一种基于多普勒效应的水下无线传感器网络时间同步机制*
2014-08-29 11:47:58王建平孔德川陈伟河南科技学院信息工程学院河南新乡453003武汉理工大学信息工程学院湖北武汉430070
传感技术学报 2014年5期
王建平,孔德川,陈伟(.河南科技学院信息工程学院,河南新乡453003;2.武汉理工大学信息工程学院,湖北武汉430070)
一种基于多普勒效应的水下无线传感器网络时间同步机制*
王建平1,2,孔德川1,陈伟2*
(1.河南科技学院信息工程学院,河南新乡453003;2.武汉理工大学信息工程学院,湖北武汉430070)
时间同步是无线传感器网络的基础问题。电磁波在水下环境的传输衰损极大,为此水下无线传感器网络通常采用超声波实现信息传输。由于超声波较低的传输速率和传感器节点在水中的运动,必将导致严重的信号传输延迟。构建了一种基于多普勒效应的水下无线传感器网络时间同步机制,通过检测接收到的超声波频率变化来实现时间同步校正。基于MATLAB实现了该同步算法的仿真。实验结果显示,传感器的采样时间间隔越短,移动速度越快,在水中所处的深度越小,整个系统的同步性越高。
多普勒效应;水下无线传感器网络;时间同步;时钟偏移
水下无线传感器网络是由具有声学通信与计算能力的传感器节点构成的水下监测网络系统[1]。随着无线传感器技术的发展,当前水下无线传感器网络的研究已经引起了学术界的高度重视。针对水下无线传感器网络的系统结构、水下定位、水声通信等研究领域已经开展了大量基础研究,并取得了一定的成果,相关小规模的海洋传感器网络已经投入实验运行[2]。水下无线传感器网络部署在海洋等水下环境,在实现水下环境的污染监控,水下生物样本采集,自然灾害预防,辅助导航等方面具备广阔的应用前景[3]。
时间同步是无线传感器网络的基础问题。为实现时间同步,无线传感器网络通常采用GPS实现定位,通过定位来计算传感器之间的距离,从而获知节点间的时差,实现时间的同步校正。然而水下环境复杂,部署网络存在很多的条件限制。传感器节点一方面要考虑防水设计;另一方面,在水下,传感器节点难以接收GPS信号,为此部署定位比较困难。当前水下传感器网络的部署研究层出不穷。李世伟[4]等人提出利用潜艇出现深度信息的先验概率模型,设计了一种基于潜艇深度的部署算法。该方法通过层次之间节点的补充及层次内部节点的休眠,来降低能耗,延长网络生存期。单志龙[5]等人提出了基于相交环的两跳定位算法(IR2H),利用同心环裁剪,缩小未知节点的定位区域,并通过两跳来定位节点。但是该方法存在时延过长等问题。
此外,由于电磁波在海水中传播时,其选择性衰弱非常严重,频率越高衰减越大[6]。而超声波在海洋中的衰减比电磁波小1 000倍[7],因此,目前水下无线传感器网络主要采用波速约为1 500 m/s的超声波进行通信。由于超声波比电磁波的速度(3.0 ×108m/s)慢很多,所以,当水下无线传感器处于运动状态时(例如将传感器部署在鱼或其他水下运动生物体上),必将导致相当大的测量误差,导致时间同步出现问题。
本文给出了一种采用水面浮标和水下运动无线传感器节点构建的水下无线传感器网络通信样例。在这种网络中,传感器节点采用超声波和水面浮标进行通信,实时的将水下环境的实际检测、勘探等结果及时准确的传输到水面浮标。由于节点在水下的不断运动和超声波信号在水中传输的延迟等问题,可能导致检测信息的时间同步出现故障,难于定位节点传来检测结果的实际区域位置等问题。
考虑到水下传感器节点的运动特征,基于这种运动以超声波进行通信可引起多普勒效应的变化特征来构建整个WSN检测网络的时间同步机制,以提高系统的定位准确性和检测的可靠性。
本文构建了一种基于多普勒效应的水下无线传感器网络时间同步机制。设计了一种基于多普勒效应的频率检测方法,传感器只需通过接收浮标发出的声呐频率变化就可以计算其与浮标之间的直线距离。通过该距离计算信号的传输延迟,浮标以此发送同步校正数据包,实现时间同步。
