
无磁链反馈无刷直流电机控制研究
2014-08-25 02:18谢卫彬孙会琴
河北工业科技 2014年4期
李 占,李 斌,谢卫彬,孙会琴
(河北科技大学电气工程学院,河北石家庄 050018)
无磁链反馈无刷直流电机控制研究
李 占,李 斌,谢卫彬,孙会琴
(河北科技大学电气工程学院,河北石家庄 050018)
基于直接转矩控制的无磁链反馈,提出一种无刷直流电机控制方法,该方法运用转速和转矩滞环的逻辑信号来驱动空间电压矢量,既起到直接控制电机转矩作用,又削弱了转矩脉动;这种方法消除了复杂的磁链环节,SIMULINK和实验结果表明,该系统实现了设计要求。
直接转矩控制;无磁链反馈;空间电压矢量
随着永磁材料、功率器件和智能理论的深度研究,无刷直流电机和其控制研究也有了更大的进步,并被广泛应用于电动三轮车、四轮汽车等日常生活中,实现了各个运动量的控制[1]。
在绕组换相时,产生的转矩脉动是个缺陷,不仅会使得电机在控制系统中受到影响,还会引起速度特性方面的缺陷,因而提高电机驱动性能的关键就是抑制或削弱转矩波动。
本文介绍的控制方法中,除去磁链环节,直接进行电磁转矩操作,针对BLDCM数学模型,计算转矩的坐标观测,通过模型实现建立电机控制模拟,对比不同控制方法的运行结果,并使用测功机对所研究电机做了空载和负载的设计运行实验。
1 BLDCM的数学模型
分析一个三相永磁无刷直流电机,各相绕组在空间互相间隔120°电角度,在这种结构上,作出以下设定:电机气隙磁导均匀,磁路不饱和,忽略电枢绕组间互感以及定子绕组电枢的影响[2]。
考虑到iA+iB+iC=0, 则电机状态方程如下:
(1)
式中:U为定子相电压;R为相绕组电阻;i为定子相电流;L为定子间自感;M为定子间互感;e为定子反电动势。
图1为BLDCM等效的原理图。

图1 BLDCM等效原理图Fig.1 Equivalence schematic diagram of BLDCM
2 BLDCM的电磁转矩分析
在大多数情形下,为了使无刷直流电机的控制实现比较容易,并考虑到在硬件方面有所简化,电磁转矩的计算方法可表示为
Te=(eAiA+eBiB+eCiC)/Ω。
(2)
观察式(2),可以计算得到电流i和转速Ω,只是反电动势e一般不能直接取得,由式(1)可得:
(3)
由式(3)可以实际测量出三相定子相电压U和相电流i,那么电机的电磁转矩可以综合式(2)和式(3)进行推导,进一步深化分析电机转矩观测。
3 BLDCM的空间电压矢量
电机设计采用全桥逆变电路,导通为120°,在逆变电路中,同一个桥臂的上下2个功率开关器件的开关状态互补,即上通下断或上断下通,这样,在逆变电路的6个功率开关器件的基极上可以形成几组不同的开关信号[3]。电压空间矢量被表示成6位的二进制数,其中6个非零电压空间矢量V1,V2,V3,V4,V5,V6分别为(100001),(001001),(011000),(010010),(000110),(100100),而零电压空间矢量V0(000000)代表绕组定子端电压为零,即所有功率管呈闭合状态。在图2中,按照V1→V2→V3→V4→V5→V6的顺序,6个基本非零空间电压矢量空间上互差60°,将整个平面等分为6个区域相同的区间。
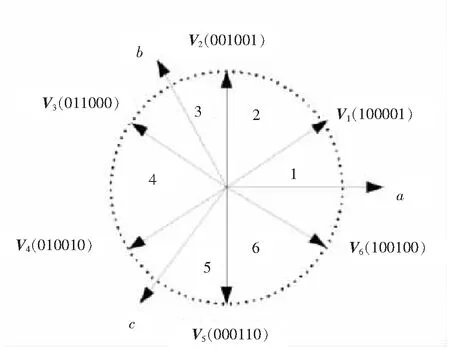
图2 6个非零电压空间矢量分区Fig.2 Six non-zero voltage space vectors
这样,欲使电机旋转的话,控制器将根据转速和转矩的反馈信号,使逆变器反复施加相邻的2个空间电压矢量到三相电枢绕组上,并不断调控它们的施加时间,即达到了控制要求[4]。
4 BLDCM的直接转矩控制
在实际使用中,无刷电机的电磁转矩可由滞环来实现,根据转矩滞环的输出结果D以及Hall位置传感器检测出的开关信号所确定的扇区S来安排对应的空间电压矢量,则开关表如表1所示。

