
配重式曳引装置在堆垛机起升机构中的应用
2014-09-06 00:56王冬良
机械设计与制造工程 2014年10期
王冬良
(三江学院 机械工程学院,江苏 南京 210012)
配重式曳引装置在堆垛机起升机构中的应用
王冬良
(三江学院 机械工程学院,江苏 南京 210012)
主要介绍了堆垛机提升机构的种类、特点,结合曳引轮提升机构的优点,提出了选用钢丝绳曳引提升机构的方法。通过对钢丝绳曳引装置的分析计算,依据提升机构的设计参数,对减速电机、钢丝绳、钢丝绳缠绕方法、曳引轮及滑轮等进行了分析计算并得出了该提升机构的一系列数值,为堆垛机提升机构部件选型和研制提供了依据。通过曳引条件的核算,验证了设计机构的合理性及可靠性。
堆垛机;提升机构;曳引装置
巷道堆垛机的主要用途是在高层货架的巷道内来回穿梭运行,将位于巷道口的货物存入货格,或者取出货格内的货物运送到巷道口[1]。其主要由载货台、行走机构、起升机构、货叉伸缩机构、电气控制系统及安全装置等机构组成。其中,起升机构主要是实现堆垛机载货台的升降运动,是堆垛机最基础也是最主要的机构。目前,国内堆垛机起升机构有链条提升、钢丝绳卷筒提升以及钢丝绳曳引轮提升3种[2],其中链式和钢丝绳卷筒式的起升机构较多。但根据研究分析,钢丝绳曳引式起升机构具有传动体积小,传动电机体积小、功率小,提升高度不受限制等优点,因此本文提出堆垛机选用配重式曳引轮的提升方式。
1 堆垛机起升机构工作原理
如图1所示,堆垛机起升机构是由减速电机、曳引轮、制动器、滑动组、钢丝绳、导向轮和反绳轮、柔性件等组成,本文所述起升机构主要用于载货台的升降。
当需要存取高位托盘货物时,起升减速电机驱动曳引轮上的钢丝绳,载货台上升,同时配重装置下降;反之,则载货台下降,配重装置上升。常闭式制动器在通电时松闸,使机构运转,实现载货台升降动作;在失电情况下,制动器能使载货台连同货物停止升降,并在指定位置上保持静止状态[3]。
当载货台升到最高极限位置时,触碰极限位置限制器使载货台停止上升。当载货台所载货物接近额定载荷时,起重量限制器发出警示信号并通过显示装置显示超载信息,一旦超过额定载荷立即切断电源,使起升机构停止运行,以保证安全。

1—上横梁;2—配重装置;3—立柱;4—钢丝绳;5—减速电机;6—曳引轮;7—载货台;8—下横梁
2 配重式曳引装置结构及工作原理
2.1曳引装置结构
为降低堆垛机载货台起升重物时的功耗,缩小驱动装置体积,在起升机构中常采用配重式的曳引装置,如图2所示。曳引式起升机构在升降电梯行业中已经得到了广泛的应用,其主要由曳引轮、钢丝绳、导向轮和减速电机等部件组成。导向轮(滑轮组)、钢丝绳的固定装置安装在上横梁上,如图3所示。
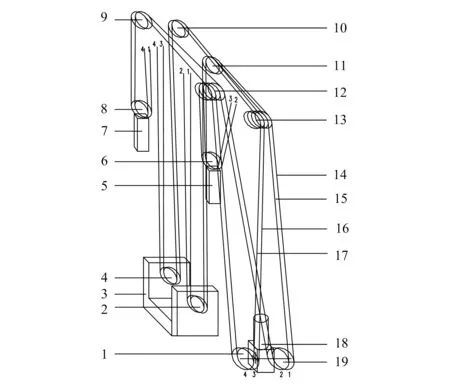
1,19—曳引轮;2,4—载货台动滑轮;3—载货台;5,7—配重装置;6,8—配重装置动滑轮;9,10,11,12,13—定滑轮;14—钢丝绳1;15—钢丝绳2;16—钢丝绳3;17—钢丝绳4;18—减速电机
2.2曳引装置工作原理
如图2所示,减速电机18驱动曳引轮1,19旋转,依靠钢丝绳14,15,16,17与曳引轮绳槽之间的摩擦力(称为曳引力或驱动力),使曳引轮通过钢丝绳、定滑轮组9,10,11,12及动滑轮组2,4,6,8提升载货台3及重物。为使载货台3与配重装置5,7各自沿导轨运行而不相蹭,上横梁上均放置导向轮使二者分开。
载货台及荷载的重力之和需与提升机构配重装置5,7的重力对等,依靠曳引力,减速电机仅需较小驱动力即可使额定载重内的货物升降,实现堆垛机的装卸功能。当电机顺时针转动时,曳引轮也顺时针(面对曳引轮方向)转动,驱动钢丝绳,拖动载货台上升,而配重装置作相对运动即下降。反之则载货台下降,配重装置上升。于是,载货台在堆垛机中沿导轨上、下往复运行,执行垂直运送任务,运行中载货台的货物质量、位置以及提升机构运行方向都在变化,使起升装置在各种情况下都有足够的曳引力。