基于MATLAB实现了该同步机制的实验仿真。仿真测试了不同采样时间间隔、不同的水下传感器移动速度和在水中所处深度对整个时间同步错误期望值Et的影响。实验结果显示,采样时间间隔越短,无线传感器的移动速度越快,传感器在水中所处的深度越小,Et的值越小,整个系统的同步性越高。随着时间的延续,在统计不同采样时间间隔和传感器深度的情况下,系统的时间同步错误期望值Et不断增加。而在不同的速度情况下,时间同步错误值Et却逐步减少。
在整个系统数据的分析中,可以看到传感器在水中的所处深度对时间同步的影响最大,而采样时间间隔的影响却相对最小。为此,在实际部署水下无线传感器网络时,如何实现采样时间间隔、传感器的移动速度、传感器在水下所处深度之间的权衡是未来研究的热点问题。
1 基于多普勒效应的时间同步设计
同步算法是指节点之间通过交互同步消息,补偿当前本地时间与绝对时间之间的差值,实现本地时间与绝对时间的一致。已有研究表明,水下无线传感器网络的时间同步可能受到水声传播速度、节点移动性、洋流等相关性的影响[8]。
1.1 研究现状
S.Ganeriwal等人提出了TPSN[9]同步算法,它将无线传感器网络中的所有节点建立一个层次状的树形结构,采用两个层次节点间互相交换的数据报来估计传感器的时钟漂移和时钟偏移,以此来实现时间同步,然而该算法却没有考虑在水下环境如何使用的问题。M.Mar'oti等人提出了FTSP[10]同步算法,该算法将系统时间加入到节点传送的时戳数据报中,采用线性回归的方式,求得参考节点时间与传感器节点的时钟偏移,从而完成同步校正。该算法的缺陷是当参考节点出现时钟漂移时,将导致同步回归过程出现极大的误差。
Syed A等人提出了一种两阶段的同步算法TSHL[11],该算法的第一阶段采用类似FTSP算法的交互方式。第二阶段采用类似TPSN算法的交互方式。TSHL算法假设水下无线传感器节点处于固定状态,而对于水下移动节点则没有进行讨论。Chirdchoo N[12]等人提出了一种基于簇划分的水下无线传感器网络时间同步算法,它适用于水下移动无线传感器节点,通过将整个网络划分为多簇的方式进行管理。每个簇中的簇头节点和其他节点采用类似TPSN的算法进行两次线性拟合来实现同步数据交互。但是,在水下环境中,由于水声信道的时变性和节点的移动性,特别是受洋流影响导致节点快速移动时,往返的传播延迟误差太大,影响了时间同步的精度。
Li Z等人提出了E2DTS[13]同步算法,该算法采用移动自主水下航行器(AUV)作为基准节点,使用两阶段的同步过程来进行时间的同步校正。该算法具备较高的节能特征,但对水下传感器的移动环境考虑不全面,其时间同步的计算复杂度存在问题。Liu J等人提出了Mobi-Sync[14]同步算法,该算法采用一种称为超级节点的时间基准节点来进行时间校正,设计了信息交互延迟估计、线性拟合、校准三个阶段来实现时间同步。然而该算法依赖于超级节点的部署,相关超级节点的部署难度较大。
1.2 多普勒效应
多普勒效应指出,物体辐射的波长由于波源和观测者的相对运动而产生变化,在波源与观察者存在相对运动时,多普勒效应就会产生。假设Fs表示波源发出信号的频率,λ表示波长,Vw表示波速,波源与观察者在同一水平线上进行相对运动,Vo表示观察者移动的速度,Vs表示波源的移动速度,Vw、Vo、Vs具备方向性。多普勒效应通常存在观察者静止、波源静止和观察者与波源相对运动三种情况。
第一种情况下,当波源接近观察者,而观察者静止时,波源认为其接近观察者端的波速是Vw-Vs,故其波长,=但观察者认定的波速是原本波源的Vw,而检测到的波长同样是λ',所以观察者得到的频率代入,可求得F如式(1)所示:

