基于改进型限幅平均滤波法的高精度称重系统研究*
2014-08-29 11:47:52文常保高丽红方吉善巨永锋李演明长安大学电子与控制工程学院微纳电子研究所西安710064
传感技术学报 2014年5期
文常保,高丽红,方吉善,巨永锋,李演明(长安大学电子与控制工程学院微纳电子研究所,西安710064)
基于改进型限幅平均滤波法的高精度称重系统研究*
文常保*,高丽红,方吉善,巨永锋,李演明
(长安大学电子与控制工程学院微纳电子研究所,西安710064)
针对称重传感器采集数据过程中干扰信号对电子称重系统测量精度的影响,提出了一种基于改进型限幅平均滤波法的高精度称重系统的设计方案。该称重系统由数据采集、模数转换、处理器、存储单元、控制模块以及显示模块组成。并将限幅滤波法、中位值滤波法、滑动平均滤波法相结合,提出了既可消除采集数据中偶然性脉冲,又可抑制周期性干扰的改进型限幅平均滤波算法。通过对5 kg~50 kg重量范围内8组不同目标重量的测量实验,将使用与未使用该改进型限幅平均滤波法的称重系统进行了对比测试和分析。实验结果表明,使用该算法后系统的最大误差率为0.1%,比未使用该算法的系统精度提高了9倍。
传感器;称重系统;滑动平均滤波;限幅滤波;数据采集;高精度
作为一种重要的计量设备,称重系统已被广泛应用于制药、化学、食品、运输与物流等众多行业[1-3]。但称重系统在使用过程中,不可避免的会受到一些来自于系统本身和外界环境中的周期性、非周期性干扰信号的影响,如静电感应干扰、电磁感应干扰、漏电流干扰、射频干扰等感应干扰[4-5]。此外,工作环境中的机械设备干扰、热干扰以及化学干扰等[6]也会对称重系统造成干扰,从而引起偏差,降低测量的精度。因此,有效抑制或消除数据采集过程中各种干扰信号及因素的影响,对于提高称重系统精度具有重要意义。
目前处理干扰信号的解决方法主要有硬件电路和软件算法2种途径[7-8]。硬件电路主要是通过增加硬件滤波器来抑制输入端干扰[9],并通过硬件电路设计使电路具备抗干扰能力。这种设计尽管可以抑制大部分干扰,但由于硬件滤波器有固定的截止频率,而且滤波器矩形系数不理想,精度相对较低,因此不能完全抑制来自系统本身以及外界的干扰。
软件算法是一种针对干扰信号的特点,采用限幅滤波法[10]、中位值滤波法以及滑动平均滤波法[11-12]等算法,滤除掉来自称重系统及外界环境的干扰信号的一种方法。这种方法具有精度高、处理功能强、灵活性和可靠性强,不受周围环境温度的影响等优点。但是软件算法存在设计复杂,而且占用计算内存与处理器资源也比较多,如果单纯依靠软件滤波则会严重影响系统的运行速度与工作效率。
