
变电站巡检机器人运动控制系统研究
2014-09-02 01:28朱兴柯李雪松
机电信息 2014年30期
朱兴柯 叶 飞 李 斌 李雪松
(1.云南电网公司普洱供电局,云南 普洱 665000;2.山东鲁能智能技术有限公司,山东 济南 250101)
变电站巡检机器人运动控制系统研究
朱兴柯1叶 飞2李 斌1李雪松2
(1.云南电网公司普洱供电局,云南 普洱 665000;2.山东鲁能智能技术有限公司,山东 济南 250101)
针对变电站特殊的应用环境,为保证巡检机器人的运行可靠性和停车定位精度,研究设计了变电站巡检机器人运动控制系统。重点论述其行走方式、引导与定位方式、系统软硬件设计、运动控制算法等。通过磁轨迹引导与RFID定位,确定机器人本体姿态和位置,简单可靠,定位精度高,抗干扰能力强。通过两驱动轮差速,两万向轮随动,跟踪磁轨迹,执行运动控制指令,控制灵活,可靠性高。采用S曲线加减速、比例微分寻磁、分段补偿等运动控制算法,运动冲击小,控制误差小。经过工程验证,设计的运动控制系统能够满足变电站巡检机器人的应用要求。
变电站;巡检机器人;运动控制;算法
0 引言
随着社会经济快速发展,电力需求日益增长,电力系统自动化要求日益提高。变电站人工巡检方式存在劳动强度大、实时性差、管理难、数字化不便等缺陷,已经不能满足智能电网的发展要求,也不符合技术发展的趋势。机器人巡检逐步替代人工巡检已经成为电力系统自动化的应用重点[1-3]。
变电站智能巡检机器人整合机器人技术、电力设备非接触检测技术、多传感器融合技术、模式识别技术、导航定位技术,采用自主或遥控方式对变电站室外一次设备进行可见光、红外、声音等检测,对巡检数据进行对比和趋势分析,及时发现电网运行的事故隐患和故障先兆,如异物、损伤、发热、漏油等。能够实现变电站全天候、全方位、全自主智能巡检和监控,有效降低劳动强度及变电站运维成本,提高正常巡检作业和管理的自动化和智能化水平,为智能变电站和无人值守变电站提供创新型的技术检测手段和全方位的安全保障,具有广阔的发展空间和应用前景。变电站巡检机器人现场运行如图1所示。