第二种情况下,波源静止,观察者向波源接近。此时观察者认为波源的波速是Vw-Vo,而波长仍然是λ,所以观察者观察到的频率

1.3 基于多普勒效应的距离估算
假设将无线传感器安装在水下生物体上,每个传感器都有不同的速度、方向和位置信息。在水面上放置多个固定位置的浮标,浮标持续发出同样频率的超声波,浮标和水下无线传感器之间采用超声波进行通信。无线传感器通过接收到的超声波频率变化来计算自己当前相对于浮标的移动速度及距离。最后,所有无线传感器根据距离估计的结果,来完成与浮标时间的同步校正。浮标都带有GPS模

第三种情况下,当观察者与波源互相接近时,可由式(1)、式(2)求得F,如式(3)所示:代入,可求得F如式(2)所示:块,可采用GPS定位,浮标之间可采用电磁波进行通信,实现浮标之间的时间同步,通过这种方式来完成整个系统的所有水下传感器节点的时间同步。在本文研究中仅假设指定一个浮标,多个传感器均处于和一个浮标通信的范围内。
假设无线传感器在检测开始时与浮标的水平距离为d,且位于水面下深度为h的位置,并以匀速Vo由左向右水平移动。由于无线传感器与浮标之间存在相对运动,所以其接收到浮标的频率Fs会受到多普勒效应的影响。随着移动位置的变化Fs会有不同的频率改变。无线传感器向浮标方向移动时,符合多普勒效应中声源不动,观察者移动的情况。由于观察者认为的波速,将较声源实际发送的波速大,在波长不变的情形下,其所接收到的频率F(t)与传感器和浮标之间连线的水平夹角θ有关,如图1所示。
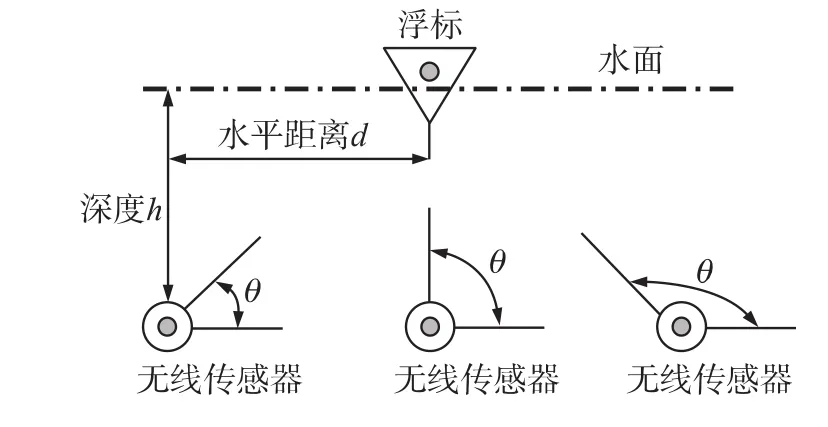
图1 无线传感器位置与θ关系图

由式(4)可知,无线传感器测得的频率与夹角的cosθ(t)值有关。理论上,当无线传感器位于浮标前方无限远处时,认为夹角θ=0,则cosθ(t)将趋近于1。此时,观察者实际测得的最大频率Fmax如式(5)所示:
因此可推导观察者实际测得的频率F(t),如式(4)所示:
当无线传感器到达浮标正下方时θ=π/2,则cosθ(t)=0,在此瞬间,测得的频率将等于原始频率Fs。当无线传感器位于浮标后方无限远处时θ=π,cosθ(t)将趋近于-1。此时,观察者实际测得的最小频率Fmin如式(6)所示:

将测得频率最接近Fs的检测时刻定义为T0,可以看到,在T0时刻无线传感器到达浮标的正下方,我们采集T0时刻后Tt秒内的所有频率值,如图2所示。

图2 采集频率起始位置图
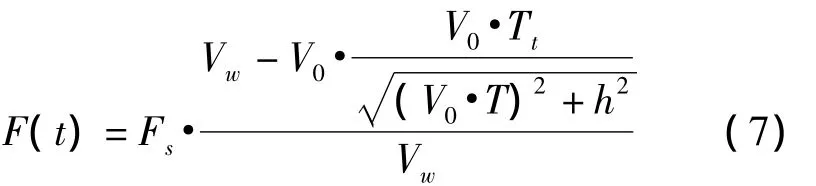
要求采集的频率F(t)的平均值与最小频率Fmin的差距必须小于自行定义的阀值Fσ,即满足不等式(8):

