基于ARM11的机动车柔性限行管理系统设计*
2014-09-06 10:50张凯,孙跃,周侃,江慧
电子器件 2014年5期
关键词:嵌入式
张 凯,孙 跃,周 侃,江 慧
(南京信息工程大学信息与控制学院,南京 210044)
基于ARM11的机动车柔性限行管理系统设计*
张凯*,孙跃,周侃,江慧
(南京信息工程大学信息与控制学院,南京 210044)
摘要:为解决城市道路交通拥挤问题,设计了一套基于ARM11的机动车柔性限行管理系统。系统采用S3C6410微处理器为核心,利用GPRS无线通信技术将GPS定位信息传输到交管信息处理中心服务器。交管中心分路段设定限行比例,统计机动车该月在限行路段中出行天数,并将机动车出行信息反馈给车主,对超出限行比例的机动车收取拥挤费,从而实现机动车柔性限行管理。实验证明:GPRS发送GPS定位信息准确,车辆出行信息反馈及时,系统设计达到了预期的功能和要求。
关键词:嵌入式;柔性限行;S3C6410;GPS;GPRS;
随着城市交通拥挤的日益严重,机动车限行问题已成为近年来城市交通问题研究的热点。目前主要采取机动车尾号限行、错峰限行等限行措施,限行措施在很大程度上改善了城市交通拥堵状况,但在实际操作中却存在着较多的问题,一是限行号码、时间和路段过于混乱,不利于记忆掌握。二是限制了一些真正需要出行的车辆,对部分市民日常生活秩序造成很大的影响[1]。针对上述问题,本文提出一种根据机动车出行比例进行限行的柔性管理系统,即按设定好的限行比例,算出该月该路段最多可行驶天数,对超出限行比例的机动车征收拥堵费。随着嵌入式、GPS以及GPRS技术的发展,为该系统的实现提供了有效的解决方法,即在车辆出行时车载终端将机动车GPS定位信息发送至交管信息处理中心服务器,交管中心统计机动车当月在限行路段上的出行天数,并将机动车出行信息发送至车载终端,车主根据终端显示的出行信息柔性设定出行计划,这样使得机动车限行措施更加人性化。
