雷达红外多模复合制导对抗试验方法
2014-09-08 12:25高文静
雷达与对抗 2014年4期
贺 珍,高文静
(91404部队,河北 秦皇岛 066001)
雷达红外多模复合制导对抗试验方法
贺 珍,高文静
(91404部队,河北 秦皇岛 066001)
分析了复合制导的特点,结合复合制导技术特征和对抗试验需求,提出了一种基于单模导引头实现复合制导对抗试验的方案,并分析了时空配准、数据关联和融合检测识别等关键技术的解决方法,为不同频段、不同体制的复合制导对抗和反对抗试验奠定了良好的基础。
复合制导;数据关联;融合识别
0 引 言
随着现代战争攻防对抗日益激烈,战场环境日趋复杂,单一频段(或模式)的导弹导引头因其自身技术性能的局限性和固有的弱点已无法适应战场环境,满足在复杂背景和强干扰下准确截获、跟踪目标的要求,成为限制精确打击武器发挥其有效作战能力的主要因素。为了获得最佳作战效果,运用微波、激光、红外等各种探测器进行多模复合制导已成为导弹制导技术的发展方向。目前,国外现役的导弹武器中就有部分采用了复合制导技术,如美国现役的鱼叉AGM-84E导弹、台湾现役的雄风Ⅱ制导头均采用主动雷达和红外复合制导,美国的RIM-116A导弹和哈姆空地导弹改进型采用的是被动雷达和红外复合制导[1],俄罗斯的日炙SS-N-22反舰导弹采用的是主动雷达和被动雷达复合制导,挪威在研的企鹅4反舰导弹采用的是毫米波雷达、激光和红外复合制导。因此,研究双(多)模复合制导技术的特点,以及针对复合制导技术进行干扰和反干扰是我军在未来战争中处于不败地位的关键。
1 多模复合寻的制导技术
多模复合寻的制导(简称复合制导)是指在导弹武器攻击过程中,采用两种以上的制导方式,分时或同时完成制导过程。采用各种不同模式、不同方式组合的多模复合制导综合了各种单模制导的优点,具有很强的抗干扰能力和目标识别能力。例如雷达和红外复合制导方式,既有雷达的全天侯工作、作用距离远的优势,又有红外制导系统隐蔽性好、目标识别能力强且不容易被电子侦察系统侦察干扰等优点。
1.1 复合制导的优势
1.1.1 增强了导弹的生存能力和突防能力
复合制导提高了导引头使用的灵活性,可预编程设计自动切换多个导引头的工作状态,在导弹受到某种干扰时,总有某个导引头可以提供信息,提高了制导系统的抗干扰能力。
1.1.2 提高了目标检测概率
双(多)模复合制导的选模原则是:工作频率相隔越远越好,工作模式在探测能力和抗干扰功能上要互补,以扩展时间、空间覆盖范围,提高系统的检测、跟踪能力,扩展制导范围。
1.1.3 减少了信息的模糊性
复合制导降低了选择目标的不确定性,提高了对目标的识别能力。
1.1.4 提高了空间分辨力
复合制导可以获得比任何单模制导更高的分辨力,使测得的目标位置数据更准确。
1.1.5 全天候作战能力强
多模复合制导各种模式相互配合使用,提高了对复杂战场环境适应能力;多个工作频段相互补充,提高了全天候作战能力。
1.2 多模复合制导的关键技术[2-3]
1.2.1 头罩技术
多模复合制导导弹的头部需安装双(多)模导引头,这些导引头的探测器都需要外罩保护。这种头罩不但要考虑具有良好的电磁透波性和光学透光性,以满足雷达和红外、电视、激光导引头对观测的要求,还要考虑具有良好的空气动力外型和耐高温性,以减少头罩对导弹飞行的影响,技术实现难度很大。
1.2.2 双模集能器设计技术
双模集能器是一个复合功能器件,既要同时满足两种模式探测目标的要求,其机械强度、刚度和耐高温性能还要同时满足导弹高速飞行、大过载的要求,而且外形和体积还要适应导弹空间的约束,设计和安装难度都很大。
1.2.3 自适应逻辑控制技术