针对目前影响称重系统测量精度的干扰问题,提出了一种通过硬件电路设计与软件数字滤波算法相结合,用于抑制称重系统中的波动和干扰信号,提高测量精度的基于改进型限幅平均滤波法的高精度称重系统。
1 称重系统及算法设计
1.1 称重测量系统设计
所设计的称重测量系统主要由数据采集、模数转换、处理器、存储单元、控制模块以及显示模块组成。系统整体硬件设计框图如图1所示。
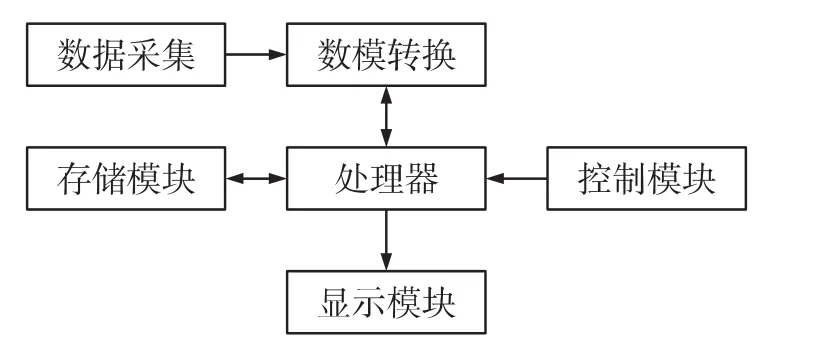
图1 称重测量系统硬件设计框架图
数据采集模块采集到信号,经过A/D转换后,由处理器进行信号处理,并将处理之后的信号进行显示,控制模块可以完成称重系统的设置,实现人机交互。
供电系统的抗干扰设计,主要是为了抑制电源的尖峰脉冲。对电源进行稳压处理,并加滤波电路,降低电源噪声对系统产生的影响;将数字部分及模拟部分分开供电,并且数字地和模拟地分离,减少耦合噪声路径;在传感器信号输出端及电源线上加屏蔽珠,屏蔽传导型高频电磁干扰;采用隔离变压器,提高系统的抗共模干扰的能力;在每个模拟IC的电源端加去耦电容,减小IC对电源的影响。
信号传输通道的抗干扰设计中,采用光电耦合抑制尖峰脉冲和各种噪声干扰;采用一阶低通RC滤波器,实现对信号进行按频率选择,削弱高频噪声信号干扰;布线时避免小于90°的折线,减少高频噪声发射。
数据采集模块采集到的称重信号主要在mV级别,需要传感器有很高的精度和灵敏性。电容式压力传感器虽然精度和灵敏性较高,但是稳定性差,对环境要求苛刻;压电式压力传感器稳定性好,但是不适合大量程测量;电阻应变式传感器精度和灵敏度较高,稳定性好,对测量环境要求不太严格等优点,因此本设计采用电阻应变式传感器,实现信号采集工作。
在数模转换模块的电路设计上,主要是对各类称重传感器mV级微弱信号进行信号放大、A/D转换、滤波等。选择使用高精度低噪声的称重专用型A/D器件,能够对为包括秤重传感器在内的各类桥接传感器应用提供完整的前端解决方案。
1.2 改进型限幅平均滤波算法
在进行截骨之前,先置入内固定器械,然后再进行椎板切除,椎弓根螺钉置入范围包括截骨区域及其上下共3个椎体。椎板切除范围应包括计划截骨区域上下各1个节段,这样能有效防止截骨过程中脊髓的皱褶、短缩。完成椎板切除术后,应去除一半或者全部的横突,以获得从侧方进入椎体的空间。上位椎体的下关节突和下位椎体的上关节突应该各去除一半,以保证在截骨闭合后这个空间能同时容纳上下2条神经根走行。然后用磨钻或者骨凿去除两侧的椎弓根,这个过程中一定要注意保护硬膜和上下神经根。在以上操作过程中,通常需要放置一根临时棒以保证截骨闭合前脊柱的稳定性,避免脊髓的皱褶、短缩。