1 系统总体设计
本设计结合GPRS数据传输技术、GPS定位技术以及GSM无线通信技术,搭建了基于ARM11平台的机动车柔性限行管理系统。该系统主要由2个部分组成,其结构如图1所示:第1部分为车载嵌入式设备,主要由S3C6410微处理器以及其外围电路(RS-232接口、USB接口、LCD显示屏、A/D转换等)、GPS模块和GSM/GPRS收发模块组成。第2部分为信息处理中心,该中心主要由服务器和GPRS模块组成。
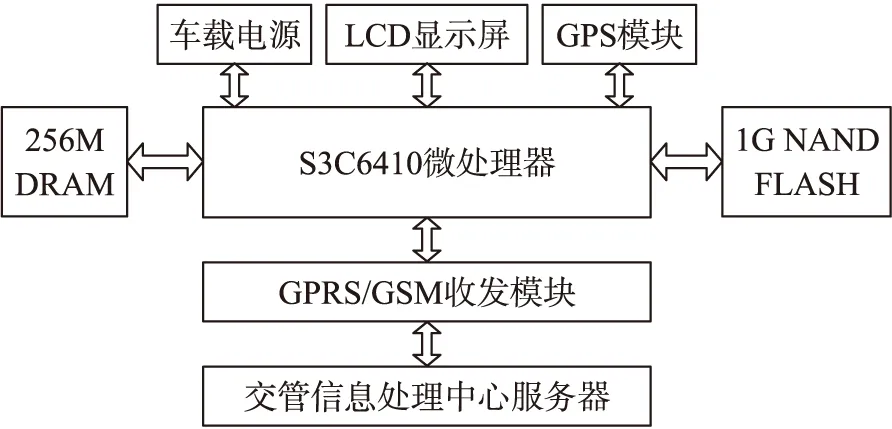
图1 系统总体结构图
系统主要功能如下:
(1)车载终端由车载电源供电,当机动车启动时,车载终端自动启动。在机动车行驶过程中,车载终端经GPRS以数据传输方式不断向信息处理中心发送车辆位置信息。
(2)交管信息处理中心根据接受的车载终端发送过来的机动车GPS信息判定机动车是否在限行路段中,若在则统计为当日出行,并将车主已出行信息发送至车载终端。
(3)交管信息处理中心统计机动车出行天数,判断当月该机动车出行是否在限行比例之内,并对出行天数超出限行比例的机动车收取拥挤费。
2 系统硬件设计
2.1S3C6410微处理器模块
本系统采用的是三星公司推出的S3C6410微处理器[2],是基于ARM11架构的16/32RISC微处理芯片,其采用ARM1176JZF-S的核,包含了16 kbyte的指令数据TCM以及16 kbyte的指令数据Cache,可以在667 MHz的主频上稳定工作,其DDR数据传输速率可以达到266 Mbit/s。模块采用64 bit/32 bit内部总线构架,通过AXI,AHB和APB总线组成。并且支持多种外部接口,是一个低成本,低功耗,高性能的应用处理器。
2.2RS232接口模块
系统的嵌入式终端与GSM/GPRS模块、GPS定位模块之间采用RS-232串行通信接口连接[3]。所以系统采用MAX232芯片来实现TTL与RS-232的电平转换。MAX232工作电路如图2所示。
