大射电望远镜馈源舱系统Stewart平台的技术研究
2014-09-08 10:14李建军王宇哲贾彦辉段艳宾
电子机械工程 2014年4期
李建军,王宇哲,贾彦辉,段艳宾
(中国电子科技集团公司第五十四研究所, 河北 石家庄 050081)
大射电望远镜馈源舱系统Stewart平台的技术研究
李建军,王宇哲,贾彦辉,段艳宾
(中国电子科技集团公司第五十四研究所, 河北 石家庄 050081)
FAST大射电望远镜以中科院国家天文台为研制总体,其Stewart平台作为馈源舱内部接收机平台的精调机构,用于减少和抑制整个馈源舱的风激扰动影响,并对馈源运动轨迹进行精调定位。基于目前馈源舱系统的设计输入,完成了Stewart平台的构型选择和参数确定,进而分别从下平台、上平台和伸缩支杆三方面进行Stewart平台的详细结构设计。在结构设计的基础上,利用有限元分析软件ANSYS分别对下平台、上平台和伸缩支杆进行了力学分析。结果表明,该Stewart平台满足设计需求。
大射电望远镜;Stewart平台;馈源舱;力学分析
引 言
为满足射电天文研究的需求,我国将在贵州省平塘县大窝凼洼地建设500 m口径球面射电望远镜(Five hundred meter Aperture Spherical radio Telescope),简称 FAST[1]。FAST 望远镜采用了独特的柔索拖动约30 t重的馈源舱在反射面上方馈源焦面内缓慢运动,以便馈源舱内馈源接收机主动跟踪反射面焦点的位置变化,使得舱内承载的馈源接收机能够在焦点位置接收来自遥远太空的天体电波信号,该跟踪方式突破了传统射电望远镜中馈源接收机与反射面相对固定的简单刚性支撑模式[2-4]。
FAST望远镜的馈源系统,采用了悬索驱动的无平台支撑方案,其内部由三级调整机构串联组成。
1)第一级:通过悬索牵引系统,完成馈源舱在直径200 m区域内的轨迹控制,星型框架的倾斜角度可达±25°。
2)第二级:通过AB轴机构实现±15°转角功能,补偿一级索驱动无法达到的馈源姿态角度。
3)第三级:通过Stewart平台精调机构,减少和抑
制整个馈源舱的风激扰动影响,并对馈源运动轨迹进行精调定位,保证其小于10 mm的位置精度[5-7]。