图1 变电站巡检机器人现场运行图
运动控制系统负责解决变电站巡检机器人运动与追踪的核心问题,其性能参数直接影响机器人运行的稳定性和停车定位精度,进而影响获取电力设备状态数据的准确性,最终影响检测结果的可信度。目前已有的变电站巡检机器人运动控制系统主要存在的问题在于可靠性较差、停车定位精度不高、不能完全满足变电站设备巡检的应用要求。本文针对变电站特殊的应用环境,研究设计了巡检机器人运动控制系统。重点论述行走方式、引导与定位方式、系统软硬件设计、运动控制算法等[4-5]。
1 行走方式
行走方式选择关系到运动控制系统的控制策略,是巡检机器人在变电站路况环境下高速高精度稳定运行的重要基础。巡检机器人的行走方式主要有轮式和履带式。
1.1 轮式
轮式机构是应用最广泛的行走方式之一。轮式机构具有移动灵活、机械结构简单、机械效率高、运动控制相对容易等优点。在相对平坦的地面上,轮式机构具有突出优势,运行速度较高。但是轮式移动机构越过壕沟、台阶的能力较低。由于与地面接触面积小,其在比较柔软、光滑的路面易发生沉陷或打滑现象。
1.2 履带式
履带式移动机器人支撑面积大,接地比压小,在松软或泥泞场地作业,通过性能好。主要应用于负载较重、地面崎岖、需要越沟坎、爬楼梯的场合。履带式移动机器人的缺点主要有运行速度相对较低、转向不灵活、减振性能差、运动噪声较大、功耗大,而且对地面有较大的剪切破坏作用,当地面环境恶劣时,履带可能磨损甚至磨断。履带机械结构复杂,整体重量大,行走功耗也相对较大。
通过对巡检机器人行走方式的长期跟踪研究,从地形适应能力、运行速度、控制精度、功耗、技术成熟度和可靠性、生产加工便利性、设计难易程度等角度综合分析,在变电站地面相对平坦的情况下,巡检机器人行走系统适宜采用轮式结构。本文采用两轮差速驱动,两轮万向随动,具有结构简单、控制灵活、运行速度较高等突出优势[6]。
2 引导与定位方式