表1 DTC开关表
把电磁转矩给定值与反馈值进行比较,若估计值小于反馈值,则由滞环控制器得到差值D=1,那么电磁转矩需要增大,此时选择非零电压矢量;当D=0时,电磁转矩应该减小,则施加零电压矢量,电磁转矩变小,开关表的设置直接影响着控制系统的性能,这是无刷直流电机转矩控制中最为关键的部分[5]。
5 BLDCM直接转矩控制基本结构
经典直接转矩控制包括2方面,首先在滞环环节中,分别把磁链幅值和转矩的参考值与输出值的误差作对比分析,然后由滞环环节得到的输出值和当前磁链位置信息来选择相应的空间电压矢量,综上即对电机转矩实现了直接控制。经典直接转矩控制如图3所示。

图3 DTC实现框图Fig.3 Block diagram of direct torque control
虽然经典直接转矩控制可以实现电机的正常运行,但是这部分功能需要借助转矩与磁链的滞环过程共同实现,又由于死区时间的存在会对磁链造成阻碍,导致定子磁通振幅会有波动变化,给磁链反馈的观测带来很多麻烦[6]。
因此,就有了霍尔传感器存在的意义,即忽略定子磁链观测,使用霍尔传感器检测出转子开关信号,再来确定空间电压矢量,即本文分析的省去磁链的DTC方法,它不含传统DTC中的磁链滞环环节,而是通过转速和转矩滞环来决定转矩,以获得波动较小的转矩[7],其原理图如图4所示。

图4 无磁链反馈DTC原理图Fig.4 DTC schematics of no-flux feedback
图4中:ng和n分别为参考转速和输出转速;Tg和Te分别为参考转矩和反馈转矩。
6 DTC的仿真模型建立
本文所述控制方法包括电机本体实现、位置检测实现和逻辑换相实现[8]。
6.1电机本体实现
如图5所示,基于无刷直流电机的本体数学模型,绘制模块SIMULINK,这个模拟在整个仿真模型中是最关键的模块。
6.2位置检测实现
无刷直流电动机的转子磁极位置检测,即把信号传输到逻辑开关电路,然后用来控制定子绕组换相。位置检测实现如图6所示。
6.3逻辑换相实现
逻辑换相即实现位置检测信号的预处理,以所得的信号去驱动相应的MOSFET,按顺序通电到电枢绕组上,因此产生了使绕组定子和转子位置空间的垂直磁场,引起转子运行,确保在正常状态下使用电机[9],如图7所示。

图5 电机本体实现Fig.5 Motor body module

图6 转子位置检测实现Fig.6 Rotor position detection module
7 仿真和实验结果
在SIMULINK环境下,基于DTC基本理论,针对无刷直流电机对上述封装模块进行模拟。
电机相关参数如表2所示。

表2 电机参数
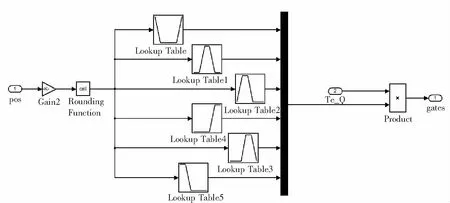
图7 逻辑换相实现Fig.7 Commutation logic module
在搭建的模型中设置上述参数,空载启动电机,然后在0.5 s时设置负载为4 N·m,分析结果,并将经典控制技术与模拟DTC方法进行比较,如图8所示,由此得到速度和转矩响应波形。

图8 仿真实现结果Fig.8 Simulation results
突然给定电机一个负载时,转速发生急剧变化,同时突变的还有电磁转矩。由图8 a)和图8 b)可知,系统在很短的时间内就进入了稳态,当负载突变时,转速有轻微的变动,系统对负载的扰动有较好的抗干扰特性。系统的转矩波形在电机启动时,有较大峰值,在电机平稳运转后,转矩快速恢复到稳定状态,转矩脉动较小,当突加负载时,转矩又迅速调整到稳定状态,而且整体波动范围较小[10]。
在SIMULINK仿真的同时,针对所研究电机进行测功机加载实验,如图9所示,并使用示波器测量出实际响应波形。电机的负载实验结果如图10所示。