FAST馈源舱作为馈源接收机等有效载荷的安装平台[8],如何实现馈源接收机较高精度的定位和位姿控制要求是目前馈源舱方案研究和设计中的一项紧迫任务。
1 Stewart平台的构型选择
馈源舱作为FAST天文观测设备(馈源接收机)支撑机构,内部由星型框架、AB轴机构、Stewart平台自上而下串联而成,外加防护罩,以满足馈源舱各种设备的防雨、防尘等要求。Stewart平台作为馈源接收机的精调机构,是FAST望远镜的核心部件[9-10],如图1 所示。
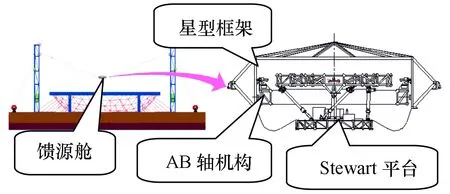
图1 馈源舱结构组成
Stewart平台性能指标如下:
1)一级索驱动控制精度(中心点为A、B轴交点)为空间位置误差≤72 mm,空间姿态误差≤1°;
2)对Stewart下平台的任意点均可实现矢量控制,空间位置误差≤10 mm,空间姿态误差≤0.5°;
3)下平台有效载荷为2 500 kg;
4)Stewart平台的伺服谱带宽应小于索驱动机构的一阶固有频率0.18 Hz。
Stewart平台是并联机构中的经典构型,自由度性质明确,理论分析透彻,应用广泛,技术成熟。Stewart平台通过6个独立的开环运动链连接上、下平台组成闭环,以并联方式实现对下平台的驱动,具有6个自由度。Stewart平台的优点包括:
1)机械零部件主要由滚珠丝杠、虎克铰、球铰、伺服电机等通用组件组成,数目较串联机构大幅减少,结构简单,可靠性高;
2)采用封闭性结构,负荷流线短,且负荷分解的拉、压力由多个二力结构连杆同时承受,应力与变形较小,故其结构刚度大,承载能力强,静态误差小,刚度重量比远高于传统的串联机构;
3)各可伸缩杆杆长均能单独对动平台的位置和姿态起作用,不存在误差累积和放大的现象,加之结构对称,故运动精度高。
Stewart平台的劣势在于其工作空间较小,在工作空间上有奇异点的限制,而且控制较为复杂。
FAST望远镜的馈源接收机重量大、馈源舱空间有限、调整范围相对较小,因此要求精调机构刚度高、重量轻、结构紧凑、响应快速、定位精度高、可靠性高。