称重系统在硬件电路设计中,为了消除干扰,提高系统的测量精度,采用了屏蔽、隔离、RC滤波等措施和器件,但是这些通过硬件电路进行抑制干扰的方法,在系统电压漂移、温度漂移和奇异性信号处理方面仍然存在很多不足。因此,这里在硬件电路设计的基础上,进一步对A/D器件采集到的数据通过数字滤波处理的方法提高称重测量系统的精度。
在实际称重系统应用中,通常会受到周期性的干扰信号与不规则的非周期性随机信号的影响。这两类不同性质的干扰信号,由于其自身特点不同,所以在系统中多采取的滤波对策也会有所不同。
目前提出的滤波算法中,限幅滤波法、中位值滤波法可以有效消除由于偶然因素引起的脉冲干扰,但无法抑制那种周期性的干扰,平滑度差;滑动平均滤波法对周期性干扰有良好的抑制作用,平滑度高,但对偶然出现的脉冲性干扰的抑制作用较差,不易消除由于脉冲干扰所引起的采样值偏差[12]。而高精度称重系统要求,既要滤除偶然出现的脉冲性干扰,又要抑制周期性干扰。
通过以上分析,本设计将限幅滤波法、中位值平均滤波法和滑动平均滤波法相结合,提出了改进型限幅平均滤波算法。算法流程图如图2所示。
在改进型限幅平均滤波算法流程图中,Wn为在AD中读取出来的第n次采样值。每次采样到新值时均需判断:若本次采样值与历史采样平均值相差小于系统设定的最大采样偏差值,则本采样值有效;若本次采样值与历史采样平均值相差大于最大采样偏差值,则本次采样值无效,丢弃本次采样值,选取历史采样平均值作为本次采样值。因此,通过限幅滤波的采样输出值Gn为

式中,Wn为本次采样值;Wc为历史采样平均值;WA为系统设定的最大采样偏差值。
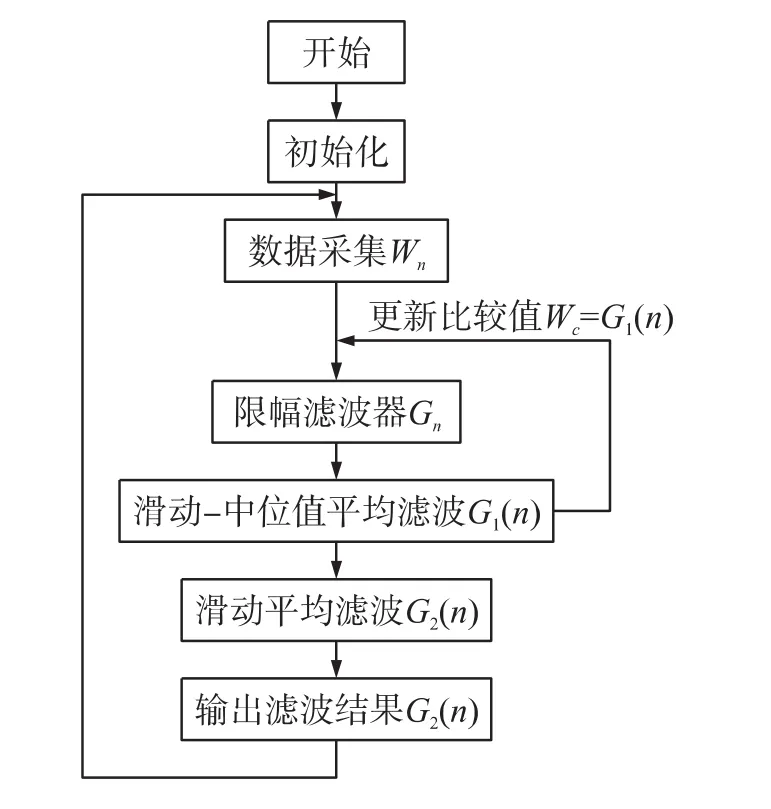
图2 改进型限幅平均滤波算法流程图
将经过限幅滤波算法的采样输出值送入队列中进行滑动-中位值平均滤波处理,即连续采集N1个测量值,把这N1个值看成长度固定的一个队列,每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据(先进先出原则)。再去掉队列中一个最大值和一个最小值,然后计算剩下的(N1-2)个数据的算术平均值,作为最新的滤波输出,并且更新为历史采样平均值。经过滑动-中位值平均滤波处理的采样输出G1(n)为

式中,Gn-i为经过限幅滤波的第(n-i)次采样输出值,G(n-i)max、G(n-i)min分别为队列中采样值的最大值和最小值。
滑动平均滤波属于低通滤波,多次采用可使截止频率变得更小,即可以滤掉频率相对较低的高频信号,因此为了提高称重系统的稳定性,算法采用了二次滑动平均滤波,其滤波输出G2(n)为

