
Anti-Collision of Tower Crane via Ultrasonic Elman Fusion*
2014-09-06 12:26LIXipingGULichen
传感技术学报 2014年1期
LIXiping,GU Lichen
(School of Mechanical and Electrical Engineering,Xi’an University of Architecture and Technology,Xi’an 710055,China)
Anti-Collision of Tower Crane via Ultrasonic Elman Fusion*
LIXiping*,GU Lichen
(School of Mechanical and Electrical Engineering,Xi’an University of Architecture and Technology,Xi’an 710055,China)
Aiming at intelligent active anti-collision,to better improve the passive security model of tower crane which lacks flexibility and simultaneity,analyzing themappingmode between obstacle’s outline and ultrasonic distancemeasurement time series,combining with the Elman network in time fusion,a practical mode was created which applies singular ultrasonic sensor to rapidly identify the precise position data by distance sequence through deformed input and output,which has been experimentally verified that it can satisfy the tower crane working requirements with low cost,high speed and high precision,and it simultaneously provides a better option for low precision sensor to acquire highly precise output.
Elman network;tower crane;anti-collision;time fusion;ultrasonic sensor
建筑行业中,随着塔机的广泛应用,塔机碰撞事故日益增多,造成了严重的人员伤亡和经济损失。针对塔机防碰撞的研究已从技术成熟的平面被动防碰撞向智能化主动防碰撞方向迅速发展,如法国POTAIN公司通过限制区域的预先规划,可以同时解决9台塔机之间的相互防碰撞问题;新加坡ebuild公司以网络拓扑的形式将每台塔机上的中央处理器连接起来,通过实时监测塔机水平臂对地运动后计算塔机间的相对位置来实现防碰撞功能等,但国外产品技术复杂,价格昂贵,国内施工单位使用较少,且仍以被动区域限制为主,缺乏主动性、灵活性、时实性和可移植性,其他采用先进传感器、通信技术、智能算法的防碰撞技术正处于研究阶段[1~10],远距离超声传感器用于塔机防碰撞还处于研究起步阶段,单超声传感器时间融合技术也没有相关文献报道。
1 时间融合