馈源舱悬索控制系统具有多变量、非线性、多体动力学耦合等特点,为了达到理想的控制效果,必须尽量减少各机构之间的耦合程度。Stewart平台作为一种小质量、大刚度、高精度的并联机构,其负载(下平台+接收机)重量与馈源舱总重量之比接近1∶10,有利于降低耦合影响。Stewart平台的6个驱动腿都是沿着长度方向做伸缩运动,轴向力的测量和计算比较容易,可以准确计算耦合影响。因此,采用Stewart平台实现馈源舱的二级精调,能够充分发挥其优点而避免其不足。
2 Stewart平台的工作原理
Stewart平台采用关节控制策略,其输入为下平台当前位姿、下平台期望位姿,输出为6条伸缩支腿的长度。
控制系统以工控机和运动控制器为基础,面向用户需求开发应用软件;采用工控机运行系统程序,负责人机界面和其他管理工作;以运动控制卡为伺服系统发送指令,实现机构细节的运动控制;通过伺服电机驱动滚珠丝杠实现各分支的移动,进而实现馈源接收机的位姿调整;在伸缩支杆上安装位移传感器,采集杆件行程信息并反馈给工控机以实现位置闭环,如图2所示。
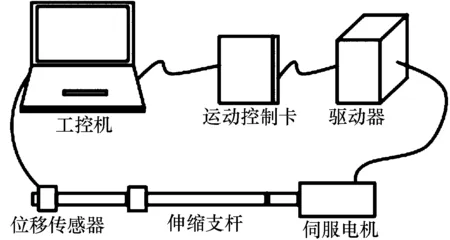
图2 Stewart平台控制原理
Stewart平台工作流程如下:
1)定义上平台坐标系、下平台坐标系、大地坐标系以及三者之间的相互关系;
2)通过外部测量确定初始时刻下平台坐标系在大地坐标系中的位姿;
3)根据虎克铰在上平台坐标系中的坐标值、球铰在下平台坐标系中的坐标值以及初始杆长,求出上平台坐标系在大地坐标系中的位姿;
4)控制系统输入下一时刻下平台坐标系在大地坐标系中的位姿;
5)根据上一步求出的上平台坐标系在大地坐标系中位姿、下一时刻下平台坐标系在大地坐标系中位姿以及当前杆长,计算6条伸缩支腿的杆长变化量,控制系统将下平台驱动到下一时刻的理论位姿;
6)通过外部测量确定该时刻下平台坐标系在大地坐标系中的实际位姿,与理论位姿比较,并反馈到控制系统,进行误差修正。
3 Stewart平台的详细设计
3.1 Stewart平台的参数定义
Stewart平台机构简图见图3,上、下平台各铰点1、3、5和2、4、6分别以120°间隔均匀分布。Stewart平台机构参数包括:上、下平台间初始高度h,上平台铰链中心点分布圆半径R,下平台铰链中心点分布圆半径r,铰链点间夹角θ1、θ2、Φ1、Φ2和初始杆长L。