由式(6)、(7)、(8)可解出Tt的范围如不等式(9)所示:
此时检测到的频率F(t)如式(7)所示:
找出Tt的最小值后,筛选出在这个时间点之后具参考意义的检测数据,以求出最接近最小频率Fmin的值¯Fmin,假设共有n笔数据被筛选出来,¯Fmin定义如式(10)所示:


当t=0时,无线传感器位于浮标前d的位置,而当t=T0时,刚好经过与浮标超声波信号的正交区域,这段期间,无线传感器以Vo的速度匀速移动。假设最接近Vo的速度是~Vo,则可估计最接近d的距离~d可用式(12)表示:

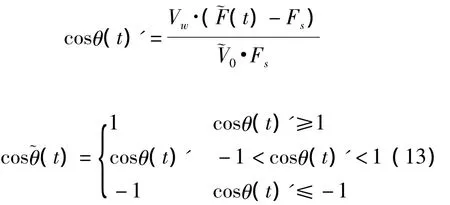
将~Vo及所有的频率检测数据代入式(4),可以将所有检测点的cosθ(t)值计算出来,这些计算出来的cosθ(t)值用cosθ'(t)来定义。由于存在检测误差,会导致转换出来的cosθ'(t)值会存在不在区间[-1,1]的情况,为此定义将cosθ'(t)中大于1的值用1来表示,小于-1以下的部分用-1表示,cos~θ (t)的定义如式(13)所示:
可由式(6)估计最接近V0的速率~Vo,如式(11)所示:
根据三角函数的定义,将cosθ'(t)转换为tan~θ(t),如式(14)所示:

在每个检测点测量的tanθ(t)与无线传感器所处的深度h存在如式(15)所示的关系:

将式(16)代入式(19)中的d,可得式(16)


从式(17)得知tan~θ(x)与x呈线性相关,在去除无意义的t=T0点后,将式(16)求出的tan~θ(t)代入,可用线性回归的方法求出系数h/~V0,其中Vo的估计值~Vo已求得,所以可以解出深度h,深度求出后即可计算传感器与浮标之间的直线距离。
完成距离估算之后,可以采用多普列效应来计算时延,通过时延估算就可以进行时间同步的处理过程。在整个系统中,可能受到实际传感器节点故障和水下环境的影响,导致部分传感器节点计算的距离出错,为此,需要设计一种滤波机制,实现滤波处理过程。本文的滤波过程基于常见的扩展卡尔曼滤波器方法进行。通过在一个时间段内的节点估计距离和预测结果的对比分析来进行滤波处理。
1.4 基于多普勒效应的时间同步
完成滤波处理后,就可以进行整个节点的时间同步过程。假设构建的水下无线传感器网络中采用同一型号的传感器,将其时钟漂移忽略不计,而只考虑传感器间的时钟偏移,通过偏移校正来实现传感器的时间同步。假设每个时刻,无线传感器与浮标之间都可形成如图3所示的相对位置。当传感器收到浮标发送的同步数据包后,它会先将浮标发送超声波的起始时间Tb记录下来,同时记录传感器本身的系统时间Ts,然后选用上面提出的方法来求得每个无线传感器相对于浮标的Vo、d及h。,所以式(16)可用式(17)表示
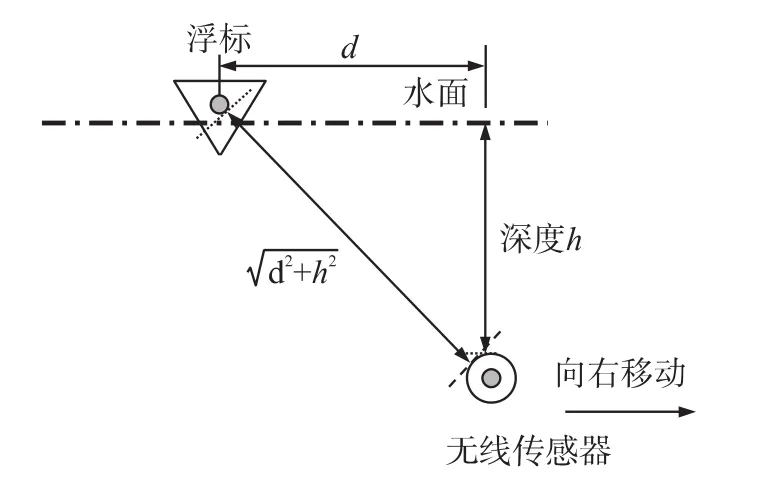
图3 浮标传输延迟示意图

