基于GPS的汽车运动参数检测与估算
2014-09-03 10:34徐巧玲
宿州学院学报 2014年9期
徐巧玲
1.安徽理工大学电气与信息工程学院,安徽淮南,232001;2.六安职业技术学院机电系,安徽六安,237158
基于GPS的汽车运动参数检测与估算
徐巧玲
1.安徽理工大学电气与信息工程学院,安徽淮南,232001;2.六安职业技术学院机电系,安徽六安,237158
针对以往汽车运动状态参数检测手段的不足,研究出一种体积小、功能集中、使用方便的便携式汽车运动状态检测设备,提升汽车行驶的安全性和汽车一次安全技术;利用GPS 模块实时采集车辆运行状态的卫星数据,并在ARM开发板上处理显示,依据这些数据信息,再结合汽车三自由度模型及相应的参数估算算法,估算出车辆的运动状态参数如汽车质点的质心侧偏角、纵向速度和侧向速度,从而为车辆一次安全控制提供依据。
GPS模块;三自由度模型;运动状态参数
1 整体硬件平台搭建
设计采用Trimble Condor GPS C2626 OEM板与ARM数据传输以及与PC机通信,确保数据能够完整的接收、发送及显示。利用PC机完成GPS定位数据采集界面应用程序的设计,并通过USB同步,植入ARM中运行,从而实现ARM与PC机之间的数据传输,最终实现各硬件模块的有机结合。记录汽车在行驶过程中的GPS定位数据,为汽车运动参数估算提供原始的有效数据[1]。系统总体框图如图1。
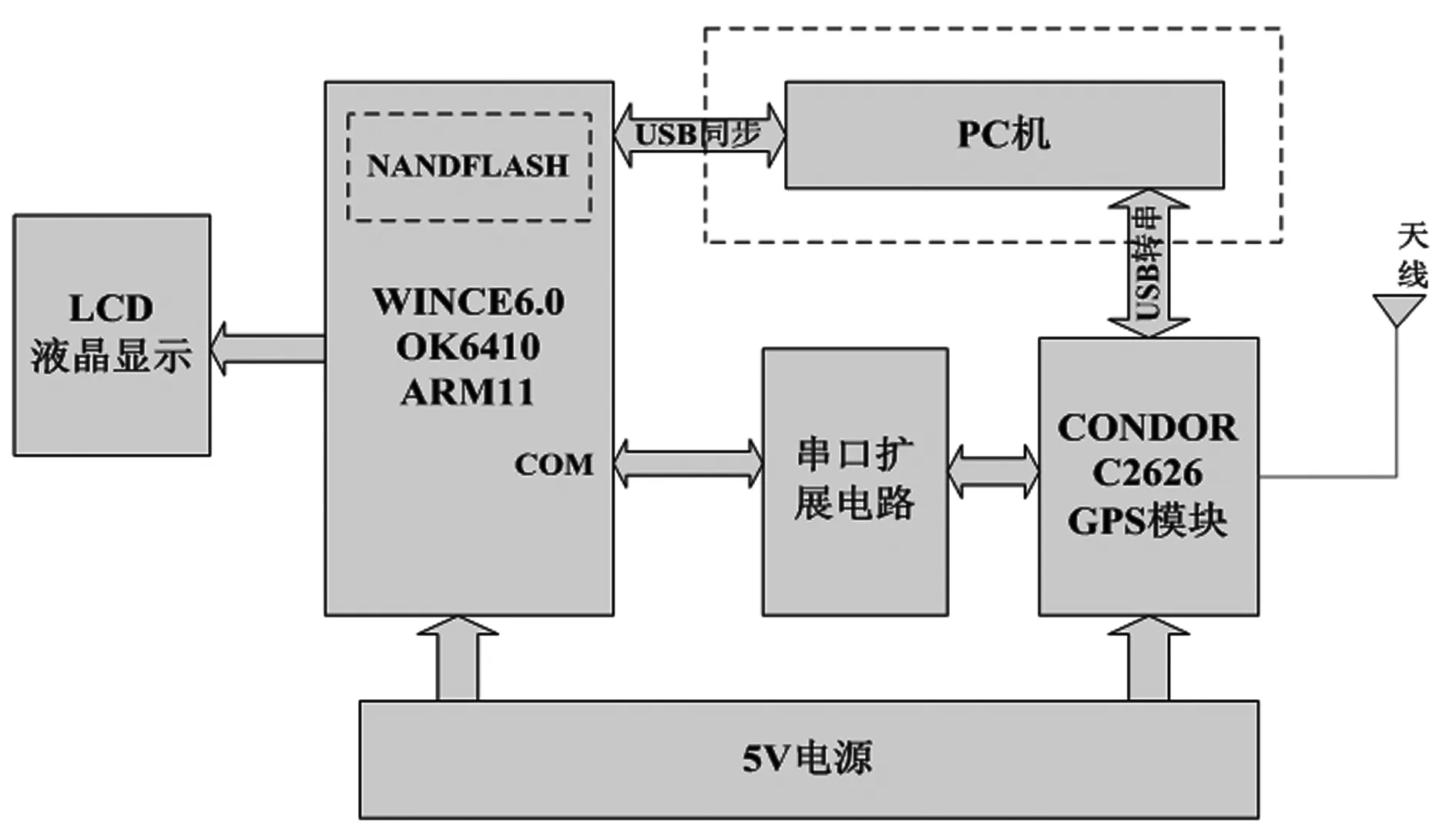
图1 系统总体框图
2 GPS信息采集系统应用程序设计
在VisulStudio2005(简称VS2005)编程环境下,开发出能够实现对GPS数据采集的应用程序界面,并通过串口,把GPS模块接收到的数据传送到采集界面适时显示、记录并保存。最后,将整个系统的各硬件连接好,调试各模块数据传输是否正常,并进行汽车性能检测,记录下汽车在行驶过程中的GPS定位数据,为汽车运动参数估算提供原始的有效数据。图2为应用程序开发程序流程图,图3为LCD液晶屏上GPS应用程序采集界面。

图2 应用程序开发程序流程图
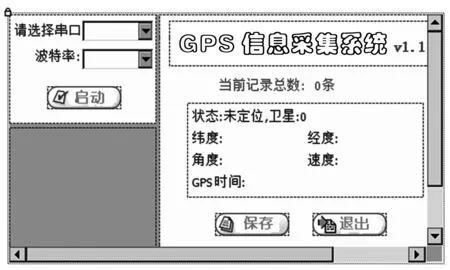
图3 LCD液晶屏上GPS应用程序采集界面
3 数据坐标转换
GPS接收机所得到的数据是基于WGS-84坐标系的经纬度(B,L)观测值,而这个系统需要的是被测试车辆的平面坐标(x,y),用于求得车辆的位置、速度等参数[3]。因此,要求得到所需的车辆实时位置坐标,也是就它的质心坐标(x,y),就需要将WGS-84坐标变成相应的平面直角坐标。坐标转换原理:如图4,设A点的WGS-84坐标(B,L):B为纬度N,L为经度E。大地坐标(X,Y):X为纬度,Y为经度。其精简坐标变换模型如下:
WGS-84坐标变成相应的平面直角坐标,通常用计算机软件来完成,但在目前常用的换算软件中存在灵活性较差,且不能成批量的数据转换,给实际工作带来许多不便[2]。而Excel完成坐标换算工作只需要在相应单元格中输入相应的函数公式即可,把相应的公式填入到相应单元格后,就可方便地把WGS-84坐标系下的经纬度转换成北京54坐标系下的平面直角坐标。转换方法是输入所有的经纬度之后,再用鼠标下拉就可以得到计算结果,如表1为Excel表格中截取的部分转换后的数据。
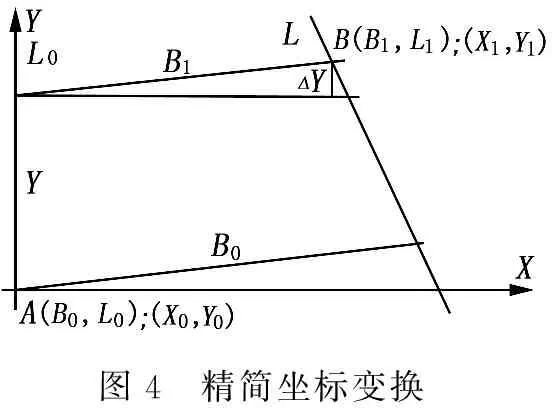
图4 精简坐标变换
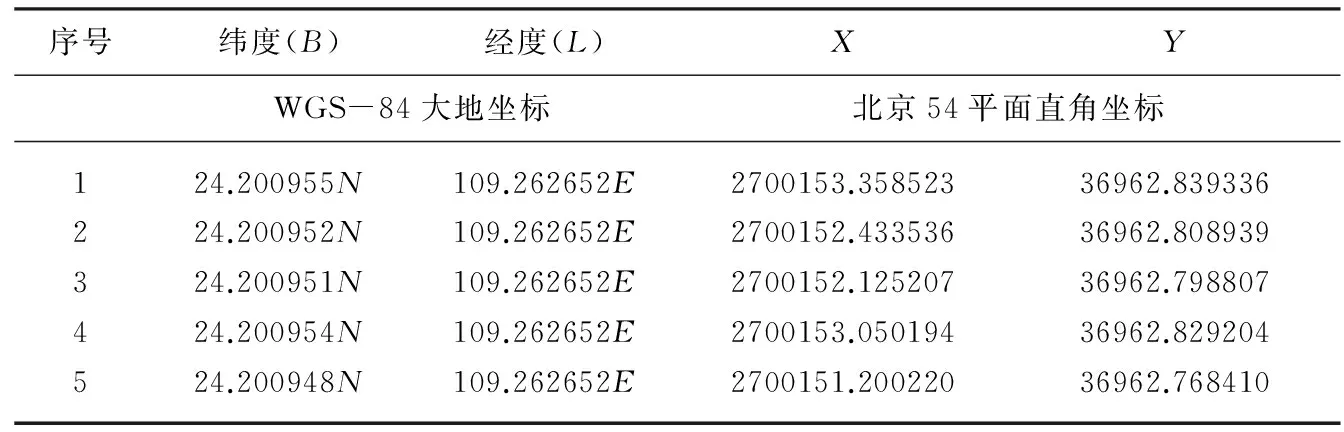
表1 坐标正算输入数据
4 汽车运动参数估算
据GPS数据采集应用程序采集到的数据信息,来估算汽车质心的速度方向角、质心侧偏角β、侧向速度vy、纵向速度vx。如图5所示,坐标系的横坐标指向东方,纵坐标指向北方,根据GPS采集到的数据进行平面直角坐标变换,可得到汽车任意时刻的质心坐标(X,Y)。设tn时刻对应第N点的坐标为(xn,yn),tn-1时刻对应的N-1点的坐标为(xn-1,yn-1),由式(1)可以得到第N点处汽车质心速度vn[3]
(1)
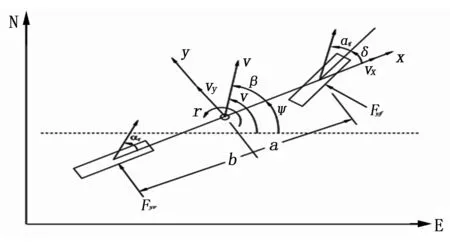
图5 汽车三自由度运动姿态模型
4.1 汽车质心速度的方向角估算
如图5,设计中,汽车质心的速度方向角是图中标出的v,依照公式(2)并考虑相应的相位关系即可计算出来。图中β表示质心侧偏角,ψ表示航向角,v表示速度方向角。
设Δx=xn-xn-1,Δyn=yn-yn-1
(2)
(1)当Δx>0,Δy>0时,计算公式为:
(2)当Δx<0时,计算公式为:
(3)当Δx>0,Δy<0时,计算公式为:

(3)
4.2 质心侧偏角的估算
取图5所示的汽车纵轴方向与E轴的夹角为汽车的航向角ψ,该航向角可由GPS数据采集系统得到。如图5所示,可得到汽车质心侧偏角β等于质心的速度方向角ν减去所测得的航向角ψ,而质心速度方向角ν可由公式(3)求得。因此,可求得汽车的质心侧偏角β。
β=ν-ψ
(4)
4.3 侧向速度与纵向速度的估算
由公式(1)可得到汽车质心速度vn,由公式(4)得到质心侧偏角β,于是便可以求出汽车的侧向速度vy与纵向速度vx,即:
vy=vn×sinβ
vx=vn×cosβ
用GPS模块实时采集车辆运行状态的卫星数据,并在ARM开发板上处理显示,依据这些数据。
5 结束语
本文根据信息,再结合汽车自由度模型及相应的参数估算算法,估算出车辆的运动状态参数,从而为车辆一次安全控制提供依据。
虽然本文在实验室环境下实现了利用GPS所采集到的汽车运动时的卫星数据信息来估算汽车行驶运动状态参数的任务,但仍然存在诸多不足之处,如估算的参数数量较少、整个数据采集系统结构较简单等。
本文所估算的汽车运动状态参数是基于三自由度汽车运动模型基础上的,但在实际应用中,汽车行驶路况比较复杂,并具有不确定性因素,建立符合实际汽车行驶路况的自由度模型相对较复杂。因此,在今后的研究中,可从以下几个方面来提高汽车运动参数估算的准确性和数据的可靠性:(1)开发出能够同时处理多块GPS模块采集的数据信息的应用程序,对多复杂路况进行检测,更真实地反应出汽车在行驶过程中的状况,这样,可估算的参数数量也相应增多。(2)采用精度更高的GPS模块,在估算汽车运动状态参数时使估算出的值可靠性更高。(3)建立多自由度的汽车运动状态模型,进一步优化算法,以得到更准确的数据。
[1]袁会东,韩峻峰,潘盛辉,等.基于WinCE的GPS数据采集系统设计[J].现代电子技术,2012,35(19):165-167
[2]谷超杰.Excel2003在高斯投影坐标换算中的应用[J].测绘与空间地理信息,2008,31(6):190-192
[3]付江华.基于GPS与陀螺仪的汽车运动性能测试[D].成都:西华大学交通与汽车工程学院,2006:52-55
(责任编辑:汪材印)
2014-05-25
徐巧玲(1984-),女,安徽潜山人,硕士,助教,主要研究方向:检测技术与自动化装置。
10.3969/j.issn.1673-2006.2014.09.023
U461.6
A
1673-2006(2014)09-0076-03
猜你喜欢
南京工程学院学报(自然科学版)(2022年2期)2022-08-16
汽车实用技术(2022年14期)2022-07-30
土木建筑与环境工程(2022年4期)2022-05-14
北京航空航天大学学报(2021年4期)2021-11-24
农业工程(2021年6期)2021-07-29
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
实验流体力学(2018年6期)2018-02-13
航天器工程(2014年5期)2014-03-11