当嵌入式终端需要与外部设备进行通信时,就将无线设备与RS232接口直接相连,从而实现数据的通信,使用这种连接方式,设备会将智能终端作为调制解调器,从而直接够使用RS-232C标准。RS232与S3C6410的电路连接图如图3所示。
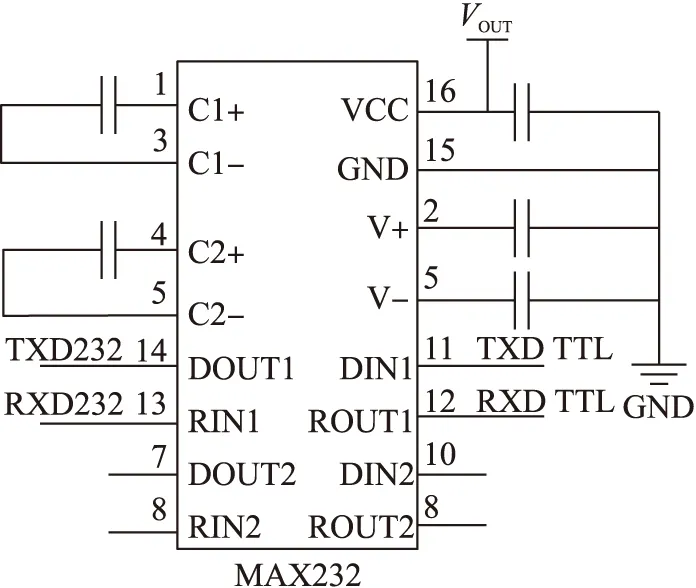
图2 MAX232工作电路
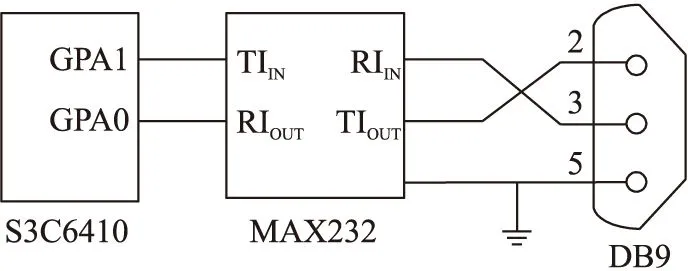
图3 RS232与S3C6410的电路连接图
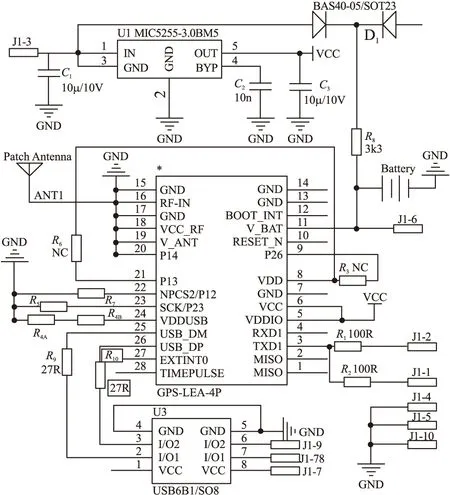
图4 NEO-5Q芯片的外围接口电路
2.3GPS定位模块
本系统采用的GPS模块是瑞士u-blox公司NE0-5Q芯片,NE0-5Q以ROM为基础构架,该芯片为多功能独立型的 GPS 模组,模块采用最新的KickStart微弱信号攫取技术,成本低,体积小,并且能够确保采用该模组的设备在任何可接收到信号的位置及任何天线尺寸都能够有最佳的初始定位以及快速定位性能。芯片的外围接口电路如图4所示。
GPS模块接收GPS定位信息,遵循NMEA-0183(默认)/UBX Binary协议标准,为常用的GPS 通讯协议。该GPS模块接收机的硬件接口能够兼容开发板的RS-232C协议串口,通过串口与ARM芯片的串口通信引脚进行连接。然后通过程序解析GPS数据包中的GPRMC数据项,以获取GPS 的经度、纬度、方向和速度等方面信息,最后将GPS定位信息通过无线传输设备发送到信息处理中心的服务器。
2.4MG323无线传输模块
无线传输模块选择华为公司推出的MG323 模块,该模块为工业级GSM/GPRS 模块[3],其内部嵌入TCP/IP 协议,具有丰富的AT 指令集,工作于 GSM950、 EGSM900、 GSM1800、 GSM1900 4个频段,实现与 Internent 的无缝连接。MG323硬件上有电源接口、RS232 接口、SIM 卡接口等。MG323的接口电路如图5所示。