由于无线传感器持续移动,在不同的时间点,传输延迟将会改变。当求得Td后,可以找出浮标与无线传感器的时间关系。如图4所示,浮标发出持续声波的系统时间为Tb,然后经过传输延迟Td的时间,才让无线传感器接收到。而无线传感器接收到浮标发出的持续声波的系统时间为Ts。
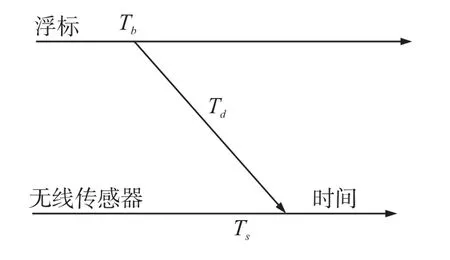
图4 浮标与无线传感器的时间关系图

因此,可以求出浮标与无线传感器间的时钟偏移如式(19)所示所以,只要将无线传感器当前的系统时间加上ΔT后,即完成与浮标的时间同步工作。当水面下所有的无线传感器都分别与浮标时间同步后,即可实现整个无线传感器网络的时间同步。
2 仿真分析
我们基于MATLAB来实现该时间同步机制的仿真过程。相关的仿真参数如表1所示。

表1 仿真参数

其中,¯ti为第i次仿真过程中,无线传感器时间同步的估计值。在实验中,不考虑浮标封包发送与接收的时间差,并且不考虑浮标与无线传感器间的时钟漂移,而仅仅关注Tb和Ts对ΔT的影响。
2.1 采样时间间隔实验
在进行时间同步过程中,如果采样频率越高,时间同步的精确度越强。为探讨无线传感器在固定的检测时间内,采样的时间间隔对时间同步正确性的影响,假设传感器刚好从浮标的正下方通过,并匀速向右移动,其移动速度Vo设定为5 m/s,初始位置与浮标的距离d设定为150 m,无线传感器的实际深度h设定为水下100 m,并且水平运动。
我们分别采用时间间隔1 s,2 s和3 s三种方式来进行测试,设定的测试总时间为600 s,采用30 s为一个测量基本单元。即分别的采样时间频率为30,15和10。则采用本文提出的方法统计的时间同步错误率Et的对比结果如图5所示。
仿真测试了不同采样时间间隔、不同的无线传感器移动速度和无线传感器在水中的所处不同深度对整个时间同步错误期望值Et的影响,Et的定义如式(20)所示:

图5 不同采样时间间隔对同步错误率的影响
测试数据看到,当采样时间持续30 s时,采样间隔为30 s的时间同步错误期望值为2.307,采样间隔为15 s的时间同步错误期望值为1.504,采样间隔为10 s的时间同步错误期望值为1.204,当采样时间持续到600 s时,三种采样间隔的时间同步错误期望值分别为3.637,2.348和1.507。计算得知,采样间隔30 s的错误期望值增加了57.65%,采样间隔15 s的错误期望值增加了56.11%,采样间隔10 s的错误期望值增加了25.16%。从实验结果分析可得,采样间隔差距越小,其同步错误期望值变化程度越低,其时间同步的错误率越低。
2.2 无线传感器速度实验
为了探讨无线传感器在水下不同的移动速度,对时间同步正确性的影响,设定无线传感器的初始位置与浮标的距离d设定为150 m,实际深度h设定为水下123 m,我们给出了1 m/s、5 m/s、10 m/s三种匀速移动速度。假设传感器刚好从浮标超声波信号正交区域位置的正下方通过向右移动,采样的时间间隔为30 s,在总测量600 s的时间内,让无线传感器接收相关的采样值,则采用本文提出的方法统计的时间同步错误率Et的对比结果如图6所示。