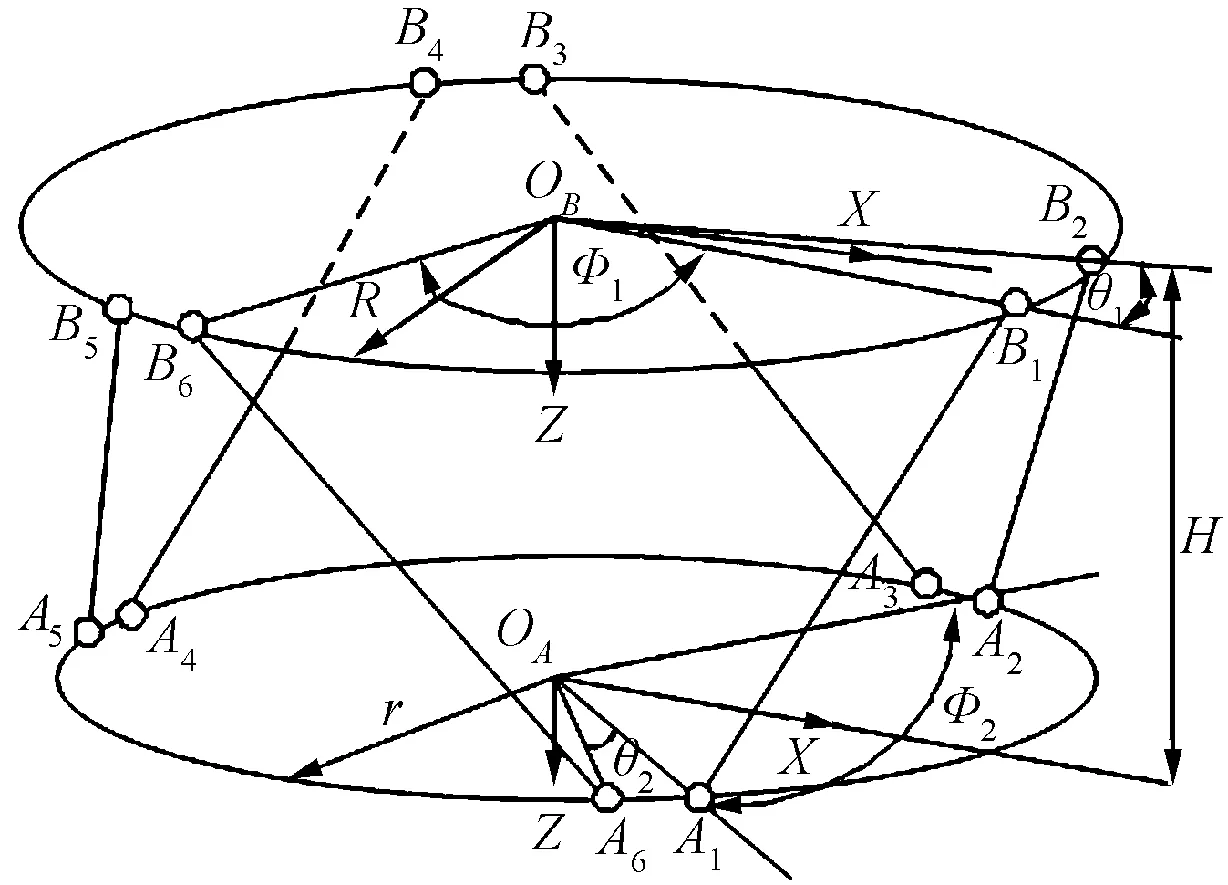
图3 Stewart平台机构简图
根据馈源接收机的外形尺寸及分布需求,确定机构初始高度及上、下平台铰点半径的搜索范围。以杆长为设计变量,以下平台运动空间为限制条件,以各杆在全姿态工作空间内受力最小为优化条件,搜索最优构型,确定Stewart平台机构参数:R=3400mm,r=2 150 mm,h=2 000 mm,α=20°,β=20°。

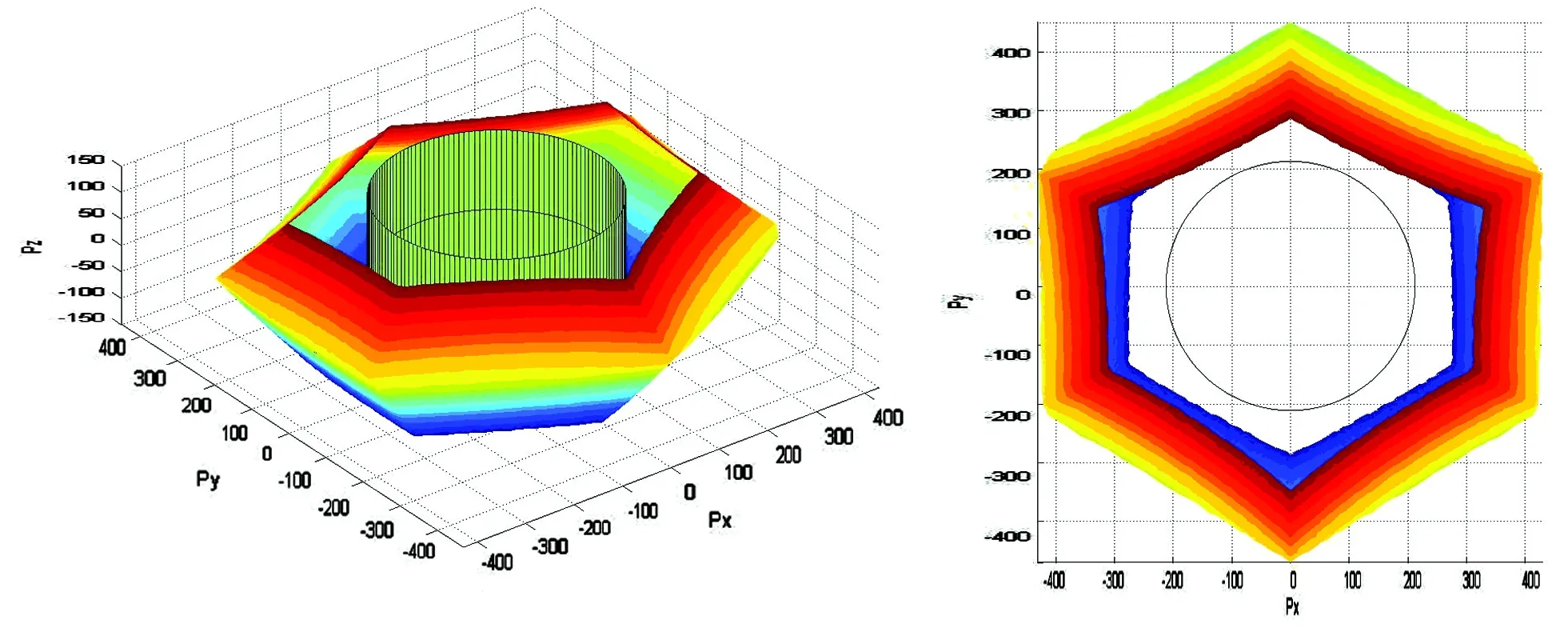
图4 下平台工作空间
3.2 Stewart平台的结构组成
Stewart平台主要由上平台、下平台、伸缩支腿、球铰、虎克铰等部分组成,如图5所示。
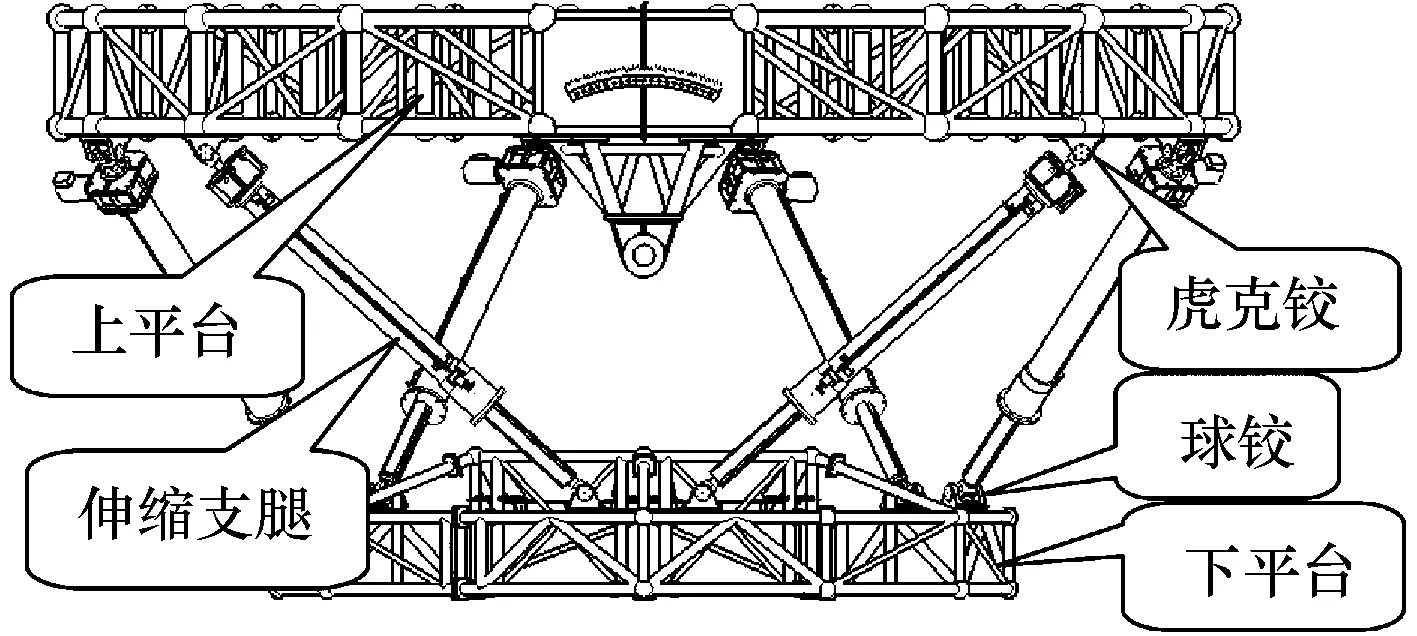
图5 Stewart平台结构组成
(1)上、下平台
上平台作为Stewart平台的支撑基础,向上通过B轴转轴与AB轴转环连接,向下通过虎克铰连接6根相同的伸缩支腿。
下平台作为Stewart平台的执行部件,用以安装馈源接收机、靶标支座以及绕自身旋转的多波束馈源转盘。下平台通过球铰连接6根相同的伸缩支腿。
为了减轻重量,结合铰链分布、安装空间、结构刚度等因素,上、下平台均采用桁架结构焊接而成。上平台外形尺寸为Φ 6 600 mm × 700 mm,重量约2 500 kg,下平台外形尺寸为Φ 4 200 mm × 800 mm,重量约1 000 kg。
(2)球铰、虎克铰
虎克铰(图6)是连接伸缩支腿和上平台的构件,具有2个旋转自由度,可以绕X、Y两轴旋转。虎克铰以法兰形式与连接箱体相连,主要由摆动杆、摆动块和底座3部分组成。摆动杆通过滚针轴承支承在摆动块上,摆动块再通过滚针轴承支撑在底座上,两转轴摆角分别可达90°和45°。
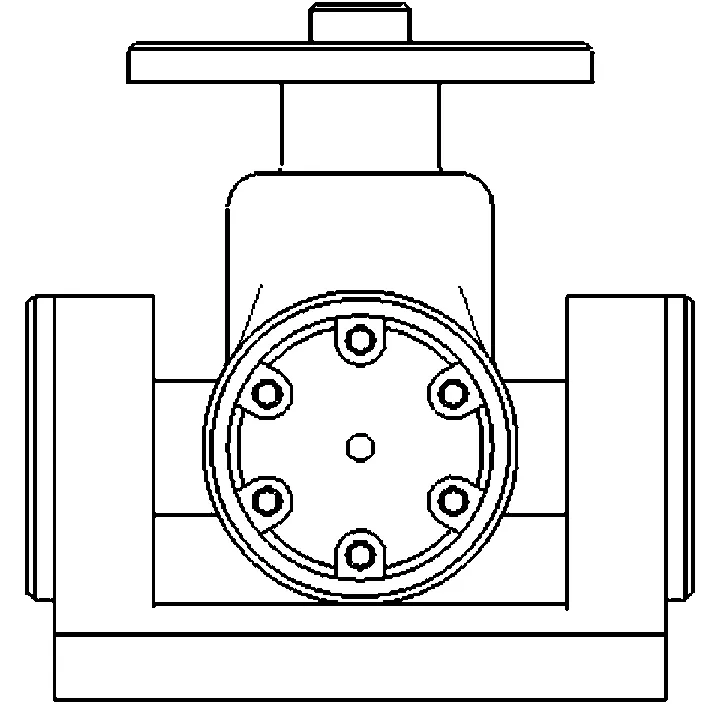
图6 虎克铰
球铰(图7)是连接伸缩支腿和下平台的构件,具有3个旋转自由度。球铰是在虎克铰的基础上设计完成,即在虎克铰摆动杆上端增加一个组件,使虎克铰可绕中心轴线做360°旋转,从而实现第3个旋转自由度。
