轴孔内的同轴定位机构
2014-08-31 09:48:32程显东
山东工业技术 2014年21期
程显东
(吉林省自考办,长春 130033)
近年来,随着科学技术的不断发展,各种光学仪器得到了广泛应用。光学测量装置在一些领域中也成为不可缺少的装置,并且在测量过程中,对其精度具有较高的要求。同时,由于光学测量结果的主要影响因素为测量装置在轴孔中的定位精度,因此,对装置的定位机构也会提出很高的要求。目前常用的定位机构有孔配合、弹性支点和锥孔配合三种,这三种机构都存在各自的缺点,因此,为了克服现有定位机构所存在的不足,本文提出了一种适用于孔轴内的新型同轴定位机构,可以实现较高精度的测量。
1 原理
对于一个尚未定位的工件而言,工件在空间存在六个自由度,这六个自由度分别为即沿x、y、z三个直角坐标轴方向的移动自由度,以及绕三个坐标轴的转动自由度。因此,要完全确定工件的位置,就必须消除这六个自由度。通常采用的方法是在轴孔中选择六个分布合理的支承点来限制待测工件的自由度,该原理即称为六点定位原理,其示意图如图1所示:图上A、B、C三点均匀分布在圆周上确定唯一的外接圆圆心O,A′、B′、C′三点均匀分布在圆周上确定唯一的外接圆圆心O′,则两个圆心的连线OO′就是工件的结构轴线。
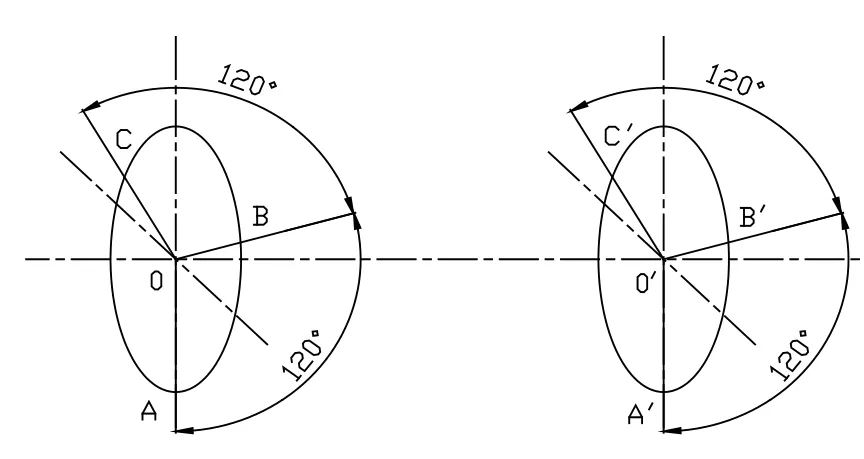
图1 六点定轴原理示意图
2 基本机构
本文提出的装置结构如图2和图3所示,分别由内筒、涨筒和对丝螺杆以及两个涨套六个部分组成。其中,装置的对丝螺杆由两段螺距相同、旋向不同且不等径螺杆组成,与弹性爪相连的是两个涨筒,两个涨筒的一个端面都分别与对丝螺杆相连接,长度方向上较短的为短涨筒,与近端弹性爪相连,较长的为长涨筒,与远端弹性爪相连。涨筒的离螺纹端向外凸起形成外锥面,与弹性爪内锥面靠合紧密,两个锥面的锥度基本相同。装置工作时,单向旋转对丝螺杆,由于粗细两段螺杆及与之配合的长短涨筒的螺纹旋向相反,导致外锥面运动方向相反,内外锥面刚性接触,将长短涨筒的轴向作用力转变成径向作用力,使弹性爪同时向外运动,爪顶运动量由内外涨筒的轴向相对运动量决定,又由于内外涨筒与弹性爪都是刚性的,涨紧后三点即可与轴孔紧密接触。由锥面在三爪处锥度一致、螺纹螺距相同的两个前提下,对丝螺杆在外力作用下单向旋转一定角度,就保证了长短涨筒沿轴方向移动距离相同,弹性爪端沿径方向移动距离也相同。由于弹性爪近轴部分设计成扁平形状,使得弹性爪单爪都具有弹性,在设计上考虑到弹性爪具有微量变形的同时还需要有一定的刚性,故而设计弹性变形量只有1mm左右,所以装置只适用于同一型号的轴孔。两个涨套的设计与涨筒的设计相互对应,各具有三个120°均匀分布的弹性爪,爪端设计成球面,球面半径小于待安装的轴孔内径,这样爪顶端与轴孔的内壁接触时为点接触,实现了装置与轴孔的三点接触,前后端的弹性爪各自确定了一个圆心,由前后两个三点分别确定的两个圆心,两个圆心连接起来形成的直线就代表了装置的轴线,且由于弹性爪与轴孔内面紧密接触,就实现了轴孔内装置与轴孔的同轴定位目的。

图2 轴孔内同轴定位机构剖视示意图

图3 轴孔内同轴定位机构外部立体图
3 结束语
本文所提出的新型定位机构,由于其起支撑作用的弹性爪与轴孔间的接触均为刚性接触,因此较其他定位装置而言,可承受更大的负荷,这样就可以保证在震动或其他复杂情况下,都可使测量装置与待测轴孔具有更高精度的同轴状态。同时,机构上的各弹性爪之间受力均匀,这样既可保证其与轴孔内壁时刻保持涨紧状态,该状态所提供的巨大摩擦力即可使测量装置在测量过程中稳固固定,进而使测量装置能够满足很多领域对高同轴度的要求。
[1]成大先主编.机械设计手册[S].北京:化学工业出版社,2002.
[2]马宏,王金波主编.误差理论与仪器精度[M].北京:兵器工业出版社,2007.
[3]庞振基,黄其圣主编.精密机械设计[M].北京:机械工业出版社,2000.
猜你喜欢
冶金设备(2021年2期)2021-07-21 08:44:28
家庭影院技术(2021年3期)2021-05-21 02:15:12
冶金设备(2019年6期)2019-12-25 03:08:46
汽车实用技术(2019年21期)2019-11-22 08:29:16
汽车实用技术(2019年7期)2019-04-18 07:55:52
制造技术与机床(2018年8期)2018-10-09 08:27:28
哈尔滨工程大学学报(2016年11期)2016-12-12 10:47:41
锻压装备与制造技术(2015年2期)2015-06-26 09:00:30
淮北师范大学学报(自然科学版)(2014年4期)2014-07-04 06:21:46
柴油机设计与制造(2014年4期)2014-03-06 09:07:25