在国家自然科学基金资助下,本文基于超声传感器解决塔机防碰撞问题,由于超声传感器只能测距无法定向,因此不能直接对障碍物目标识别定位,只能通过测距值集合融合获得障碍物坐标,以实现主动防止碰撞的目的。设m个超声传感器在n个时刻分别观测障碍目标o,观测值集合表示为{ljk},ljk表示第j个传感器在k时刻的观测值,j=1,2…,m;k=1,2…,n,目标o的融合估计值可表示为{oi},oi表示为第i组观测数据的融合结果,i=1,2…,u。则在融合实现方式上,即可以对同一时刻的不同位置超声传感器观测值进行空间融合,即oi=f (lj),也可以按时间先后对目标在时间序列内的观测值进行时间融合,即oi=f(lk)。如果在塔机防碰撞中采用常规多超声传感器空间融合技术,必须通过数据关联和几何运算的方法求解障碍物坐标,由于超声传感器本身精度、系统误差、测量误差的存在,以及安装精度要求高,计算过程繁琐复杂,数据冗余较大等问题,使得数据关联与计算求解有很大难度,无法满足塔机防碰撞的实时、快速、高精度要求,因此,本文探索通过时间融合方法求解障碍物坐标。
2 Elman网络
实现时间融合方法,首先要确定单超声传感器连续测距序列的波动规律与障碍物的形状位置是否存在着明显的对应关系。设计仿真方案如图1(a)所示:塔机吊臂顶端有远距离(有效探测距离20 m)超声传感器,可检测区域依次出现点状、球状、平面障碍物等,吊臂回转速度为0.6 r/min,在回转过程中,根据传感器扫描目标后返回的测距序列,可绘制障碍物与超声测距序列的对应关系图如图1(b)~图1(d)所示。由图中所示仿真结果可知,障碍物的形状位置确与测距序列波动规律有对应关系并可描述为O(θ,l)=f[L'(t)],其中:L'=[l'(t),l'(t-1),…,l'(t-n+1)]为T=[t,t-1,…,t-n+1]的n个依次离散采集时间上,传感器采集到的n个测距值,O=[o(t),o(t-1),o(t-2),…,o(t-n+ 1)]为T内障碍物轮廓上被超声传感器扫描到的点的极坐标(θ,l)集合。由于此映射是非线性复杂映射,且不存在能量转换,很难直接通过物理定律求解其传递函数;超声传感器连续时间的测距值时间短,差异小,数据多,测距序列与障碍物特征的映射关系复杂、非线性、难以用传递函数表示;工程实际中干扰多、误差大,求解传递函数还存在简化计算,求解所得的精度很难满足实际工程的需要,鉴于这些原因,用传统求解传递函数的方法通过测距序列数值计算得出障碍物位置信息有很大困难。在非线性研究中被广泛采用的神经网络具有很强的逼近非线性函数的能力,能够很好的拟合这种复杂映射关系;神经网络还具有并行运算,分布式信息存储,鲁棒容错性好以及具备自适应学习能力等一系列优点,已在智能控制、信息处理等多领域成功应用;神经网络中的Elman网络存在的局部回归联系单元可以很好地利用塔机防碰撞问题中连续两组输入之间的相互关联性,因此,本文探索采用Elman神经网络拟合测距时间序列与障碍物形状位置间的映射关系O(θ,l) =fe[L'(t)]。Elman网络是一种局部回归网络,其结构如图2所示,由输入层、中间层(隐含层)、承接层和输出层构成。其输入层、隐含层和输出层的链接类似于前馈网络,承接层又称为上下文层或状态层,用来记忆隐含层单元前一时刻的输出值并返回给输入,这种反馈自联方式使其对历史状态的数据具有敏感性,增加了网络本身处理动态信息的能力,即可以学习时域模式,也可以学习空域模式,达到了动态建模的目的[11~13]。为了尽量减小神经细胞的个数以提高网络的速度和泛化能力,通过不同神经元计算误差的比较最终确定神经元个数,并经初始化权值和阀值后可建立网络[14]。为保证网络计算的实时快速性,耗时较多的网络训练以仿真数据离线进行。图1(b)~图1(d)中深黑线指障碍物轮廓,分别为点状、弧面、平面;黑线为障碍物轮廓中被探测且返回测距值的点;浅黑线为假定障碍点总位于扇形测区中线所绘测距时间序列。下面的图3中扇形区域为超声检测区,O指障碍物。
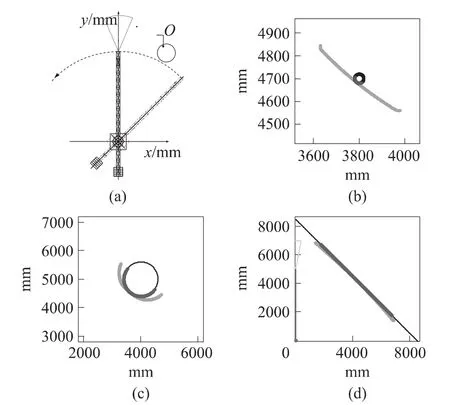
图1 不同障碍物与超声测距序列的对应关系图