在变电站巡检任务中,机器人按照规划路径行驶,在指定位置停靠,进行设备检查。整个运行过程完全自动化,无需人工干预。运行控制系统要保证机器人不偏离轨道,准确停靠,必须依靠辅助装置提供地理信息。本文中运动控制系统通过磁轨迹引导与RFID定位,获取机器人的位置和姿态信息,原理示意图如图2所示。
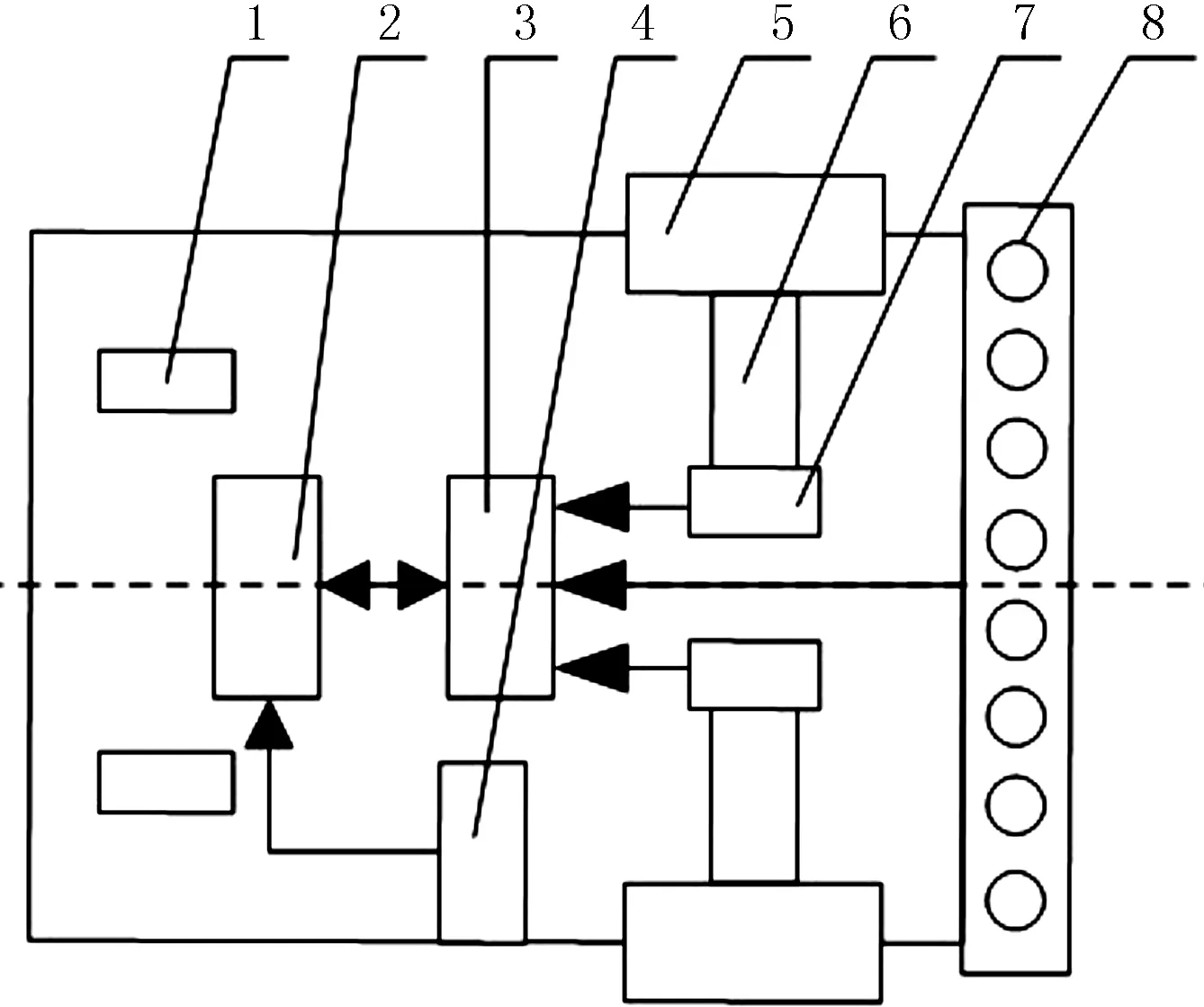
图2 巡检机器人引导与定位方式原理示意图
在规划的机器人巡检路线下铺设磁条,由机器人前部的磁传感器阵列检测机器人相对于磁轨迹的偏移。根据偏移信息,电机驱动控制模块控制驱动轮差速,万向轮随动,调整机器人运行姿态,跟踪磁轨迹。在巡检路线的相应位置预埋RFID标签,RFID标签的串号与地理位置一一对应。机器人运动时,RFID读卡器读取标签串号并上传给工控机。工控机根据标签串号判断机器人所处位置,下发停车、转弯、调速等相应控制指令给电机驱动控制器,进行运动状态调整。磁轨迹引导与RFID定位简单可靠,精度较高,对传感器要求低,抗干扰能力强[7]。
3 系统硬件设计
运动控制系统硬件构成如图3所示,主要包括CPU控制器、PWM信号输出、电机驱动器、编码器采集模块、外部存储、串口通信、磁传感器与接口转换模块等[8]。
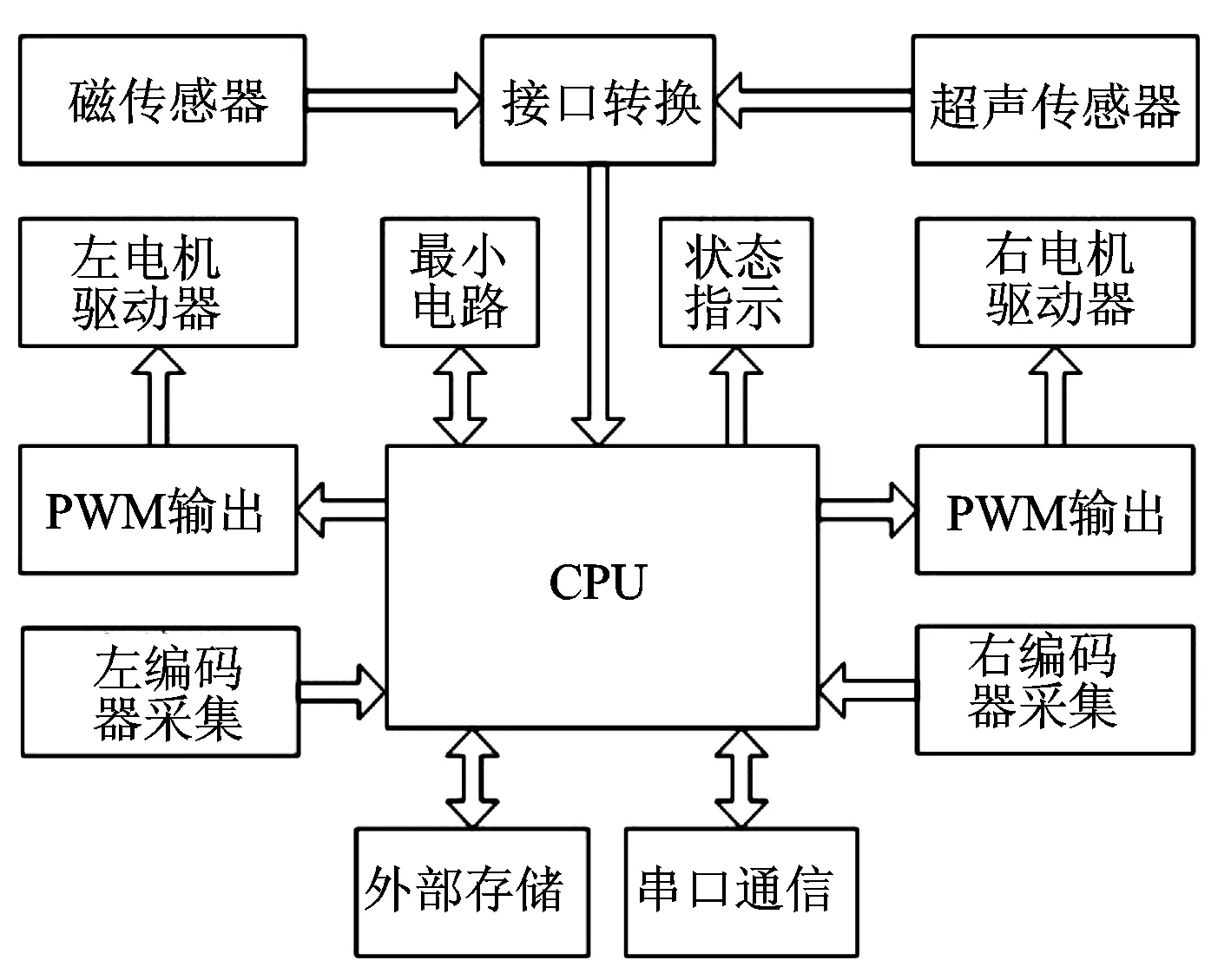
图3 运动控制系统硬件框图
主要组成部分功能如下:(1) CPU控制器:采用高性能、低功耗、宽电压的8位微处理器ATmega128L,工作于16 MHz时性能可达16 MIPS。外设丰富,完全满足系统功能要求。(2) 串口通信:通过串口与上位工控机进行信息交互。(3) PWM输出和编码器采集:PWM信号经过施密特触发器后接入驱动器,控制永磁无刷直流电机。电机编码器Z相信号经施密特触发器接入CPU中断源,计算一般行驶距离。B相脉冲经施密特触发器接入CPU中断源,计算停车定位距离。A/B相信号经D触发器接入CPU普通I/O引脚,判断运动方向。