
Detection technique of moving target based on passive millimeter wave
2014-09-07 08:47:56LIShizhongMUChunyangZHANGYong
LI Shi-zhong, MU Chun-yang, ZHANG Yong
(School of Mechatronics Engineering, North University of China, Taiyuan 030051, China)
Detectiontechniqueofmovingtargetbasedonpassivemillimeterwave
LI Shi-zhong, MU Chun-yang, ZHANG Yong
(SchoolofMechatronicsEngineering,NorthUniversityofChina,Taiyuan030051,China)
Abstract:To solve the problem of insufficient ability when detecting the high-speed moving target with passive millimeter wave technology, a direct-detection passive millimeter wave detecting system using the monolithic microwave integrated circuit (MMIC) millimeter wave radiometer is built, and the measured data are obtained by experiment under different conditions.Based on feature analysis of testing signals, it points out that the peak of the first pulse and interval of two peak pulses are valid features which can reflect the motion characteristic of target.A method to calculate the moving speed of target is put forward.The calculating results indicate that the proposed method has enough accuracy and is feasible to determine the parameters of the moving target using for passive millimeter wave system.
Key words:passive millimeter wave technology; millimeter wave radiometer; detection of moving target; feature analysis; moving speed of target
CLDnumber: TN911.7Documentcode: A
0 Introduction
The millimeter wave (MMW) technology is the extension of microwave to high frequency and development of optical wave to low frequency.Nowadays, it has become a knowledge intensive comprehensive discipline, and is broadly applied to communication, radar, guidance, remote sensing, radio astronomy, clinical medicine, and so on.Especially, in military field, the target detection and recognition technology based on MMW is an important research direction[1].The MMW target detection technology has two working patterns: active MMW and passive MMW.The active MMW is mainly used for detection of long-distance moving target.It can obtain good resolution of distance, azimuth and speed, but the target scintillation effect is easily produced when working at near distance.The passive MMW has some advantages in the near distance detection because of the characteristics of wide working band, good concealment, no target scintillation, etc[2].
At present, the MMW is generally used to detect and recognize the stationary or slow moving targets.For example, a typical application is the terminal sensitive projectile detection system of attacking tank top armor[3-4].But the application of passive MMW in the high-speed moving target detection is also the need for further exploration.Using a monolithic microwave integrated circuit (MMIC) direct-detection MMW radiometer, a method of passive MMW detecting high-speed moving target is researched by feature analysis of testing signals in this paper.The study will provide a technical approach for battle reconnaissance and defense of cruise missiles, helicopters and other low altitude targets.
1 Detecting principle of passive MMW
The MMIC is one kind of functional circuit used for microwave (even millimeter wave) frequency band, which is formed by connecting the passive and active components manufactured on semi-insulating semiconductor substrate by means of a series of semiconductor technological methods.Therefore, MMIC has the characteristics of small size, micro power consumption, low noise, wide band, large dynamic range, strong anti-electromagnetic radiation ability, and so on[5].The working principle of passive MMW detecting system based on MMIC is shown in Fig.1.
The MMW radiometer works in an alternating current system.Its main technical indexes include center frequency 35 GHz, namely 8 mm wavelength; operating bandwidth 7.3 GHz; antenna aperture 150 mm; 3 dB beam width 3.8°; radio frequency gain 30 dB; total gain 60 dB; voltage sensitivity 2 000 V/W; DC consumption 240 mW.Using MMIC direct-detection principle, the MMW radiometer is composed of antenna, low noise amplifier, attenuator, detector and video amplifier.The antenna receives a MMW radiation signal in observed scene.The signal is amplified firstly by the low noise amplifier, and then enters into the detector after moderating attenuation in the attenuator.The detector of high sensitivity will detect out a low frequency voltage signal, which is amplified further by the video amplifier.Finally, an observing signal of the MMW radiometer is output.The output signal of the MMW radiometer is a low frequency signal related to the radiation characteristic of target.It is still weak and accompanied with certain high frequency interferences, so it must further deal with the low frequency amplifier and filter.Thus, an actual passive MMW detection system can be constituted[6-7].