1,3,4—单轮定滑轮;2,5—钢丝绳端接装置;6,7—双轮定滑轮
3 配重式曳引装置设计
某立体仓库为10巷道20排32列10层。堆垛机起升机构的参数设计为:堆垛机总长×总宽×总高=4.14m×1.22m×18.17m,载货台质量为482kg,堆垛机额定载荷1 000kg,行走最大速度125m/min,升降速度0~35m/min,伸缩货叉质量为348kg,货叉空载速度40m/min,货叉满载速度30m/min,托盘(含货物)长×宽×高=1m×1.2m×1.45m,载货宽度1.2m,巷道净宽1.45m,货叉叉取货物方向为沿堆垛机宽度方向。
3.1平衡系数及配重的选择
配重是曳引绳与曳引轮绳槽产生摩擦力的必要条件,它与载货台质量及有效载荷的质量保持平衡,在起升机构运行时,能够降低传动装置功率消耗。
同时,配重匹配又直接影响到曳引力和传动功率。当载货台的质量与配重质量相等时,若不考虑钢丝绳质量的变化,曳引装置只需克服各种摩擦阻力就能轻松地运行。但是实际情况却是载货台的质量随着货物的变化而变化,固定的配重不可能在各种载荷下都完全平衡载货台上的质量。为使起升机构在满载和空载情况下,其负载转矩的绝对值基本保持不变,国标规定平衡系数[4]K=0.4~0.5,即配重为额定载荷的40%~50%。
本文根据堆垛机使用环境,选择K=0.4,在0.4倍额定载荷时,其负载转矩为零,载货台与配重完全平衡,起升机构处于最佳工作状态。
根据设计参数,堆垛机额定载荷1 000kg,伸缩货叉质量348kg,载货台质量482kg,经计算后选择配重总计为732kg,两边配重各为366kg,并将配重布置在两个立柱内。
3.2电机的选择
电动机所需输出功率为:
(1)
式中:Pn为工作装置所需要的输入功率,kW;F为牵引力,kN;v为曳引绳线速度,m/s;η为传动系统机械效率,一般取0.8。
若不计曳引绳质量,根据式(1)得
Pn=(366×9.8÷1 000)×35÷60÷80=2.62(kW)
综合考虑堆垛机结构,选择电机型号为SK9042.1LX-100L/40 Bre40,电动机额定功率为3kW,输出转速n2为35r/min,减速比i为40.54。
3.3钢丝绳的选择
曳引钢丝绳,又称曳引绳,承载着载货台、配重、额定载重货物的质量等,依靠摩擦力通过曳引轮、导向轮(定滑轮)、动滑轮提升载货台,钢丝绳两端通过绳夹固结在端接装置上,钢丝绳的结构为圆形股状结构。
钢丝绳直径根据经验公式(2)计算:
(2)
式中:P最大为单根钢丝绳的最大拉力;P破为钢丝绳最小破断拉力;S为钢丝绳安全系数。
根据额定载荷、货叉质量、载货台质量求得总质量为1 830kg,总质量由4根钢丝绳分担,得到:
(3)
式中:G为载荷总质量,kN;η为滑轮组工作效率,取η=0.93。则
P最大=1 830×9.8×0.93/4=4.17(kN)
查《机械工程手册》(机械工业出版社,第2版)可知,钢丝绳安全系数不小于5,本文取8,得
P破≥P最大·S=4.17×8=33.36(kN)。
根据求得的钢丝绳的最小破断拉力,查《机械工程手册》得钢丝绳型号:电梯钢丝绳 8×19S+NF-10-1500(双) 右,GB8903-88。
3.4钢丝绳缠绕方式
4根钢丝绳的缠绕方法相同。图2 所示,钢丝绳一端固结在钢丝绳端接装置(图3中2所示)上,另一端经配重装置动滑轮8后,向上绕经定滑轮9,再经过双定滑轮12内侧的滑轮后向下至曳引轮19,绕过该曳引轮后向上至定滑轮13内侧滑轮后到定滑轮4,绕过定滑轮4后向下延伸至载货台右侧动滑轮2,绕过动滑轮2后向上,最终到上横梁的端接装置固结(图3中5所示)。
3.5曳引轮和滑轮的选取
曳引轮是装在减速电机侧的绳轮,是起升机构曳引动力装置,利用曳引钢丝绳与曳引轮缘上绳槽的摩擦力传递动力。查《机械工程手册》后,曳引轮的材料选用QT60-2球墨铸铁。
结合国家标准GB7588-2003《电梯制造与安装安全规范》中的要求:曳引轮直径要大于钢丝绳直径40倍,一般取45~55倍。因此,本文取直径为450mm的标准曳引轮,绳槽为半圆型。