导引头的自适应逻辑控制是根据信号环境及各导引头传感器的工作状态和受干扰情况来自适应选择导引头的工作方式。导引头的自适应逻辑控制主要有两种方式:同控式和转换式。同控式是指参与复合的不同模式导引头同时开机,同时搜索、跟踪目标,各导引头输出的数据送往数据处理系统进行融合处理,给出统一的目标位置数据送给导弹自动驾驶仪,控制导弹朝着目标方向飞行并实施攻击。转换式工作方式是指在复合制导中,同一时间只有一个模式工作,其他导引头处于等待状态,当工作模式受干扰或出现故障时,控制另一模式工作;或者选择在不同的时间(或距离)段由不同的模式工作,达到导引头的最优工作选择,提高导弹的作战效能。
1.2.4 多模信息融合处理
多模复合制导中难度最大的关键技术是多模信息的融合。导引头抗干扰性能好坏的最终体现是对跟踪目标实体的定位、表征和识别。实践证明,多传感器数据融合处理后的目标识别性能比单一模式的最佳目标识别性能要好,但是多模信息融合处理错误将导致导弹攻击失误。
2 多模复合制导电子对抗试验方法
为了研究多模复合制导技术在电子对抗中的性能、特征,探讨对应不同模式的复合制导应采取的干扰措施,检验干扰设备对敌方多模复合制导系统的干扰效果,从而推动对多模复合制导系统的干扰技术研究和装备发展,就必须开展针对复合制导系统的电子对抗试验。
在进行多模复合制导系统的电子对抗试验中,多模复合制导头作为测量设备,用于检验干扰设备对复合制导的对抗效果,因此可以不必受弹上设备体积、重量的限制,也无须共口径,可避免头罩、多模集能器等问题。多种导引头可独立工作,分别模拟各种复合制导的功能,因此可简化对多模复合制导头的研制要求,主要须解决时空配准、数据关联和融合识别跟踪等问题。
2.1 多模复合制导电子对抗试验系统组成
试验系统主体由具有代表性的导引头,如主/被动雷达导引头、毫米波导引头、电视/激光/红外导引头及其辅助控制设备构成,如图1所示。可根据不同模式对抗试验的需要,在复合信息处理系统的控制下,构成不同的复合制导模式(如雷达/红外,雷达/电视,雷达/电视/激光,主动雷达/被动雷达等)的对抗试验系统,选择不同的制导模式来检验干扰设备的干扰效果。
图1 雷达/红外成像复合导引对抗试验系统组成框图
根据控制终端设置的对抗试验流程,各测试导引头获得的数据实时传给复合信息处理系统进行关联和融合处理,并将融合后的航迹信息送到各导引头,用于引导伺服系统进行导弹的运动控制,以修正跟踪航向。
以雷达/红外复合制导为例,其对抗试验的基本工作流程如下:
(1) 雷达导引头首先开机,跟踪目标后,将相关信息送到复合处理系统,由其根据雷达输出的方位角,完成对红外导引头的引导。
(2) 红外成像系统开机,对视场内的目标进行检测识别,并将红外成像处理的相关信息送到复合处理分系统。
(3) 复合处理分系统将雷达数据与红外数据进行复合,根据复合结果输出控制指令和复合方位角分别给雷达和红外导引头。各单模导引头接收复合处理分系统的控制指令,产生相应的动作(重新搜索或转至复合方位角)。
雷达/红外成像复合导引对抗试验系统组成及工作原理如图2所示。
图2 雷达/红外成像复合导引对抗试验系统组成框图
复合处理分系统由视频信号采集处理模块、RS422接口通信模块、定位设备时统卡、主控计算机组成。
视频信号采集处理模块根据雷达和红外成像的状态信息,进行雷达视频回波处理和红外图像处理,得到相应的特征量,识别出干扰和目标,通过PCI总线将特征量的结果输出到主控计算机,主控计算机运行融合算法,得出相应的控制指令和复合方位角。
复合处理分系统接收靶场时统信号(定位设备时统卡),作为两个导引头的时间基准。
基于雷达导引头与红外成像导引头复合制导需解决的主要技术问题包括时空配准、融合检测和融合识别等。