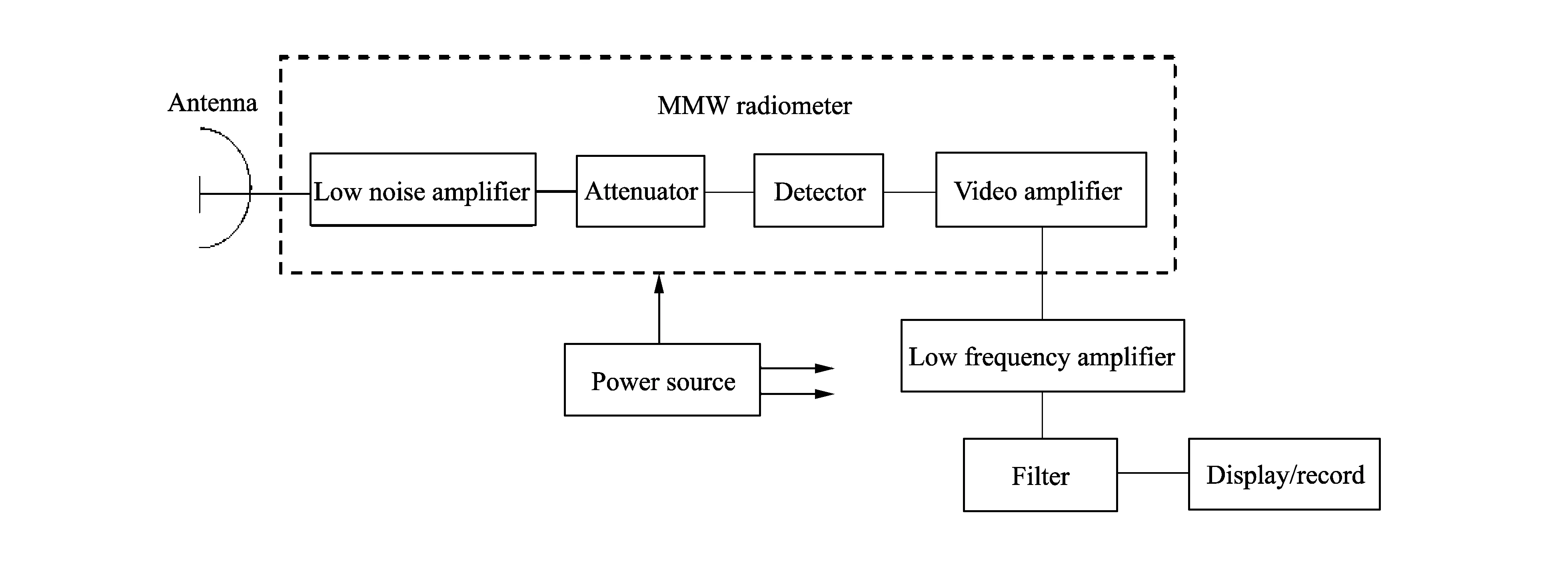
Fig.1 Principle block diagram of passive MMW detecting system
2 Testing experiment and results
The testing experiment of the passive MMW detecting system is chosen to carry out on the highway.The height of the detecting system is 1.3 m, and the detecting direction is vertical to the main lane of highway.The testing site is shown in Fig.2.

Fig.2 Environment of testing site
The tested objects are the high-speed moving vehicles, including car, minivan, truck, heavy truck, oil tank truck, and so on.Their speed is 80 km/h~120 km/h.The detecting ranges are determined according to the running lane, and the typical distances are 3 m, 6 m, 11 m and 14 m.The testing curves under different conditions are shown in Fig.3.
Through comparing the various testing curves in Fig.3, it is observed that the measurement results are not the same in the different targets, different distances and different speeds, but they have certain regularity.
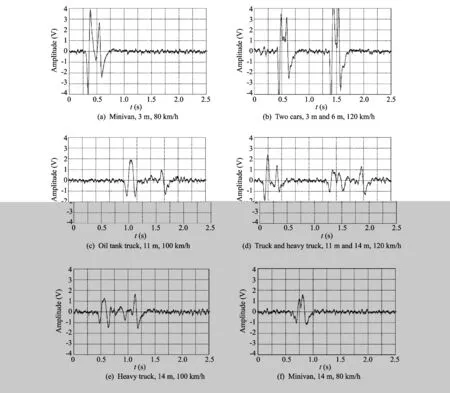
Fig.3 Typical testing curves under different conditions
3 Feature analysis of signals and recognition of motion parameters
The measured signals of the passive MMW detecting system can reflect the characteristic information at three aspects: total changing trend of signal, signal amplitude and pulse response time of signal.