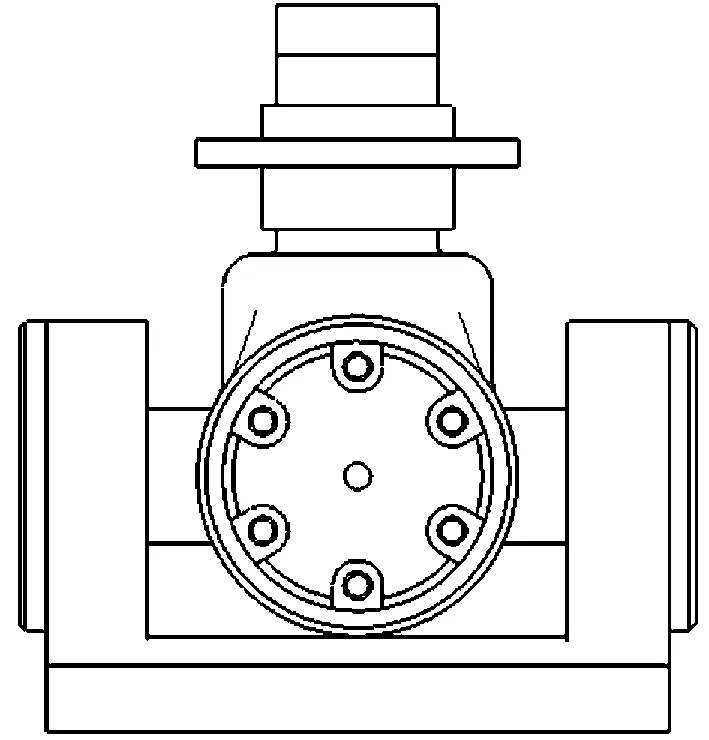
图7 球铰
(3)伸缩支腿
伸缩支腿是Stewart平台的运动输入构件,由虎克铰、驱动单元、套筒、滚珠丝杠、滚珠花键、球铰等部分组成,通过滚珠丝杠的伸缩实现下平台位置和姿态的变化,如图8所示。
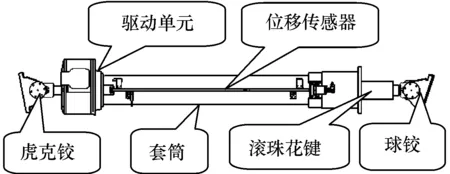
图8 伸缩支腿结构组成图
伸缩支腿的两端分别连接虎克铰与球铰,中间安装位移传感器实时反馈支腿的行程信息,其长度的变化决定了下平台的运动速度、加速度、位置和姿态变化。电机通过减速器驱动滚珠丝杠旋转,丝杠螺母滚珠花键连接。由套筒与滚珠花键共同组成直线导向运动单元,确保旋转与平移运动转化的可靠、顺畅、无迟滞。滚珠花键轴为空心形式,内部容纳丝杠,并以螺纹形式与球铰相连。
3.3 Stewart平台的力学分析
3.3.1 上下平台刚度分析
采用有限元软件对上、下平台进行刚度、尺寸、重量的分析和优化设计,实体选用梁单元。下平台约束为六杆的6个约束点,负载为馈源接收机重量共计2 500 kg,均匀加载到内环的6个节点上;上平台约束为AB轴转环的两端,负载为下平台及六杆的重量共计5 000 kg,均匀施加在上平台的6个铰链点上。
对上、下平台进行各种工况下的刚度分析,可以看出:水平0°时上、下平台变形最大,其中下平台变形量为1.1mm,出现在六边形框架上;上平台变形量为2.3 mm,出现在远离约束点的内、外圈的辅助梁上,如图9、图10所示。
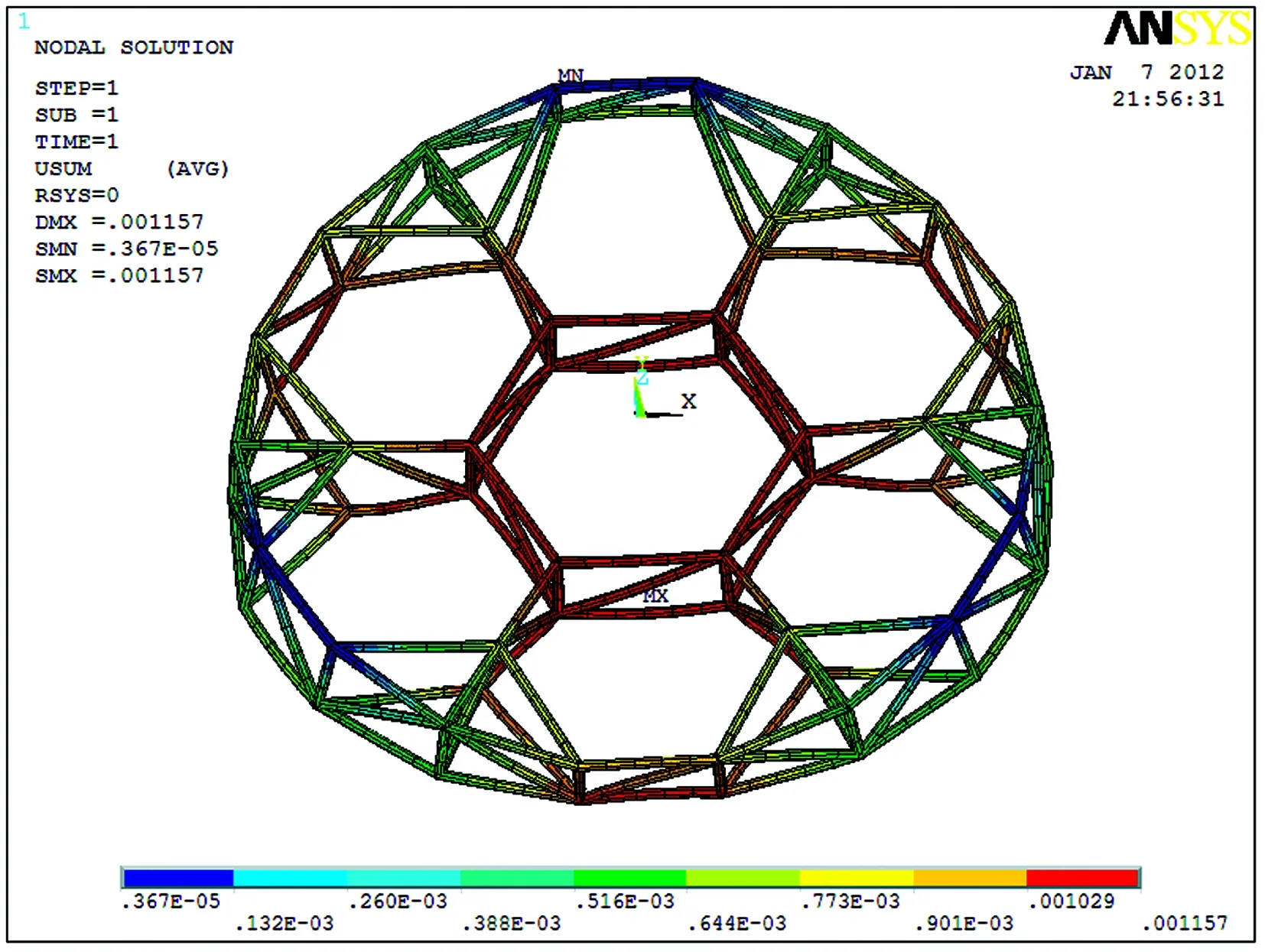
图9 下平台变形图
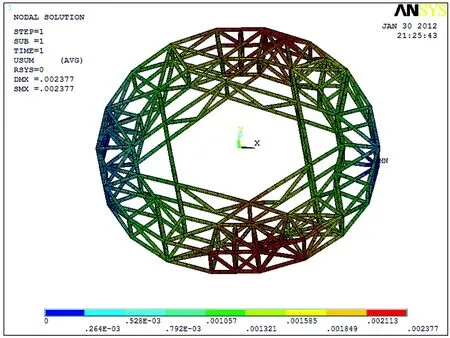
图10 上平台变形图
3.3.2 伸缩支杆刚度分析
在星型框架25°,A、B轴均为15°位姿,下平台做匀速圆周运动时,伸缩支杆受力最大为17 600 N。建立伸缩支杆的有限元模型,并施加17 600 N轴向力,伸缩支杆在最大伸长量情况下变形最大为0.13 mm,最大应力为88.823 MPa,如图11、图12所示,满足Stewart平台控制精度对结构刚度的要求。
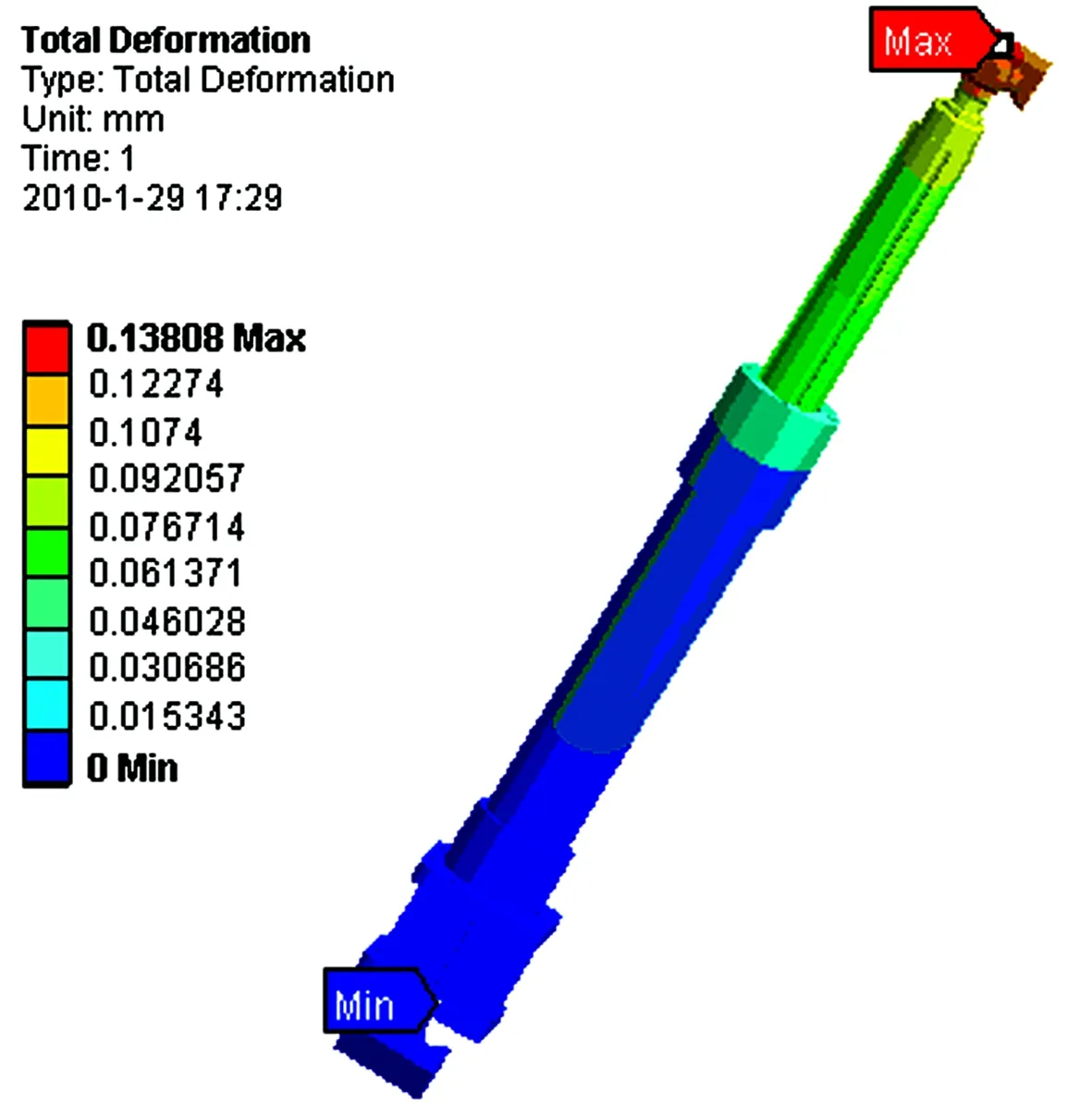