图2 Elman网络结构示意图

图3 α角示意图
3 输入输出
在Elman网络识别过程中发现,以测距值L'为输入,经网络对障碍物O的坐标进行识别,计算结果精度不高、速度不快,主要原因是测距值本身精度不高,计算量大,导致识别效果不佳。为改善系统抗干扰能力,提高网络处理速度,需要尽可能减少输入输出元的数量、提高输入输出数据质量。在输入上,考虑变化率的求解是对一组多个测距值的拟合,既降低测距误差的干扰也不改变映射关系,尝试以测距序列的变化率k代替测距序列L'做为网络的输入;在输出上,考虑在已知测距值的情况下,求出角度就可明确障碍点的位置,尝试将输出变形为障碍点与超声检测区域中线的夹角α,如图3所示。通过此种变形,O(θ,l)=fe[L'(t)]可简化为α=fe(k)。
输入输出的调整是否合适,要验证两者间是否仍存在着明显的对应关系,由图4所示验证结果可知,α=fe(k)的输出输入虽存在对应关系,但在有些情况下并非是一一对应,例如图4(d)所示超声传感器在左侧中点位置安装时,同一变化率会对应两个夹角值。为保证系统的映射关系,尝试引入测距序列时间函数的二次导数(k的变化率k'),即将α=fe(k)变形为α=fe(k,k')后,此问题得到解决。图4每组左边一幅为传感器在吊臂上的安装情况,右边一幅为对之对应的k与α关系图。
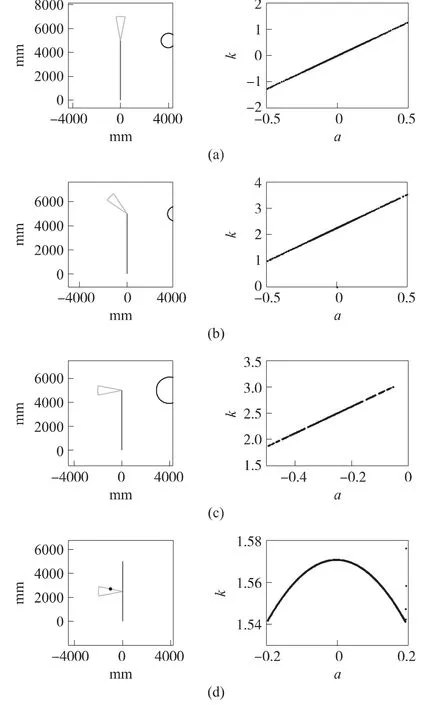
图4 传感器不同安装位置时的k与α的对应关系图
4 网络识别
已知在T内n个离散时刻,远距离超声传感器的n个测距值序列拟合出的曲线为L″=f(t),L″在T点的一阶和二阶导数分别为K=[k(t),k(t-1),…,k(t-n+1)]、K'=[k'(t),k'(t-1),…,k'(t-n +1)],设Α=[α(t),α(t-1),…,α(t-n+1)]为T内各时刻障碍点至传感器连线和超声波探测扇形区域中线的夹角值序列。以K、K'为输入,A为输出,代入网络识别方程式(1)与式(2),求解出α,就可以较高精度识别障碍物轮廓O(α,l),识别过程如图5所示


图5 网络识别过程示意图
式(1)、式(2)构成Elman单超声传感器障碍物识别方程组,经由单超声传感器测距时间序列求出夹角Α,并最终以较高精度识别出障碍物轮廓O={oi}后,再将该障碍物轮廓信息与塔机运行信息联合进行安全判断有无障碍、是否减速、是否停机,并通过预警信息及时提醒人工干预做好避障工作,就可实现塔机运行过程中防止碰撞发生的目的。安全预警部分本文不再赘述。
5 试验验证
Elman网络时间融合障碍物识别效果可以通过仿真进行验证,试验方案如图1(a)所示:塔机(以QTZ63型参数设计)吊臂顶端安装有西安建筑科技大学机械电子技术研究所研制的20 m远距离超声传感器,在塔机吊臂转动平面上距离塔身约60 m~65 m区域内存在障碍物O,分别设置为点状、球状、曲面、平面、棱面等,吊臂回转速度为0.6 r/min,在回转过程中,传感器依次扫过上述目标,并返回测距序列,测距值测量误差最大设置为291mm。经式(1)、式(2)运算,由障碍物轮实际廓线和网络输出轮廓点绘制可得图6所示。图6中细线为障碍物实际轮廓,黑点为网络识别障碍物轮廓结果。
由图6可知,传感器返回的测距序列可以有效估计出障碍物轮廓曲线,其网络输出值与真实值间的最大绝对误差为350 mm,相对有效报警距离(20 m)的相对误差为0.017 5,较以BP神经网络方式实现[15],误差缩小了56%,例见如图7所示球状障碍物时的比较;由于网络训练采用了离线处理,在线计算速度仅为0.017 s,远高于一般多源融合数据关联及方程组求解速度,且远远小于塔机吊臂工作转速,完全可以满足工程实际。图7(a)为BP网络输出,图7(b)为Elman网络输出。