3.1 Total changing trend
As seen from Fig.3, there are two obvious peak pulses on the testing curves when targets pass through the passive MMW detecting system with a certain speed.The peak pulses are decided by the directivity of the detecting antenna.The detecting system adopts a Cassegrain antenna with 150 mm aperture.The detection direction of antenna is right in front of the antenna axis.The beam widthλcorresponding to 3 dB is 3.8°.Thus, the antenna has a very sharp directivity, as shown in Fig.4.
Due to the difference of MMW radiation characteristic between the tested target and surrounding airspace, the detecting system will produce a response when a moving target vertically goes through the detected region of the antenna.The process causes a change of the output signal, and then the two peak pulses are formed front and back.The first peak pulse corresponds to the moment of the target head entering the detecting region, and the second peak pulse represents the moment of the target tail leaving the detecting region.Therefore, the time interval between two pulses is related to the moving speed of target.
For oversize vehicles, the component of the measured waveform is comparatively complex.There are some irregular fluctuations between two pulses because of longer body and inconsistent radiation characteristic on surface.The waveforms of small vehicles are relatively regular ones.

Fig.4 Directivity of detecting antenna
3.2 Signal amplitude
The signal amplitude mainly refers to the magnitude of the pulse peak.Analyzing the measured curves in Fig.3, the peak values of two pulses corresponding to the different detecting distances are shown in Table 1.
Table1Signalamplitudescorrespondingtodifferentdistances

Distance(m)Peak of first pulse(V)Peak of second pulse(V)3≥4.02.8-4.563.53.2111.9-2.31.0-1.4141.0-1.31.3-1.7
As seen in Table 1, the second pulse amplitude has not regularity relative to the detecting distance, but there is obvious proportional relationship between the first pulse amplitude and detecting distance.Specially, the first pulse peak is big at near distance and small at far distance.It can be found from Fig.3 that, the first pulse peak has nothing to do with vehicle type because the tested targets are composed of metal material, and is not directly related to target’s speed.Therefore, the amplitude of the first pulse has stability with the changing trend of detecting distance.Therefore, the signal amplitude can be used as a valid feature of target detection in the passive MMW system.
3.3 Pulse response time of signal
The pulse response time of signal include the duration time of the two pulses and the response time of front edge and rear edge.
In Fig.3(b), the pulse response time of the measured signal corresponding to the different detecting distance has not obvious difference under the similar targets and the same speed conditions.Again comparing Figs.3(a) with (c), the pulse response times of signals also change little under the different target speed and distance conditions.Therefore, the pulse response time of signal is not a valid feature in the passive MMW detecting system.
3.4 Recognition of target motion parameters
As mentioned before, the peak of the first pulse and interval of the two pulses can reflect the motion characteristic when certain target passes through the detecting region.In the practical application of the passive MMW detecting system, the detecting distanceDis determined firstly by means of the amplitude of the first pulse.According to Fig.4, the target’s traveldthrough the detecting region is
The interval of the two pulsestcorresponds to the moving time of target between the head entering the detecting region and the tail leaving the detecting region, and now the total distance of the target moving is (d+L).Here,Lis the target length through!the detecting region.Thus, the moving speed of target is
Calculating the measured signals in Fig.3 according to the above formula, the results are shown in Table 2.Among them, the length of car is 4.0 m, but the detecting system is higher than the height of the car’s head and tail, therefore the tested effective length is less than the actual length.
Because the testing experiment is carried out on the highway with the detecting system close to the ground, the output signal of MMW radiometer is affected by many factors, such as atmospheric interference, ground clutter, inhomogeneity of target radiation characteristics, etc.[8].The analyzing results have some errors, but the expected goal is still reached overall.Therefore, it is feasible to detect the moving target using the passive MMW technology[9].Note that the measured signal in Fig.3(f) is obviously different from other signals.Its calculating result is not listed in Table 2 because the large error.The reason may be that, the tested minivan running in reverse lane is sheltered by the middle isolation zone (also metal material) of highway because of small body and far distance, and then the measured signal is affected largely.