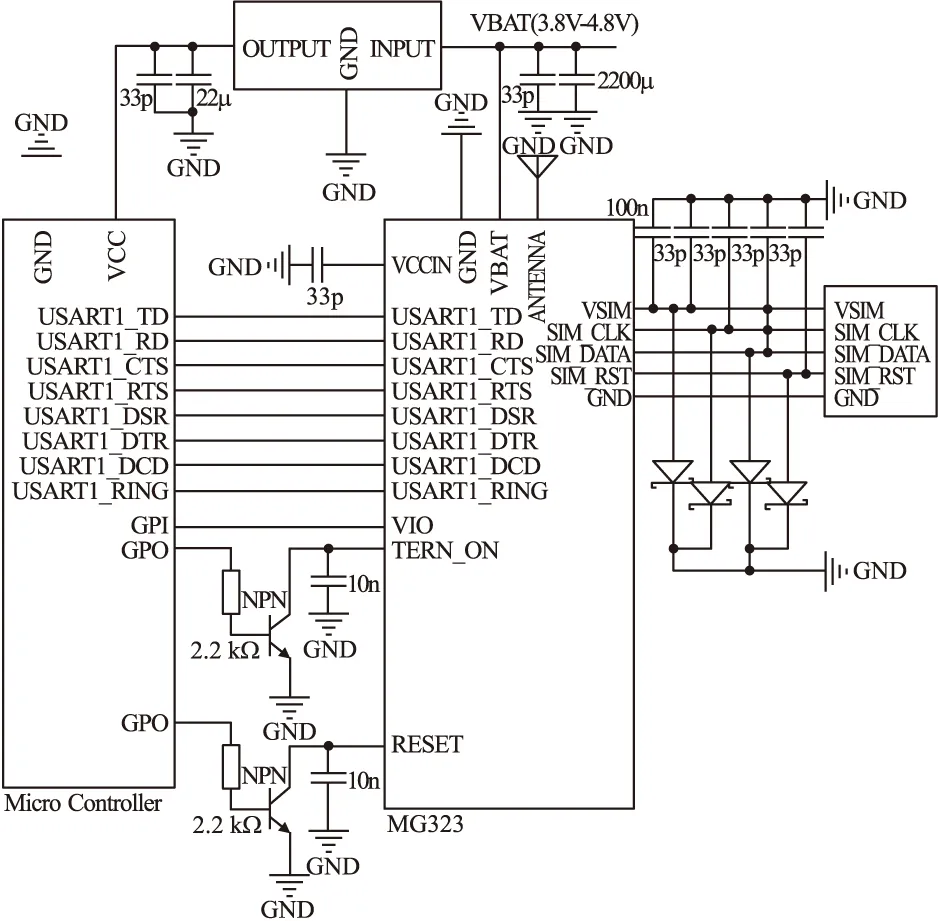
图5 MG323接口电路
MG323 模块的工作电压范围为直流 3.3 V~4.8 V[4]。在实际供电网络中,当MG323处于最大发射功率时就会引起工作电压的跌落,当电压低于3.3 V时,MG323模块就会重启,所以不建议使用边缘值电压。外部供电电压推荐使用电流输出大于1.5 A的LDO或者是开关电源,并在电源的端口处并联一个0.1 μF 的去耦电容和一个大于470 μF的旁路电容,以保证电压的稳定提供。
3 系统软件设计
系统主要是解决车载终端与交管信息处理中心的远程无线通信问题和GPS定位路段处理问题。系统采用GPRS无线模块来实现他们之间的数据通信,且均通过AT命令来控制。
系统硬件采用的是 S3C6410 主控芯片,系统则采用linux2.6.38内核,先将制作好的Uboot烧写到Nor Flash 中,然后再通过移植配置,烧录内核和文件系统,使之适合该硬件平台。应用程序软件使用C语言编写,然后经过arm-linux-gcc交叉编译之后再移植到ARM平台运行。
3.1GPRS应用程序设计
当机动车启动时,车载终端自动启动,GPRS模块把GPS测算出的地理位置坐标和相关的定位数据发送给GPRS网络,GPRS网络提供通信链路,接入Internet后,把这些定位信息传送给交管信息处理中心[5]。信息中心的服务器具有Internet静态IP地址,它通过Socket接收机和GPRS网络建立连接,实时接收来自各个车载终端的信息。
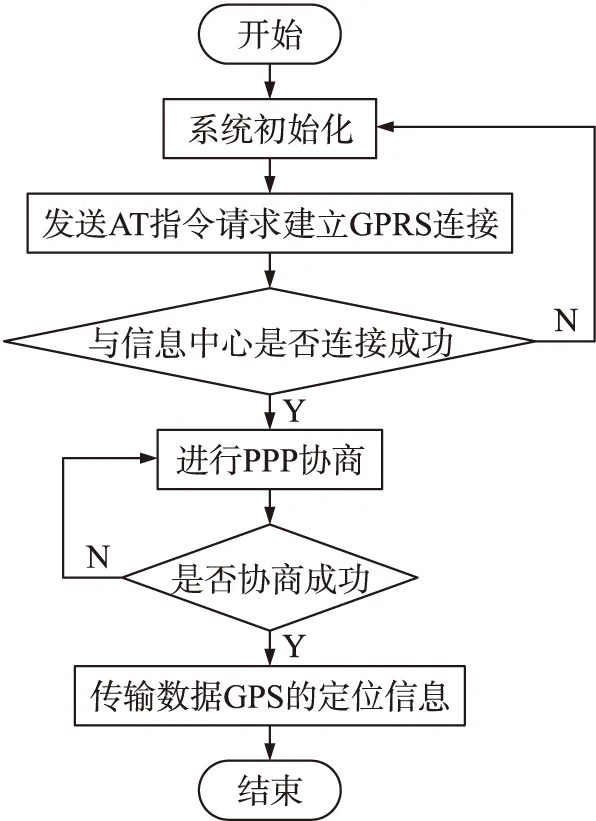
图6 GPRS应用程序设计流程图