图6 Elman网络输出结果

图7 BP与Elman网络不同输出结果
6 结论
本文针对塔机安全预警的需要,为实现单超声传感器测距信号识别障碍物位置,创新的引入了Elman网络和时间融合技术,并经试验验证可以满足工程中的低成本、高精度、快速度的实时应用需要,并为低精度传感器获取高精度识别结果提出了可供借鉴的一种思路。
[1]Ghang Lee,Hong-Hyun Kim,Chi-Joo Lee,et al.A Laser-Technology-Based Lifting-Path Tracking System for a Robotic Tower Crane[J].Automation in Construction,2009,18:865-874.
[2]Kyeong Hoon Park,Han Na Lee,Hyung Seok Kim,et al.AR-HUD System for Tower Crane on Construction Field[J].IEEE International Symposium on Virtual Reality Innovation,Singapore,2011,19-20:261-266.
[3]Ali MS,Ajmal Deen N,Ramesh Babu,et al.Collision Free Path Planning of Cooperative Crane Manipulators Using Genetic Algorithm[J].Journal of Computing in Civil Engineering,2005,19 (2):182-193.
[4]Collision Avoidance for Cranes[J].Concrete Products,2008,111 (6):PC14-PC14.
[5]Shih-Chung Kang,Eduardo Miranda.Computational Methods for Coordinating Multiple Construction Cranes[J].Journal of Computing in Civil Engineering,2008,22(4):252-263.
[6]Mohamed Al-Hussein,Muhammad Athar Niaz,Haitao Yu.Integrating 3D Visualization and Simulation for Tower Crane Operations on Construction Sites[J].Automation in Construction,2006,15: 554-562.
[7]闫佳妮,邓宗白.塔群防碰撞监测系统的研究[J].建筑机械,2011(7):106-111.
[8]Aviad Shapira,Yehiel Rosenfeld,Israel Mizrahi.Vision System for Tower Cranes[J].Journal of Construction Engineering and Management,2008,134(5):320-332.
[9]李守林,吴学松.中国塔式起重机50年回顾与展望[J].建筑机械化,2007(9):9-13.
[10]杨清泉,刘春林.塔机防碰撞及工作区域限制技术[J].建筑机械,2004(7):78-85.
[11]韩旭明.Elman神经网络的应用研究[D].天津,天津大学,2006.
[12]彭波.基于Elman神经网络和聚类算法的颜色识别研究[D].湖南:长沙理工大学,2010.
[13]付华,杜晓坤,陈峰.基于神经元网络的超声传感器补偿算法及在井下机器人避障中的应用[J].传感技术学报,2006,(2): 511-514.
[14]闻新,周露,王丹力,等.MATLAB神经网络应用设计[M].北京:科学出版社,2000.
[15]Li Xiping,Gu Lichen,Jia Jia.Anti-Collision Method of Tower Crane via Ultrasonic Multi-Sensor Fusion[J].IETConference Publications,2012,2012(598)522-525.

李西平(1978-),男,西安建筑科技大学职工,中级职称、在读博士,目前研究方向为多源信息融合与智能控制,lixiping@foxmail.com;

谷立臣(1956-),男,西安建筑科技大学教授、博导、机械电子技术研究所所长,中国振动工程学会动态测试专业委员会常务理事,故障诊断专业委员会理事,全国高校测试技术学会西北分会副理事长;研究方向为机电液系统设计理论与方法、设备多源诊断信息获取与融合理论等,gulichen@126.com。
基于Elman超声信号时间融合的塔机防碰撞技术*
李西平*,谷立臣
(西安建筑科技大学机电工程学院,西安710055)
针对塔机防碰撞以缺乏灵活性和时实性的被动防御为主的现状,为实现智能化主动防碰撞的目的,通过分析障碍物轮廓与超声测距时间序列间的映射关系,以时间融合的思想引入Elman网络,并通过变形输入输出实现了单超声传感器由测距序列快速识别障碍物高精度位置信息的功能,并经试验验证可以达到预期低成本、快速度、高精度的塔机工作使用要求,也为低精度传感器获取高精度融合结果提出借鉴思路。
Elman神经网络;塔机;防碰撞;时间融合;超声传感器
TP183
A
1004-1699(2014)01-0096-04
2013-10-17修改日期:2014-01-01
C:7820
10.3969/j.issn.1004-1699.2014.01.018
项目来源:国家自然科学基金项目(50975218);陕西省教育厅自然专项基金项目(09JK520)
猜你喜欢
装备制造技术(2020年1期)2020-12-25
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
制造技术与机床(2019年11期)2019-12-04
中国交通信息化(2017年4期)2017-06-06
电子制作(2017年7期)2017-06-05
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
城市道桥与防洪(2014年5期)2014-02-27
- 传感技术学报的其它文章
- Ion-Selective Detection of Cations and Anions by Using Pulsed Amperometric Two-Electrode System*
- Design of MEMSBionic Vector Hydrophone Based on NBR Encapsulation*
- Analysis of the Harmonic Frequency to Piezoelectric Ceramic Embedded in Concrete*
- Wireless Instrumentation Design for Heavy Metals Detection in Water Based on Light Addressable Potentiometric Sensor*
- Gas Leakage Source Localization Algorithm Based on Distributed MMSE Sequential Estimation*
- Wireless Sensor Node Based on Infrared Communication in Leaky Cable Detection*