图9 测功机实验Fig.9 Dynamometer experiment
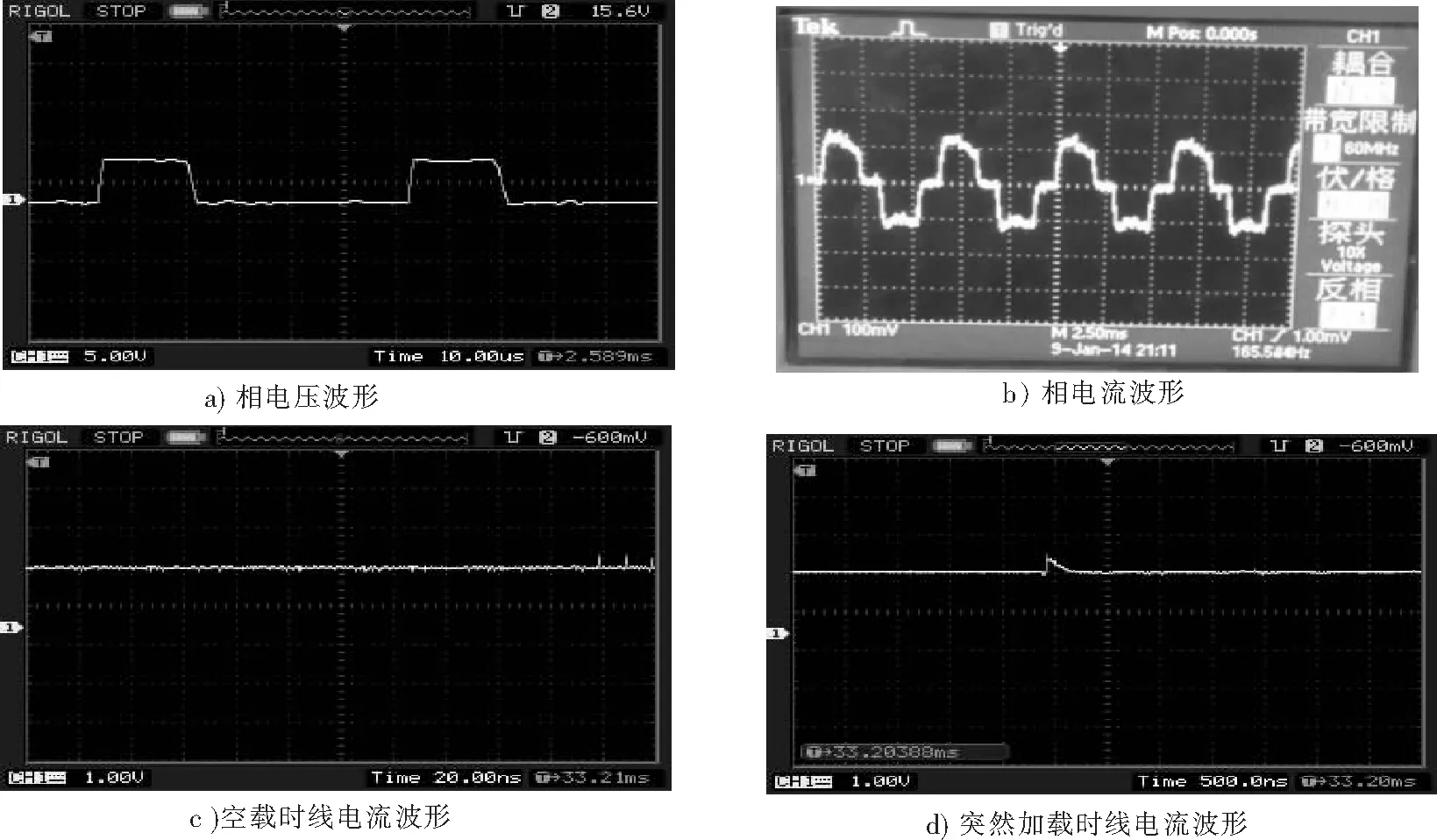
图10 实验结果Fig.10 Experimental results
由图10可知,电机相电压波形趋近于梯形波,相电流波形虽然有点毛刺,但是符合电机控制系统的预想波形。而线电流的图像在电动机空载时接近于一条直线,但是在突加负载的时候会引起电流增加,符合能量守恒定律,表明电机有很好的运行特性。
8 结 语
本文根据课题组设计研制的一台12/8极,1 kW功率的三相BLDCM进行控制系统设计。提出的设计方案简化了滞环控制方式,直接利用转速和转矩滞环调节来对电压空间矢量直接调配,使转矩跳跃限制在一定区域内。总之,根据SIMULINK和电机加载实验结果基本验证了控制系统有很好的实用运行特性,削弱了转矩脉动的影响,达到了设计的要求。
/
[1] 李广伟.无刷直流电机的直接转矩控制研究[D].太原:太原科技大学,2009. LI Guangwei. Direct Torque Control of Brushless DC Motor[D]. Taiyuan: Taiyuan University of Technology, 2009.
[2] TAE-SUNG K, SUNG-CHAN A, DONG-SEOK H. A new current control algorithm for torque ripple reduction of BLDC motors[A].The 27th Annual Conference of the IEEE[C].Beijing: Industrial Electronics Society, 2001.1521-1526.
[3] 尹中良.无刷直流电机的直接转矩控制[D].镇江:江苏大学,2008. YIN Zhongliang. Direct Torque Control of Brushless DC Motor[D]. Zhenjiang: Jiangsu University, 2008.
[4] LIU Yong, ZHU Z Q, HOWE D. Direct torque control of brushless DC drives with reduced torque ripple[J]. Industry Applications, 2005, 41(2): 599-608.
[5] 夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009. XIA Changliang. Brushless DC Motor Control System[M]. Beijing: Science Press, 2009.
[6] 周 托.无位置传感器无刷直流电机控制系统的设计与研究[D].西安:西北工业大学,2006. ZHOU Tuo. Design and Research of Sensorless Brushless DC Motor Control System[D]. Xi′an: Northwestern Polytechnical University, 2006.
[7] 徐 冉.无刷直流电动机直接自控制系统的研究[D].石家庄:河北科技大学,2010. XU Ran. Research on the Strategy of the Direct Self Control of Brushless DC Motor[D]. Shijiazhuang:Hebei University of Science and Technology, 2010.
[8] SONG J G, CHEN Q S. Research of electric vehicle IM controller based on space vector modulation direct torque control[A]. Electrical Machines and Systems[C]. Tokyo:[s.n.],2005.1617-1620.