启动Linux系统后,要通过GPRS来实现远程数据的传输,其应用程序流程图如图6所示,它主要包括以下几个步骤:第1初始化串口,包括波特率,数据位,停止位等的初始化工作。第2配置参数,GPRS通信过程中要设置的配置项和AT指令有:AT#CGD CONT=1,“IP”,“CMNET”为接入网关;AT#APNSERV=“CMNET”为设置网络接入点名称;AT # TCPSERV=“*”为上位机IP 地址设置;A T # TCPPORT=“6800”为上位机侦听端口设置。设置好这些命令参数后,系统上电时即可自动从Flash中读取相应参数。第3建立连接,AT指令“AT#CONNECTIONSTART”为请求网络连接,然后再用连接命令“AT#OTCP”即可登录远程Internet。第4则为数据传输,发送数据时,GPRS模块将接到的发送数据经过封装后直接发送到GPRS网络;接收数据时将接收到的数据帧经过协议处理模块拆封后,提取数据然后再传输给ARM终端的串口。第5即为断开连接,使用“AT # CONNECTIONSTOP”来断开GPRS连接。
3.2GPS定位路段处理方法
由于该系统对路况信息处理要求有较高的实时性,所以要求系统能快速的将机动车GPS信息定位到相应的道路上。所以本系统采用边界矩形判断法[5],选取道路的2个顶点以及描述道路形状的多个点来构成一个矩形区域,称该区域为该路段的边界矩形,如图7所示。若该路段为正东西或南北方向的直线,那么边界矩形则为路段本身。各路段里描述路段形状的点将路段分为多个子路段。对于需匹配的GPS信号,以GPS的定位误差为半径,以定位点为圆心,构造出该定位点的定位区域。在定位区域中,搜索边界矩形与定位点重叠的所有路段,得到集合A。在集合A中,计算定位点到每一个子路段的距离,找出距离最短的子路段,再根据GPS数据中的方向信息,判断出机动车所在方向。
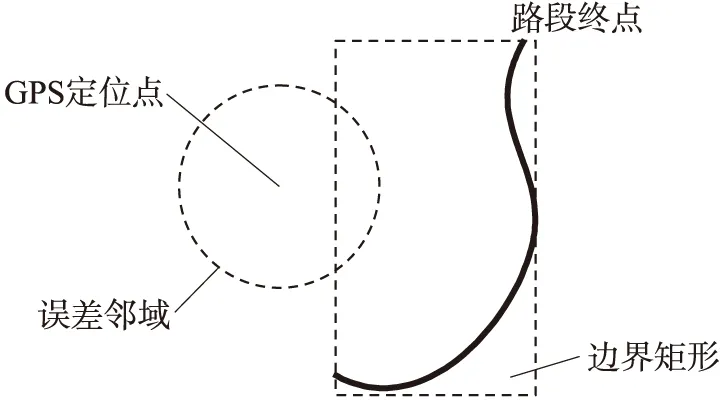
图7 道路边界矩形