本次滤波结果G2(n),作为本次采样的最终输出值。
改进型限幅平均滤波算法是在将限幅滤波法、中位值平均滤波法和滑动平均滤波法相结合的基础上提出的,这样也融合了以上算法的优点,掩盖了其不足。改进型限幅平均滤波算法既可消除由于偶然出现的脉冲干扰所引起的采样值偏差,又可对周期性干扰起到良好的抑制作用。
2 实验及结果分析
为了对设计系统进行测试,通过标准砝码加载到传感器的承重受力端的方式,来进行测量实验。所采用的传感器为LDCZL-BH型称重传感器,其量程为50 kg,灵敏度为2.0 mV/V,非线性误差为满量程的0.02%。根据以上设计要求,模数转换部分选取高精度低噪声的24 bit模数转换器ADS1232,它集成了板上低噪声可编程增益放大器(PGA),包含一个3阶调制器和一个4阶数字滤波器及内部振荡器,满足本设计中对AD转换器的要求。处理器选取STC12C5A60S2器件,存储模块选用ATMLH116 2ECL。控制模块可以实现去皮、分度值、单位等一系列称重系统的设置,根据称重的量程要求,显示部分确定为定做的LED断码屏,其驱动芯片选用HT1621B。图3为目标重量为10 kg时,所设计、制作的称重系统,在实际工作状态下的图见图3。
为了测量所设计称重系统的线性度与灵敏度,实验选取在量程5 kg~50 kg范围内10 kg、15 kg、20 kg、25 kg、30 kg、35 kg、40 kg、45 kg共8组目标重量进行测量标定,可以得到目标重量Gc与称重系统输出电压Vo之间的关系,如图4所示。
从图4中可以看出:随着目标重量Gc的增加,称重系统的输出电压Vo也相应升高,并且输出电压Vo与目标重量Gc之间具有很好的线性对应关系。同时,由图4可以得到:在传感器量程范围内,该称重系统的灵敏度约为0.2 mV/kg。

图3 工作状态下的称重系统图
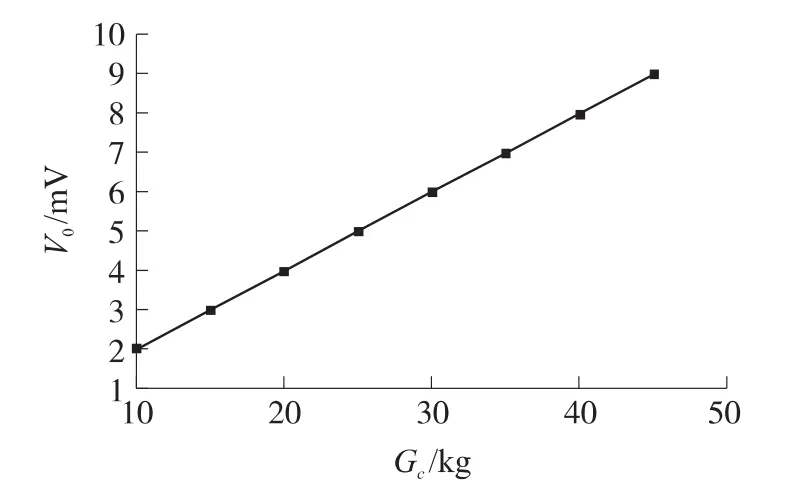
图4 目标重量Gc与输出电压Vo之间的关系
为了进一步验证所设计称重系统的准确性,及使用改进型限幅平均滤波算法对提高系统测量精度方面的作用,分别对使用与未使用改进型限幅平均滤波算法的系统进行了称重测量实验。根据第n组测量值Gn和相应的目标重量Gc,计算出各自的测量误差率Qn为

实验中分别对每组目标重量进行5次称重测量,并取5次测量平均值作为最终测量结果。使用与未使用改进型限幅平均滤波算法的5次平均测量值分别为G2n、G1n,测量误差率分别为Q2n、Q1n。测量数据以及测量误差率如表1所示。
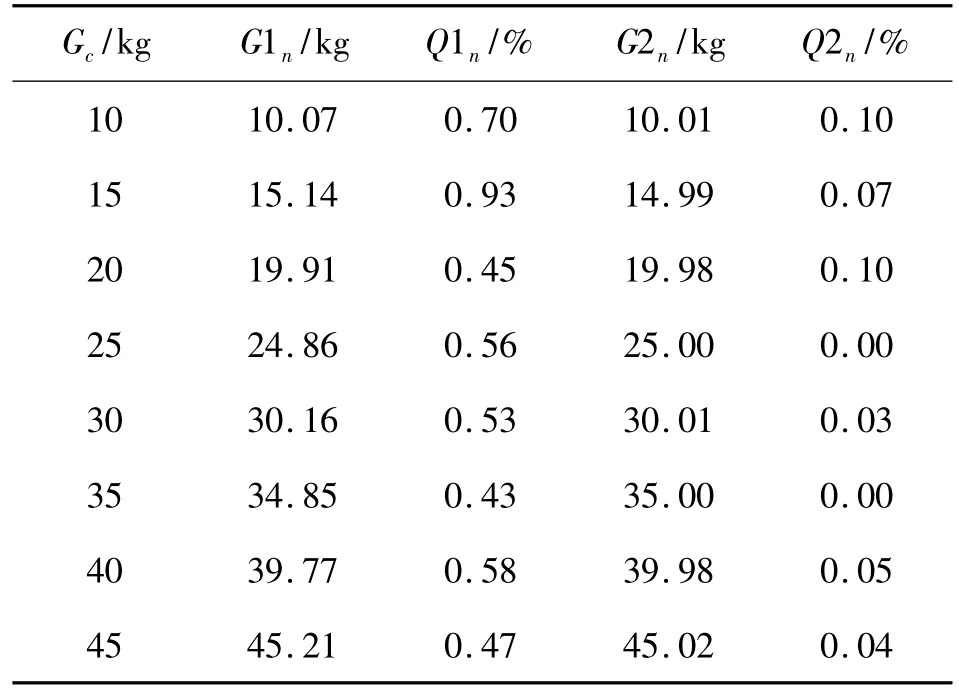