[9] 鲁文其,胡育文,黄文新,等.无刷直流电机无位置传感器转子位置自检测复合方法[J].电工技术学报,2008,23(9):70-75. LU Wenqi, HU Yuwen, HUANG Wenxin,et al. A hybird approach of sensorless rotor position self-sensing for brushless DC motor[J].Transactions of China Electrical Technical Society,2008,23(9):70-75.
[10] 刘东辉,赵新伟,李天宝,等.无位置传感器无刷直流电机数控调速器设计[J].河北科技大学学报,2013, 34(4):302-307. LIU Donghui, ZHAO Xinwei, LI Tianbao, et al. Design of digital controller for sensorless brushless DC motor speed regulation[J]. Journal of Hebei University of Science and Technology, 2013, 34(4): 302-307.
Study of brushless DC motor control without flux-linkage feedback
LI Zhan, LI Bin, XIE Weibin, SUN Huiqin
(School of Electrical Engineering, Hebei University of Science and Technology, Shijiazhuang Hebei 050018, China)
A brushless DC motor control method is proposed, which is based on the non-flux linkage feedback of direct torque control. The logic signals obtained from hysteresis design of speed and torque are used to allocate the appropriate voltage space vector, which not only control directly torque role, but also suppress torque ripple. The method eliminates the complex magnetic chain links. SIMULINK and experimental results show that the system meets the design requirements.
direct torque control; non-flux linkage; voltage space vector
1008-1534(2014)04-0296-06
2014-03-10;
2014-04-08;责任编辑:陈书欣
河北省科技厅软科学计划项目(13455204D)
李 占 (1988-), 男,河北邢台人,硕士研究生,主要从事运动控制及应用方面的研究。
李 斌教授。E-mail:335371390@qq.com
TM351
A
10.7535/hbgykj.2014yx04006
李 占,李 斌,谢卫彬,等.无磁链反馈无刷直流电机控制研究[J].河北工业科技,2014,31(4):296-301.
LI Zhan, LI Bin, XIE Weibin, et al.Study of brushless DC motor control without flux-linkage feedback[J].Hebei Journal of Industrial Science and Technology,2014,31(4):296-301.
猜你喜欢
大电机技术(2022年5期)2022-11-17
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年2期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
云南电力技术(2015年2期)2015-08-23
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
电测与仪表(2014年23期)2014-04-04
