Tefang1,3,ZHANG Changfan2,HE Jing2,HUANG Gang1,2
1.School of Traffic and Transportation Engineering,Central South University,Changsha 410075,China
2.School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou,Hunan 412007,China
3.School of Information Science and Engineering,Central South University,Changsha 410075,China
To improve the performance of the torque precision for PMSM(Permanent Magnet Synchronous Motor)of railway vehicles,a novel sliding mode observer of active flux and a precise torque control method are proposed for a vector control system of PMSM.The concept of active flux is adopted and the mathematical model of Interior Permanent Magnet Synchronous Motor(IPMSM)has been established.The sliding mode observer of active flux is constructed inα-βstator coordinate frame,and it is observed active flux by applying sliding mode equivalent control methodology,then it realizes the real-time estimation of torque.The precise torque closed-loop control system is constituted combining with the torque command. The simulation results verify the feasibility and effectiveness of the method.The torque control precision of the PMSM can be improved,and the driving performance of railway PMSM vehicles is fulfilled and guaranteed.This method is not only applicable to IPMSM but to Surface-mounted Permanent Magnet Synchronous Motors(SPMSM)as well.
Permanent Magnet Synchronous Motor(PMSM);sliding mode observer;active flux;torque closed-loop control
A
TM351
10.3778/j.issn.1002-8331.1403-0111
ZHAO Kaihui,CHEN Tefang,ZHANG Changfan,et al.Precise torque control and active flux sliding mode observer for Permanent Magnet Synchronous Motor.Computer Engineering and Applications,2014,50(21):19-23.
国家自然科学基金(No.61273157,No.61104024,No.61273158);湖南省自然科学基金(No.14JJ5024)。
赵凯辉(1973—),男,博士生,副教授,研究领域为电力牵引与传动控制;陈特放(1957—),男,博士,教授,博士生导师,研究领域为电力牵引与故障诊断;张昌凡(1960—),男,博士,教授,研究领域为非线性控制及应用;何静(1971—),女,博士,教授,研究领域为机电系统和工业过程控制;黄刚(1979—),男,博士生,讲师,研究领域为现代控制理论及其在电力电子系统中的应用。E-mail:zkeen@126.com
2014-03-11
2014-06-03
1002-8331(2014)21-0019-05
猜你喜欢
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年19期)2015-04-09
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04