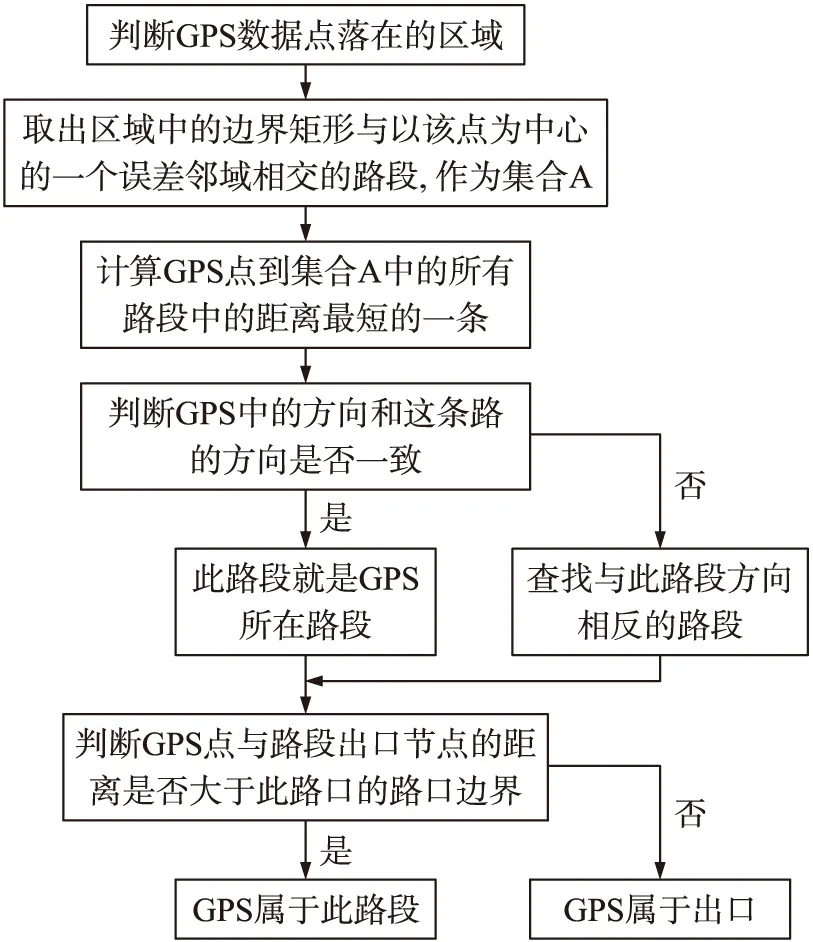
图8 GPS定位模型流程图
边界矩形法可以使地图匹配快速完成,并且能保留路段自身的形状。因此具备准确性与实时性,GPS地图匹配流程图如图8所示。
当车载终端的GPS信号被确定在限行路段中行驶时,信息中心服务器就会将该机动车该次出行信息存入数据库,并通过GPRS向车载终端发送该机动车已出行信息。
4 系统调试
由于GPRS技术成熟,而且具有较强的数据纠错能力[6],能够实现数据远距离的准确传输,所有这里我们主要测试下GPS的定位信息是否准确,因为GPS定位信息准确度是快速确定机动车所在路段的关键所在[7]。将整个系统在实验室环境下进行了调试,将具有上网功能的SIM卡插入卡槽、GPS 定位天线放到室外,将GPS和GPRS/GSM两个模块通过串口线与开发板相连。在室外选取3个不同的点对定位的精度进行测量,测量计算后的精度如表1所示。
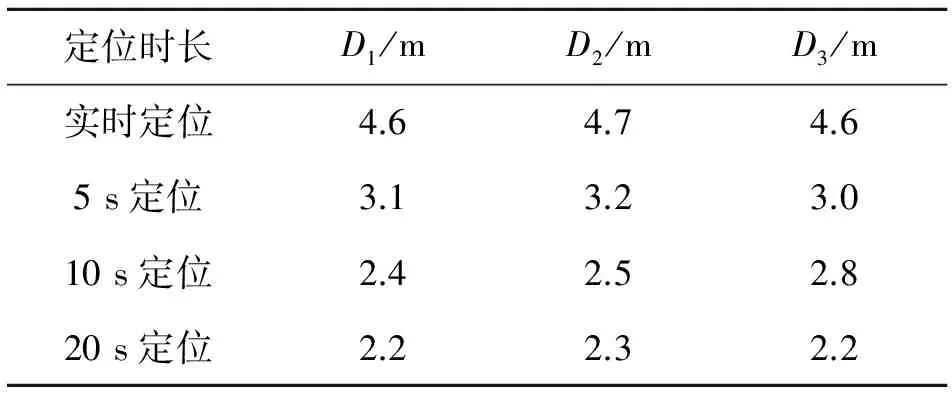
表1 3个不同的点的定位精度
由上述结果可以看出随着定位时长的增加,定位的精度越准确,最少也可以保持在5 m以内,这样的距离这对于车载终端定位足够的。而且GPS是一个可以全天候工作并且极少有工作盲区的系统[8],因此,该GPS模块用在车载定位上具有较高的可靠性。
5 结论
文章提出了基于ARM11的机动车柔性限行管理系统,分别从系统硬件设计、GPRS收发程序设计和GPS定位路段处理方法等方面来阐述其设计思路。本系统最大的优点就是解决了传统限行政策中存在的弊端,使得机动车驾驶员可以根据自己的出行需求柔性控制自己的出行情况,并且本系统使用成本低、硬件数量少、可扩展性强,为城市交通限行提供了一种新颖的方法。
参考文献:
[1]苏岳龙,姚丹亚,张毅,等.基于单双号限行措施的北京市交通需求管理策略分析[J].交通信息与安全,2009,03:28-31.