(4) 磁传感器和超声传感器:经过接口转换,磁传感器信号和超声传感器信号接入CPU,判断机器人运行姿态和障碍物情况。(5) 外部存储器:存储配置信息和故障记录等。采用256 kB非易失性存储器,内置实时时钟、看门狗、电压监测等功能。
4 系统软件设计
运动控制系统接收上位机控制命令后,进行解析,执行命令并反馈状态。执行完成后,继续等待新命令到来。根据运动控制系统功能要求,对软件进行模块划分,如图4所示。主要包括速度计算模块、距离计算模块、运动控制模块、寻磁算法模块、停障算法模块、串口通信模块、事项存储模块、实时时钟模块等[8]。
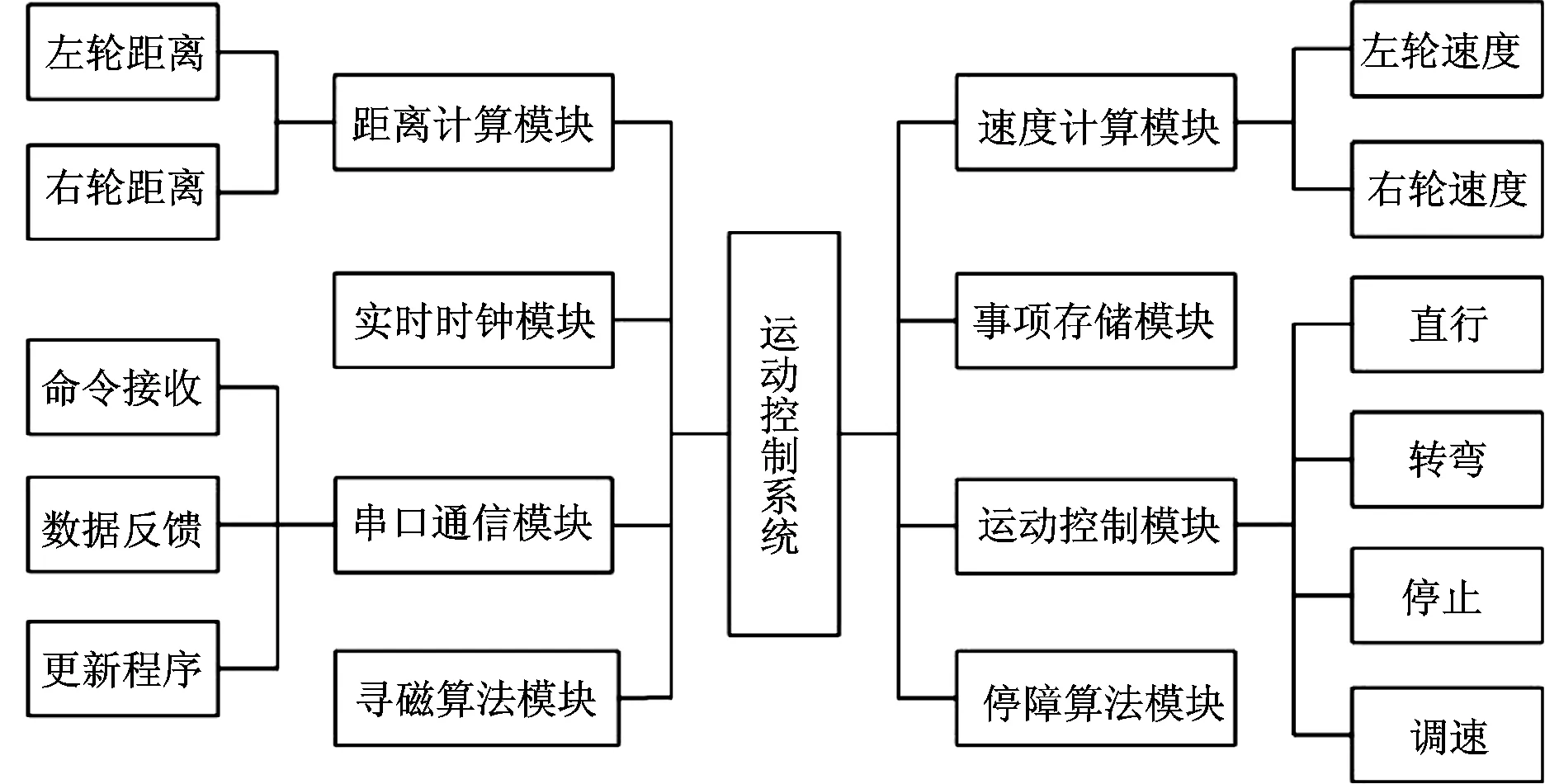
图4 软件功能模块划分
各模块主要功能如下:(1) 速度计算模块:根据编码器信号,判断电机方向和速度。(2) 距离计算模块:根据编码器信号,判断从指定时刻或位置开始的电机行驶距离。(3) 运动控制模块:控制机器人运动状态,如直行、转弯、停止、调速等。(4) 寻磁算法模块:根据磁传感器信号,计算机器人相对磁轨迹的偏离程度。(5) 停障算法模块:根据超声信号,判断有无障碍,避免发生碰撞事故。(6) 串口通信模块:按照一定的通信协议,与工控机进行信息交互。(7) 事项存储模块:以事项形式非易失性存储命令执行和异常发生时的状态。(8) 实时时钟模块:提供日期和时间信息,可软件校时,防掉电丢失。各功能模块共同构成运动控制系统软件,完成命令处理、信息反馈、运动控制等任务。各模块不是孤立存在的,而是紧密联系、相互协作的,如运动控制模块中就必须调用寻磁算法模块。
5 运动控制算法分析
5.1 S曲线加减速算法
巡检任务中,机器人在检测点位置频繁启停,如果没有合适的加减速算法,很容易产生抖动,影响电机寿命,定位精度也难以保证。本文选择S曲线加减速算法控制启停,保证机器人平滑稳定运行,降低机械零件的磨损,提高可靠性。因为系统速度变化曲线呈S形,所以称为S曲线控制算法,这是一种速度和加速度变化都非常平滑的加减速运动控制算法。一个完整的S曲线应包括加加速、匀加速、减加速、匀速、加减速、匀减速和减减速7个阶段。