图11 伸缩支杆变形图
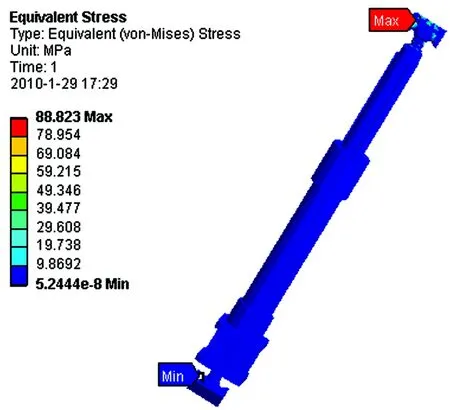
图12 伸缩支杆应力图
4 结束语
本文在前期概念设计的基础上,针对馈源舱方案设计的工作原理、技术参数、功能要求,结合馈源舱的性能指标、使用环境、使用条件等,对Stewart平台从机构、结构以及控制等方面进行了全面的技术分析、优化设计及论述,为下一步详细设计提供了技术依据。
[1] NAN R D. Five hundred meter aperture spherical radio telescope (FAST)[J]. Science in China Series G: Physics, Mechanics & Astronomy, 2006, 49(2): 129-148.
[2] 南仁东. 500 m球反射面射电望远镜FAST[J]. 中国科学G辑, 2005, 35(5): 449-466.
[3] 朱文白. FAST望远镜天文规划和馈源支撑的相关研究[D]. 北京:中国科学院研究生院, 2006.
[4] DUAN B Y. A new design project of the line feed structure for large spherical radio telescope and its nonlinear dynamic analysis[J]. Mechatronics, 1999, 9(1): 53-64.
[5] QIU Y H. A novel design for a giant Arecibo-type spherical radio telescope with an active main reflector[J]. Monthly Notices of the Royal Astronomical Society, 1998, 301(3): 827-830.
[7] QIU Y Y. Model analysis and experimental research on the feed tracking system of large radio telescope[D]. Xi′an: Xidian University, 2002.