2.2 时空配准处理
因为参与复合处理的末制导设备所使用的坐标系和采样频率不同,所以送至复合信息处理设备的目标信息既不同步又不处于统一的测量坐标系中,如果不进行时空配准,融合后的精度可能会比单一导引模式更差,失去融合意义。因此,在进行融合处理前,需要对参与复合的信息进行时间同步和空间变换处理。
空间配准主要将雷达和红外成像导引头的方位视场中心进行配准,使红外、雷达和转动平台三者的转动中心处于同一铅垂线上,保证在锁定状态下红外成像光轴、雷达电轴与弹轴重合一致,并在每次试验前进行标定。将安装后雷达和红外视场中心不能绝对重合的误差作为系统误差,在后续的处理中消除。
时间配准方法主要有曲线拟合法、最小二乘法和线性插值法等[4],其基本思想都是以某一传感器时间节点为基准,对其余传感器通过已知时间节点上的数据来估计所需时间节点上的数据,从而实现传感器在时间节点上的一致性。线性插值法能够保证插值函数和被插函数在插值节点处相等,不会引入新的误差,计算相对简单,实时性强。线性插值法时间配准原理如图3所示。
图3 线性插值法时间配准原理图
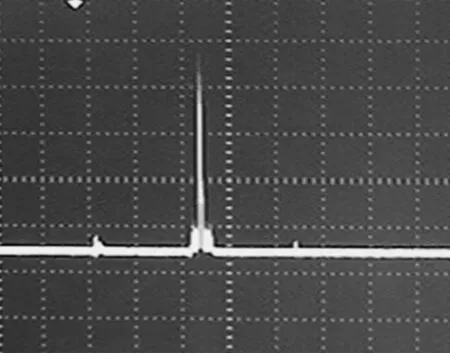
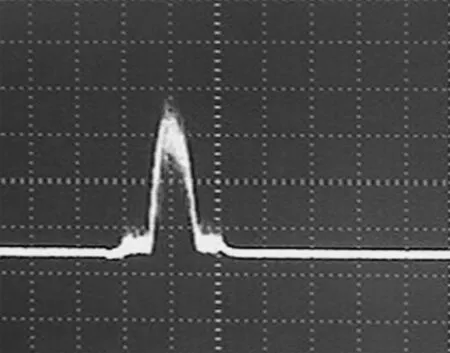
以数据周期大的红外数据为时间基准,假设雷达和红外成像的数据周期分别为T1和T2,T1 (1) 复合处理分系统接收GPS时统信号,为两个导引头提供时间基准。 2.3 数据关联处理 数据关联处理用于确定雷达和红外是否探测的是同一目标。设雷达和红外的测量数据已经进行了时空配准,雷达输出的方位角为ψ1,标准差为δ1;而红外导引头的输出方位角为ψ2,标准差为δ2。若两传感器跟踪的是同一目标,设跟踪误差呈正态分布,则两传感器输出的目标方位角之间的差值小于或等于3(δ1+δ2)+δ的概率约为0.9973,即 |ψ1-ψ2|≤3(δ1+δ2)+δ (2) 其中δ为机械配准误差。由于测量数据存在误差且上述算法采用的只是近似模型,故只通过一次数据比较,不能作最后判定。为此需采用3/3法准则,即连续进行3次数据比较,若3次满足上式,则判定数据未受到干扰,两传感器跟踪的是同一目标,否则认为数据受到了干扰。 如果判断不是同一目标,则融合处理系统发出报警指令,重新进行搜索,直到判断为同一目标为止。 2.4 融合识别与复合跟踪 在对海攻击过程中,主动雷达往往会受到海面回波的干扰。通过对主动雷达和红外成像目标信息的融合识别处理,可以将舰船目标从各种杂波干扰中正确地识别出来。 识别过程一般可分为目标数据获取、特征提取和分类判别3个步骤。目标识别的基础是目标的特征参数,所谓特征就是真目标与假目标之间的一种差异。雷达目标识别是要从目标的雷达回波中提取出反映真假目标之间差异的相关信息标志和稳定特征来判明回波的属性(如图4、5所示),还可以从雷达的视频回波中分辨出目标回波和箔条干扰。目标回波信号幅度起伏慢、平稳;而箔条之间的几何位置无固定关系,回波信号起伏快、闪烁大;雷达接收的箔条回波宽度明显比目标回波宽度宽,再根据红外成像获取的红外图像特征信息,经过加权算法[6],可以获得更加准确的复合目标识别结果。 图4 目标回波 图5 箔条回波 融合识别体现的是传感器的优势互补:红外成像能够体现目标的形状信息,主动雷达能够提供红外成像无法获取的目标距离信息。在融合识别过程中,应充分利用这些信息的互补性。红外成像提供的可供目标识别的信息较雷达丰富,因此在目标识别过程中,应该以红外成像信息为主,雷达提供的信息作为辅助判据。 融合跟踪的功能是通过雷达和红外对目标的测量结果,采用加权的最小二乘融合方法使目标的角位置精度得到进一步的提高。 