Table 2 Calculating results of target motion parameters
4 Conclusion
Based on the passive MMW technology, a method to detect the moving target is put forward in this paper.Its feasibility is verified by means of the analysis of measured signals.The study provides new thinking for expanding the application field of the passive MMW technology.There are some problems that need to be researched further, such as how to improve the measurement accuracy of pulse amplitude and to determine the target length, the error correction of target through the detecting region under non-vertical condition, the detecting system effectively avoiding clutter interference[10], etc.
[1] LI XING-guo, LI Yue-hua.Foundation of approximate fuze technology on millimeter wave.Beijing: Beijing Institute of Technology Press, 2009.
[2] XIAO Jun.Millimeter wave object detection technology.Master thesis.University of Electronic Science and Technology of China, 2006.
[3] WANG Jian-jun.The application of infrared waves and millimeter wave compounded detecting technology in terminal sensitivity bullet.Microcomputer Information, 2007, 23(29): 275-276.
[4] WANG Xiao-bo.The study of terminal sensitive projectile’s complex detection skill.Master thesis.Shenyang Ligong University, 2012.
[5] GUAN Fu-hong, WANG Chuang, TIAN Wei-zhong, et al.Development of MMIC direct detection receivers.Journal of Infrared and Millimeter Waves, 2007, 26(2): 125-128.
[6] LI Hai-jun.The identification for moving target based on millimeter wave radiometer of direct detection type.Master thesis.North University of China, 2011.
[7] LI Hai-jun, ZHANG Ya, LI Shi-zhong, et al.The target detection device based on passive millimeter wave.Journal of Sichuan Ordnance, 2010, 31(7): 98-100.
[8] ZHANG Yan-mei.Method of identification for close target based on passive MMW detection technique.Transactions of Beijing Institute of Technology, 2006, 26(7): 622-625.
[9] ZHANG Yan-mei, ZHAO Zhi-bei.Techniques of 8mm wave band signal detection and identification for tank.Journal of Infrared and Millimeter Waves, 2009, 28(3): 177-180.
[10] CHEN Xi, XU Jian-zhong, MENG Chun-xiang.A novel approach of waveform jamming for millimeter-wave radiometer of terminal-sensitive projectile.Journal of Astronautics, 2013, 34(6): 854-859.
基于被动毫米波的运动目标探测技术
李世中,牟春阳, 张 勇
(中北大学 机电工程学院, 山西 太原 030051)
摘 要:针对被动毫米波技术探测高速运动目标能力不足的问题, 采用MMIC直接检波式毫米波辐射计, 构建了被动毫米波探测系统, 通过试验获得了不同条件下的实测数据。 在对测试信号的特征进行分析的基础上, 指出第一脉冲的峰值和两峰值脉冲的间距是能够反映目标运动特性的有效特征, 提出了计算目标运动速度的方法。计算结果表明,该方法具有一定的精度, 在被动毫米波系统中确定运动目标参数是可行的。
关键词:被动毫米波技术; 毫米波辐射计; 运动目标探测; 测试信号特征分析; 目标运动速度
引用格式:LI Shi-zhong, MU Chun-yang, ZHANG Yong.Detection technique of moving target based on passive millimeter wave.Journal of Measurement Science and Instrumentation, 2014, 5(4): 29-33.[doi: 10.3969/j.issn.1674-8042.2014.04.006]
Article ID:1674-8042(2014)04-0029-05
10.3969/j.issn.1674-8042.2014.04.006
Receiveddate: 2014-07-25
Corresponding author:LI Shi-zhong (lishizhong@nuc.edu.cn)
 Journal of Measurement Science and Instrumentation2014年4期
Journal of Measurement Science and Instrumentation2014年4期
- Journal of Measurement Science and Instrumentation的其它文章
- Nonlinear principal resonance of magneto-electro-elastic thin plate
- Effect of TPB on curing reaction of HTPB-TDI
- Measurement and control system for servo pressure pulse testing equipment
- Polarization state measurement based on photoelastic modulation
- Mosaic line-scan camera based on FPGA
- Empirical model of correction for zenith tropospheric delay