[8] 董杰. 大射电望远镜AB轴平台控制系统软件设计及开发[D]. 西安:西安电子科技大学, 1986.
[9] 段宝岩, 苏玉鑫, 仇原鹰,等. 新一代大射电望远镜机电光一体化设计研究[J]. 中国机械工程, 1999(9): 1002-1004.
[10] 苏玉鑫. 大射电望远镜精调Stewart平台的优化、分析与控制[D]. 西安: 西安电子科技大学, 2002.
李建军(1970-),男,高级工程师,主要研究方向为天伺馈系统结构设计。
贾彦辉(1984-),男,工程师,硕士,主要研究方向为天伺馈系统结构设计与FAST馈源舱系统力学分析。
Technology Research of Stewart Platform in Large Radio Telescope Feed Cabin
LI Jian-jun,WANG Yu-zhe,JIA Yan-hui,DUAN Yan-bin
(The54thResearchInstituteofCETC,Shijiazhuang050081,China)
Large radio telescope FAST has National Astronomical Observatory of Chinese Academy of Sciences as overall development, its Stewart platform is the fine level adjusting mechanism of interior receiver platform in feed cabin, and is used to reduce the wind excitation disturbance of the feed cabin and to adjust precisely the position of the motion trajectory of the feed cabin. Based on the design input of current feed cabin system, the structure configuration selection and the parameter determination of the Stewart platform are completed. Then, the detailed structure design of the Stewart platform is carried out from the three aspects of bottom platform, top platform and telescopic strut. Based on the detailed structure design, the mechanical analysis for the bottom platform, the top platform and the telescopic strut are performed using finite element analysis software ANSYS. Analysis results indicate that the Stewart platform meets the design requirements.
large radio telescope; Stewart platform; feed cabin; mechanical analysis
2014-03-06
国家自然科学基金资助项目( 51205339)
TN16
A
1008-5300(2014)04-0019-05
猜你喜欢
航天器环境工程(2022年1期)2022-03-11
实验流体力学(2022年6期)2022-02-06
科技传播(2019年22期)2020-01-14
制造技术与机床(2019年11期)2019-12-04
科教新报(2019年16期)2019-09-10
科学导报(2019年24期)2019-09-03
华东理工大学学报(自然科学版)(2017年5期)2017-11-01
护理实践与研究(2016年12期)2016-10-31
发明与创新(2016年22期)2016-10-13
发明与创新·中学生(2016年6期)2016-05-14