5.2 比例微分寻磁算法
机器人底盘前方固定有8个磁传感器,组成磁传感器阵列。磁传感器检测到磁信号后,输出高电平。通过对磁传感器进行位置编码,为寻磁算法比例调速环节提供支持。将单个磁传感器位置从左至右进行权值编码。当相邻磁传感器同时亮起时,位置编码进行加权计算。为保证机器人跟踪磁轨迹快速平稳,寻磁算法还引入微分调速环节。根据机器人相对磁轨迹的偏离趋势提前反应,及时调整左右轮速度,每5 ms存储一组磁传感器偏离数据,共存储100组,并通过平滑滤波去除干扰。
5.3 分段补偿误差算法
机器人的定位精度受诸多因素影响,比如读卡器读取RFID标签的位置和速度、控制算法的误差等。经测试,机器人的运动误差随速度增加会放大。通过进一步采用分段补偿误差措施,提高不同速度情况的定位精度。使机器人在1.2 m/s速度下定位误差小于2 cm,工程应用效果良好。
5.4 脉冲计数转换算法
机器人直行指定距离和以1/2驱动轮轮距为回转半径转过指定角度,都是通过计算转换编码器脉冲数实现的。电机每转一圈编码器输出500个B相脉冲。驱动轮周长为88 cm,齿轮减速比为43。即机器人直行1 cm距离对应43×500÷88=244个编码器B相脉冲。当2个驱动轮速度大小相等、方向相反时,机器人以驱动轮轮距中心为圆心原地转弯。驱动轮轮距为49.2 cm,当原地回转360°时,驱动轮走过的距离为π×49.2=154.5 cm,即每转过1°对应的B相脉冲数为(154.5÷360)×244=105个。
6 结语
巡检机器人实现了变电站全天候、全方位、全自主智能巡检和监控,为智能变电站和无人值守变电站提供了创新型的技术检测手段和全方位的安全保障,具有广阔的发展空间和应用前景。