表1 实验测量数据
由称重测量结果可知,未使用改进型限幅平均滤波算法的称重系统,最大测量误差率为0.93%,而使用本设计中的改进型限幅平均滤波处理后,测量误差率维持在0.1%以内。改进算法使系统的测量精度提高了9倍,所测数据更加精确稳定,实现了高精度高稳定性的称重系统设计。
3 结论
本文设计了一种高精度高稳定性的称重测量系统。采用软硬结合的方式对采集信号进行滤波处理,提高了系统测量精度和与抗干扰性。通过实验对比得出,提出的改进型限幅平均滤波算法使整个称重测试系统的精度和稳定性得到了大幅提高,实现了高精度称重系统的设计要求。
[1]Brox D,Mohammadi A R,Takahata K.Non-Lithographically Micro Fabricated Capacitive Pressure Sensor for Biomedical Applications[J].Electronics Letters,2011,47(18):1015-1017.
[2]Pavlin Marko,Novak Franc.Yield Enhancement of Piezoresistive Pressure Sensors for Automotive Applications[J].Sensors and Actuators,A:Physical,2008,141(1):34-42.
[3]Kottapalli A G P,Asadnia M,Miao J M.Polymer MEMS Pressure Sensor Arrays for Fish-Like Underwater Sensing Applications[J]. Micro and Nano Letters,2012,7(12):1189-1192.
[4]Donati George L,Amais Renata S,Nóbrega Joaquim A.Interference Standard:A New Approach to Minimizing Spectral Interferences in Inductively Coupled Plasma Mass Spectrometry[J].Journal of Analytical Atomic Spectrometry,2011,26(9):1827-1832.
[5]刘文静,王民慧,汪亚霖.强磁场下微弱信号检测系统设计[J].传感技术学报,2013,26(6):865-870.
[6]周万幸.一种新型极化抗干扰技术研究[J].电子学报,2009,37(3):454-458.