随着融合技术在制导领域的应用,导弹武备系统的发展将进入一个新阶段。复合制导因其抗干扰能力强,检测、跟踪目标性能更可靠、稳定,越来越受到各国军界的重视,成为未来制导技术发展的方向。因此,建立对复合制导系统的电子对抗检验系统是非常必要的。基于已有的单模导引头设计的复合制导对抗试验系统,可节约大量的硬件制造经费,且功能强、使用灵活、方便,能够模拟不同频段、不同体制的复合制导对抗试验过程,在解决了时空配准、数据关联、融合识别等关键技术问题后,能广泛地应用到复合制导头的电子对抗试验中。 [1] 徐春夷. 复合制导技术的现状与发展[J].制导与引信, 2008(1):17-21. [2] 刘隆和.双模复合寻的制导[J]. 海军航空工程学院学报,1999(3):215-219. [3] 刘隆和.多模复合寻的制导技术[M].北京:国防工业出版社,1998.4. [4] 夏克强,等. 红外/雷达复合制导数据融合技术中的时间较准方法研究[J]. 航天控制, 2007(1):8-12. [5] 孙殿星,等. 雷达/红外复合制导体制下的目标融合检测方法研究[J]. 红外,2010(5):16-22. [6] 艾薇.雷达/红外复合目标识别技术研究[J]. 现代电子技术,2010(17):7-9. [7] 殷艳华,等. 雷达/红外成像复合制导信息融合技术[J].红外与激光工程,2009(3):548-552. A radar/infrared multi-mode compound guidance test method HE Zhen, GAO Wen-jing (Unit 91404 of the PLA, Qinhuangdao 066001, China) With an analysis of the characteristics of the compound guidance, a compound guidance test method based on the single-mode seeker is proposed, combined with the technical features of the compound guidance and the test requirements. Besides, the solutions to the key technical problems such as the time-space registration, the data association, and the fusion detection and identification are analyzed, which lay a good foundation for the ECM and ECCM tests of the compound guidance with different frequency bands and systems. compound guidance; data association; fusion identification 2014-09-12 贺珍(1961-),女,高级工程师,研究方向:雷达与电子对抗。 TN959.21 A 1009-0401(2014)04-0016-04
3 结束语
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
制导与引信(2016年3期)2016-03-20
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11