本文介绍的变电站巡检机器人运动控制系统采用磁轨迹引导与RFID定位,两轮驱动差速,两轮万向随动,结构简单,可靠性高,控制灵活,抗干扰能力强。采用S曲线加减速、比例微分寻磁、分段补偿误差等运动控制算法,运动冲击小,停车定位精度高。经工程验证,能够满足变电站巡检机器人的应用要求。
[1] 高青,冯李军,张鹏.智能巡检机器人的研究[J].电气时代,2012(4)
[2] 卞琳.基于无线通信技术的智能巡检系统的应用研究[D].北京:华北电力大学,2012
[3] 毛琛琳,张功望,刘毅.智能机器人巡检系统在变电站中的应用[J].电网与清洁能源,2009(9)
[4] 李静.变电站智能巡检系统研究[D].青岛:青岛理工大学,2012
[5] 厉秉强,张海龙,杨墨,等.基于移动机器人的智能化变电站视频综合监控系统:中国,201120274352.8[P].2012-02-08
[6] 侯国庆.移动机器人行走系统的运动学分析和稳定性研究[D].天津:河北工业大学,2007
[7] 杨墨,隋天日,曹涛,等.变电站巡检机器人自动充电系统[J].制造业自动化,2013(3)
[8] 栾贻青,孙大庆,曹涛,等.变电站智能巡检机器人多传感器融合的组合定位系统:中国,202058039[P].2011-11-30
2014-09-04
朱兴柯(1976—),男,云南会泽人,高级工程师,研究方向:变电运行管理和基于智能机器人的设备巡视。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
中国新技术新产品(2020年4期)2020-05-05
成都信息工程大学学报(2018年3期)2018-08-29
制造技术与机床(2017年6期)2018-01-19
科技创新导报(2016年27期)2017-03-14
电子器件(2015年5期)2015-12-29
电源技术(2015年9期)2015-06-05
电测与仪表(2014年13期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