[7]郜园园,阮晓钢,宋洪军.两轮自平衡机器人惯性传感器滤波问题的研究[J].传感技术学报,2010,23(5):696-700.
[8]Tzvetkov Kostadin,Tarczynski Andrzej.On Digital Filtering of Band-Limited Signals Using Lower Sampling Rates[J].Journal of Computers,2010,5(10):1486-1493.
[9]Hyodo Tatsuki,Asakura Gaku,Tsukada Kiwamu.Performance Improvement of the Analog and Circuit for a Duct by Insertion of an All-Pass Filter[J].IEICE Transactions on Fundamentals of Electronics,Communications and Computer Sciences,2013,E96-A (4):824-825.
[10]LüWenxiang,Zhang Jinzhu,Yang Yue,et al.Parameter Analyses of an Adaptive Amplitude Limit Filtering Method[J].Journal of Tsinghua University,2012,52(8):1106-1111.
[11]Kweon S J,Shin S H,Yoo H J.High-Order Temporal Moving-Average Filter Using a Multi-Transconductance Amplifier[J].Electronics Letters,2012,48(15):961-962.
[12]刘新新,周小佳,闫斌.无线传感器网络中基于能量检测的定位研究[J].传感技术学报,2011,24(6):884-887.
[13]Liu Yuliang,Zhu Jie,Zhan Zhenqiu.Improved Scheme of Internet Congestion Control under Moving Average Filter[J].Journal of Shanghai Jiaotong University(Science),2009,14(6):641-644.

文常保(1976-),男,博士/博士后,副教授。2012年到2013年在美国University of South Florida从事访学研究工作,主要从事真空微纳电子器件、信息处理器件及传感器的研究,estlab@chd.edu.cn;

高丽红(1987-),女,硕士研究生。主要研究方向为传感器及信号处理,gaolihong1020@126.com。
The High-Precision Weighing System Based on the Improved Amplitude-Limiting and Average Filtering Algorithm*
WEN Changbao*,GAO Lihong,FANG Jishan,JU Yongfeng,LI Yanming
(Institute of Micro-Nanoelectronics,School of Electronics and Control Engineering,Chang’an University,Xi’an 710064,China)
In order to reduce the influence of interference signals to the measuring accuracy of weighing system in the data collecting,a high accuracy weighing system based on improved amplitude-limiting and average filtering algorithm was proposed.The weighing system consists of data acquisition,analog-digital converter,processor,storage unit,control module and display module.Being combined limiting filtering,median filtering and moving average filtering,the improved amplitude-limiting and average filtering algorithm eliminates the random pulse and suppresses periodic interference.Based on the experiment of eight different targets ranged from 5 kg to 50 kg,the systems using and without using the improved amplitude-limiting and average filtering algorithm were measured and analyzed.Experimental results show that the maximum error rate of the weighing systems using the improved amplitude-limiting and average filtering algorithm is 0.1%,and the accuracy of weighing system is nine times higher than that of without using this algorithm.
sensor;weighting system;moving average filter;amplitude-limiting filter;data acquisition system; high precision
TP274;TP212.9;TP202
A
1004-1699(2014)05-0649-05
10.3969/j.issn.1004-1699.2014.05.015
项目来源:国家自然科学基金项目(60806043);中央高校基本科研业务费专项资金项目(2013G3322010,2013G1321041)
2013-12-12
2014-04-11
猜你喜欢
一重技术(2021年5期)2022-01-18 05:42:08
系统工程与电子技术(2021年8期)2021-07-27 08:39:18
电气技术(2021年3期)2021-03-26 02:46:08
通信电源技术(2020年22期)2020-03-27 06:48:02
测控技术(2018年4期)2018-11-25 09:47:14
工业设计(2016年6期)2016-04-17 06:42:54
物理化学学报(2015年7期)2015-12-30 12:13:18
电机与控制应用(2015年2期)2015-03-01 03:49:22
海军航空大学学报(2015年4期)2015-02-27 13:45:51
电测与仪表(2014年13期)2014-04-04 12:04:16