结合经验公式(2)计算滑轮直径:

(4)
式中:D为滑轮的名义直径,即槽底直径;d为钢丝绳直径;e为轮绳直径比,由钢丝绳用途和工作类型决定。
本文选择的钢丝绳直径为φ10mm,查《机械工程手册》得e=25,因而D≥250mm。取轮槽底测量直径为280mm的标准滑轮。
4 曳引条件校核
目前,关于堆垛机安全规范的国家标准尚未发布,本文根据国家标准GB7588-2003《电梯制造与安装安全规范》的规定以及机械设备经验参数进行曳引力计算。
曳引条件必须满足:
求得:
efα=e0.197×3.141 5=1.86
5 结束语
本文根据堆垛机设计参数设计的配重式曳引装置能够满足起升机构在实际工作场合的使用需求,同时起升机构驱动电机的功率较同样设计参数下其他类型起升机构的电机功率有了明显降低,体积也相应地减小。本文对配重式曳引装置的钢丝绳缠绕工艺做了详细介绍,通过曳引条件校核了曳引装置的可靠性,能为其他物流机械设计提供一定的参考,但对钢丝绳与曳引轮之间的摩擦特性有待进一步深入研究。
[1] 胡开元,刘克武.巷道式堆垛机提升机构的设计与分析[J].大众科技,2012 (8):142-146 .
[2] 王栋生,郝隆誉,马笑.堆探机弹性能曳引装置及其特点[J].物流技术与应用,2004 (10):85.
[3] 卢宗慧,徐星蕾,卢泓翰,等.堆垛机提升机构设计[J].制造业自动化,2011 (5):129-130 .
Theapplicationofbalancingtractiondeviceinliftingmechanismofthestacker
WANG Dongliang
(Sanjiang Institute, Jiangsu Nanjing, 210012, China)
It introduces the types, characteristics of the stacker lifting mechanism. Combining the advantages of traction lifting mechanism, it presents the steel rope traction lifting gear, calculates the steel rope device. Based on the parameters of lifting mechanism, it analyzes the motor, steel rope and winding method, tractive sheave and pulleys, determines the design paremeters. This provides the base of stacker design and parts selection, ensures that the design is reasonable.
stacker; lifting mechanism; traction devece
10.3969/j.issn.2095-509X.2014.10.019
2014-09-18
王冬良(1980—),男,江苏常州人,三江学院讲师,主要研究方向为物流机械自动化、汽车电子控制技术。
TH122
A
2095-509X(2014)10-0081-04
猜你喜欢
机电工程技术(2022年10期)2022-11-27
初中生学习指导·提升版(2020年5期)2020-09-10
设备管理与维修(2020年9期)2020-06-01
中国特种设备安全(2019年11期)2020-01-16
中国特种设备安全(2019年7期)2019-09-10
中国特种设备安全(2018年4期)2018-05-15
中国特种设备安全(2018年12期)2018-03-15
质量技术监督研究(2017年4期)2017-05-07
中学物理·高中(2017年4期)2017-04-27
工业设计(2016年5期)2016-05-04