图6 不同移动速度对同步错误率的影响
由实验结果可以发现,无线传感器的速度越快,随着无线传感器的速度提高,由于多普勒效应明显增加,d及h的估计都比较精确,使得同步时间的错误率明显降低。由此可知在整个浮标和无线传感器的通信范围内,当无线传感器通过浮标正下方向右移动时,其起初的同步误差值相对较大,当达到一定时间范围后,同步的准确率会逐渐提升。
2.3 无线传感器深度实验
为了探讨无线传感器位于不同范围的深度h下,对时间同步正确性的影响,假设无线传感器处于水中的深度h的取值分别为150 m,350 m,550 m,将V0设定为5 m/s,初始位置与浮标的距离d设定为150 m,检测时间为600 s,测得不同深度范围对Et的影响如图7所示。

图7 无线传感器深度h与Et关系图
由实验结果可以发现,在相同的系统环境下,当无线传感器的深度增加,使得无线传感器及浮标连线与水平线夹角逐渐减小,由多普勒效应可知,这将导致检测频率减少,让非线性拟合的困难度增加,导致距离估计d及h的错误率,将造成时间同步的误差大幅增加。
3 结论与展望
在水下无线传感器网络中,很难采用电磁波来进行节点之间的通信,为此通常采用超声波来实现通信。由于超声波的速度比电磁波的速度慢的多,因此当无线传感器处于运动状态时,必将导致相当大的测量误差。
我们设计了一种基于多普勒效应的水下无线传感器网络同步机制。提出了一种基于多普勒效应的频率检测方法,无线传感器只需通过接收浮标发出的持续超声波就可以估计其与浮标之间的直线距离。通过采用线性回归的方式,来估算移动无线传感器相对于浮标的深度h、水平距离d和速度V0,依此计算出无线传感器与浮标间的直线距离和传输延迟时间,来实现整个无线传感器网络的时间同步。
通过MATLAB仿真测试了不同采样时间间隔、不同的无线传感器移动速度和不同的无线传感器在水中的所处深度对整个时间同步错误期望值Et的影响。实验结果显示,采样时间间隔越短,无线传感器的移动速度越快,传感器在水中的深度越小,Et的值越小,整个系统的同步性越高。在统计不同采样时间间隔和传感器深度的情况下,随着时间的延续,系统的时间同步错误期望值均在不断增加。而在不同的速度情况下,随着时间的延续,时间同步错误值却在减少。
在整个系统数据的分析中,可以看到传感器在水中的所处深度对时间同步的影响最大,而采样时间间隔的影响却相对最小。为此,在实际部署水下无线传感器网络时,如何实现采样时间间隔、传感器的移动速度、传感器在水下的所处深度之间的权衡是未来研究的热点问题。
同时,在实际中由于考虑到无线传感器的节能问题,如果采样时间间隔越小,则采样频率越高,其耗能也越大。此外,无线传感器在水下的移动受到洋流的影响较大,如果无线传感器是逆流运动,则速度越快,耗能就越多,为此节能成为该同步机制需要考虑的一个问题。
本文仅假设浮标静止,而传感器节点运动,其运动相对速度为0(相对静止)的持续时间相对非常短暂。文章仅探讨了运动速度对同步的影响,对于水面浮标相对于传感器节点同时运动的模式没有涉及。当前我们正在完成设计一个“洋流水场”模型来尝试解决传感器节点与浮标相对都处于运动或者静止状况下的新问题。
[1]夏娜,郑语晨,杜华争,等.刚性驱动水下传感器节点自组织布置[J].计算机学报,2013,36(3):494-505.
[2]郭忠文,罗汉江.水下无线传感器网络的研究进展[J].计算机研究与发展,2010,47(3):377-389.
[3]Akyitdiz F,Pompiti D,Melodia T.Underwater Acoustic Sensor Networks:Research Challenges[J].Ad Hoc Networks,2005,3(3):257 -279.
[4]李世伟,王文敬,张聚伟.基于潜艇深度的水下传感器网络部署[J].传感技术学报,2012,25(11):1613-1617.
[5]单志龙,胡燕.基于相交环的水下无线传感器网络节点自定位研究[J].传感技术学报,2012,25(4):536-540.
[6]魏志强,杨光,丛艳平.水下无线传感器网络安全研究[J].计算机学报,2012,35(8):1594-1606.
[7]Cui Junhong,Kong Jiejun,Gerla,et al.Challenges:Building Scalable and Distributed Underwater Wireless Sensor Networks (UWSNs)for Aquatic Applications[J].IEEE Network,Special Issue on Wireless Sensor Networking,2006,20,12-18.
[8]洪锋,张玉亮,杨博真,等.水下无线传感器网络时间同步技术综述[J].电子学报,2013,41(5):960-965.
[9]Ganeriwal S,Kumar R,Srivastava M.Timing-Sync Protocol for Sensor Networks[C].Proceedings of the 1st International Con-ference on Embedded Networked Sensor Systems,2003:138-149.
[10]Mar'oti M,Kusy B,Simon G,et al.The Flooding Time Synchronization Protocol[C].Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems,2004:39-49.
[11]Syed A,Heidemann J.Time Synchronization for High Latency A-coustic Networks[C].Proceedings ofthe 25th IEEE Conference on Computer Communications,2006:1-12.
[12]Chirdchoo N,Soh W,Chua KC.MU-Sync:a Time Synchronization Protocol for Underwater Mobile Networks[C].Proceedings of the First ACM international Workshop on Underwater Networks,2008: 35-42.
[13]LI Zhengbao,GUO Zhongwen,HONG Feng,etal.E2DTS:an Energy Efficiency Distributed Time Synchronization Algorithm for Underwater Acoustic Mobile Sensor Networks[J].Ad Hoc Networks,2013,11(4):1372-1380.
[14]Liu J,Zhou Z,Peng Z,et al.Sync:Efficient Time Synchronization for Mobile Underwater Sensor Networks[C].Proceedings of IEEE Global Telecommunications Conference,2010:1-5.