[2]陈自龙,周书杰,汤勇明.基于ARM嵌入式系统的高保真无损音乐播放器设计[J].电子器件,2012(6):692-698.
[3]刘西秀,张民,刘勇,等.基于ARM11平台的串口转WiFi/GPRS双网模块设计[J].电子器件,2013(1):80-84.
[4]鲍玉军.基于ARM与GPRS 技术的SCADA系在风光电厂中的应用[J].电子技术应用.2011,37(6):131-134.
[5]章威,徐建闽,张孜.基于出租车GPS定位技术的ITS共用信息平台实时路况信息采集及处理方法[J].公路交通科技,2007(5):125-129.
[6]侯艳波,秦会斌,胡建人.基于嵌入式和Zigbee技术的节能系统的设计与实现[J].电子器件,2012,35(6)670-673.
[7]温炉明,张哲.Windows CE下GPS导航设备的启动速度的优化[J].电子器件,2009(1):184-187.
[8]张振宇,叶甜春.都市条件下GPS信号源接收机仿真及链路分析[J].电子器件,2009(2):402-404.

张凯(1965-),男,汉,山东泰安人,南京信息工程大学信息与控制学院教授,硕士生导师,主要研究方向为智能交通、智能检测,zkark@163.com;

孙跃(1989-)男,汉,江苏淮安人,南京信息工程大学信息与控制学院硕士研究生,主要研究方向:智能交通、智能检测,sunyue3905439@163.com。
FlexibleVehicleRestrictionManagementSystemBasedonARM11*
ZHANGKai*,SUNYue,ZHOUKan,JIANGHui
(School of Information and Control,Nanjing University of Information Science and Technology,Nanjing 210044,China)
Abstract:In order to solve the problem of urban road congestion,a flexible ARM11-based vehicle limit line management system was designed.System uses S3C6410 microprocessor core,applies the GPRS wireless communication technology to transmit information to the GPS positioning information processing traffic control center server.The traffic control center to set vehicle restriction ratio by sections,and count vehicles travel days in this month at the limit line sections,feed back to the vehicle’s travel information to the car owner,charge the congestion fee for the proportion of vehicles exceeding the vehicle restriction ratio,thus we could achieve a flexible vehicle restriction management.Experiments show that GPRS to send GPS location information is accurate,timely feedback vehicle travel,system design to achieve the desired functionality and requirements.
Key words:embedded;flexible vehicle restriction;S3C6410;GPS;GPRS
doi:EEACC:014010.3969/j.issn.1005-9490.2014.05.033
中图分类号:TP368.2
文献标识码:A
文章编号:1005-9490(2014)05-0953-05
收稿日期:2013-09-23修改日期:2013-10-10
项目来源:国家自然科学基金项目(71341029)
猜你喜欢
铁道通信信号(2018年2期)2018-04-18
电镀与环保(2016年3期)2017-01-20
单片机与嵌入式系统应用(2014年9期)2014-03-11
自动化博览(2014年4期)2014-02-28