王建平(1981-),男,博士生,讲师。主要研究方向为水下无线传感器网络、认知无线电技术,xunji2002@163.com;

孔德川(1977-),男,硕士,讲师,主要研究方向无线传感器网络、嵌入式系统设计,kongdechuan@gmail.com;

陈伟(1963-),男,教授,博士生导师。主要研究卫星导航系统理论与技术应用,宽带无线通信与认知无线电技术。主持或参与国家863计划项目,国家自然科学基金项目,交通部“十一五”交通发展重大研究课题项目等多项,greatchen@whut.edu.cn。
Design of a Time Synchronization Mechanism Based on Doppler Effect for Underwater Wireless Sensor Networks*
WANG Jianping1,2,KONG Dechuan1,CHEN Wei2*
(1.School of Information Engineer,Henan Institute of Science and Technology,Henan,Xinxiang,453003,China; 2.School of Information Engineer,Wuhan University of Technology,Hubei,Wuhan,430070,China)
Time synchronization is the fundamental problem of wireless sensor networks(WSN).Transmission fading ofradio in underwater environmentis extremely large,so itoften uses ultrasound to transmitdata in underwater wireless sensor networks(UWSNs).Due to the low transmission rate ofultrasound and moving ofthe sensor nodes in underwater environment,it will lead to serious signal transmission delay.In this paper,we design a time synchronization mechanism based on Doppler Effect for UWSNs.It can achieve time synchronization correction by detecting the received ultrasonic frequency variation.We testthe performance ofthe synchronization mechanism by MATLAB.The experimental results show that,if the sampling time interval is shorter,the moving speed is faster and the depth of sensors in the water is smaller,the synchronicity will be higher.
eoppler effect;underwater wireless sensor networks;time synchronization;clock offset
TP393
A
1004-1699(2014)05-0680-07
10.3969/j.issn.1004-1699.2014.05.021
项目来源:国家自然科学基金项目(31371525);河南省教育厅科学技术研究重点项目(14A520067);河南省信息技术教育研究重点项目(ITE12037);河南省教育厅人文社会科学研究项目(2014-gh-245);2014年度河南科技学院教育教学改革研究重点项目(8)
2013-12-26
2014-04-28
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
无线互联科技(2021年4期)2021-04-21 10:12:36
数学小灵通(1-2年级)(2020年11期)2020-12-28 00:41:14
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:44
小猕猴智力画刊(2019年3期)2019-04-19 00:01:52
电子制作(2018年23期)2018-12-26 01:01:08
电子制作(2016年15期)2017-01-15 13:39:03