一种顾及卫星几何分布的GPS/北斗组合定位定权方法
2014-08-25 01:19蔡昌盛戴吾蛟朱建军
测绘工程 2014年12期
潘 林,蔡昌盛,戴吾蛟,朱建军
(中南大学 地球科学与信息物理学院,湖南 长沙 410083)
一种顾及卫星几何分布的GPS/北斗组合定位定权方法
潘 林,蔡昌盛,戴吾蛟,朱建军
(中南大学 地球科学与信息物理学院,湖南 长沙 410083)
在GPS/北斗组合单点定位中,观测值定权通常采用两种方法:一种是先验定权,即利用两卫星系统观测值的先验方差来定权;另一种是验后定权,如Helmert方差分量估计。先验定权方法简单,但不精确;验后定权方法严密,但需要足够多的多余观测。由于位置精度因子(PDOP)能很好地反映卫星的几何分布状况,文中提出一种考虑PDOP信息的观测值定权方法,即在先验定权的基础上,进一步考虑了观测卫星空间几何分布情况。利用开阔环境和遮挡环境下的静态观测数据和动态观测数据进行分析。结果表明:在开阔环境下,考虑PDOP信息定权方法的定位精度和验后定权方法相差不大,并且二者均优于先验定权方法;在遮挡环境下,考虑PDOP信息定权方法的定位精度优于先验定权和验后定权方法。
GPS;北斗;单点定位;定权;位置精度因子
2012年12月27日北斗区域卫星导航系统开始组网运行,面向我国及周边地区提供定位精度10 m、测速精度0.2 m/s、授时精度10 ns的开放服务。当前北斗区域卫星导航系统由14颗卫星构成,包括5颗地球静止轨道(GEO)卫星、5颗倾斜地球同步轨道(IGSO)卫星和4颗中圆地球轨道(MEO)卫星。预计到2020年左右,建成覆盖全球的北斗卫星导航系统,完整星座由5颗GEO卫星、3颗IGSO卫星和27颗MEO卫星组成。
相比单系统,双系统、多系统组合具有明显的优势,可以大大增加可视卫星数,改善卫星几何结构,提高定位的精度、可靠性和效率[1]。在未来多GNSS系统共存的格局下,进行双系统、多系统组合已经成为卫星导航和定位应用发展的一个必然趋势。
在GPS/北斗组合单点定位中,涉及到两个不同卫星系统的观测值,因此需要确定这两个卫星系统观测值的合理权比。目前,主要有两种方法来获得这一权比。一种是先验定权,即得到两卫星系统观测值的先验方差[2];另一种是验后定权,如Helmert方差分量估计[3]。在单点定位中,定位精度主要受两方面影响,一是测距精度,二是观测卫星的空间几何分布。先验定权方法简单,但只考虑了测距精度的影响,并没有考虑观测卫星空间几何分布的影响;验后定权方法严密,但需要较长的时间完成迭代计算,并且需要足够多的多余观测,否则可能出现发散现象。位置精度因子(PDOP)可以衡量观测卫星空间几何分布状况。基于此,提出了一种考虑PDOP信息的观测值定权方法,即在先验定权的基础上,考虑了观测卫星空间几何分布的影响。利用开阔环境和遮挡环境下的静态观测数据和动态观测数据,对考虑PDOP信息定权方法的可行性进行了分析,并与先验定权方法和验后定权方法的结果进行了对比。
1 GPS/北斗组合单点定位定权方法
对于GPS/北斗单频伪距组合单点定位,其基本观测方程可以表示如下[2]:
(1)
(2)
式中:g和b分别表示一颗GPS卫星和一颗北斗卫星;P为卫星第一个频率上的伪距观测值,m;ρ为卫星与接收机之间的几何距离,m;c为光速,m/s;dt为接收机钟差,s;dtsys为GPS-北斗系统时间差,s;dT为卫星钟差,s;dorb为卫星轨道误差,m;dtrop为对流层延迟误差,m;dion为电离层延迟误差,m;ε包含观测噪声与多路径误差,m。
在式(1)、式(2)中,对流层延迟误差通过Saastamoinen模型[4]改正,电离层延迟误差通过Klobuchar模型[5]改正,卫星位置和卫星钟差通过广播星历计算得到。北斗的坐标系统为中国2000大地坐标系统(CGCS 2000),GPS的坐标系统为WGS-84,但两个坐标系统相差仅在厘米级,而单频伪距单点定位的精度在米级,故在解算过程中无需进行坐标转换[6]。北斗的时间系统为北斗时,GPS的时间系统为GPS时,两时间系统除了有一个14 s的偏差外[6],还有一个小于1 s且随时间变化的偏差[7-8],因此需要估计一个额外的GPS-北斗系统时间差参数。忽略轨道误差以及残留的卫星钟差后,待估参数包括三维位置坐标、接收机钟差以及GPS-北斗系统时间差。
1.1 先验定权方法
先验定权方法可以粗略地获得GPS与北斗这两个卫星系统观测值的合理权比,但需要得到两卫星系统观测值的先验方差。但由于受到多种误差的综合影响,先验方差通常不能准确获得。在具体实施的过程中,通常是选择较长时间的观测数据进行测试,不断调整两卫星系统观测值的先验方差,即两卫星系统观测值的权比[2],获得最优定位精度的权比即为两卫星系统观测值的合理权比。
1.2 验后定权方法
Helmert验后方差分量估计是一种典型的验后定权方法。它的基本思想是首先根据验前估计权进行预平差,用平差后得到的残差信息来估计观测值的方差,根据方差的估计值重新进行定权,以改善初始权值,然后根据重新确定的权值再次进行平差,如此重复进行,直到不同类观测值的权趋于合理,详细处理过程见文献[3]。
1.3 考虑PDOP信息的定权方法
在GPS/北斗组合单点定位中,引入北斗卫星后,PDOP值的改善程度决定了组合系统能否有效提高定位精度。考虑PDOP信息定权方法的基本思想是:在先验定权方法确定的两卫星系统观测值的合理权比基础上,根据引入北斗卫星后,GPS/北斗组合系统PDOP值的改善程度来微调北斗系统观测值的权值,原则上对组合系统PDOP值改善程度大的北斗系统观测值赋予较大的权,反之,则赋予较小的权。
本文根据上述思想,经过大量数据验证后,建立了考虑PDOP信息的定权模型。设PDOP1与PDOP2分别表示一个历元中GPS单系统与GPS/北斗组合系统的PDOP值,则考虑PDOP信息后,两系统观测值的定权公式变更如下:
(3)
式中:P1为GPS系统观测值的初始权矩阵;P2为北斗系统观测值的初始权矩阵;M值为经验值,该值的作用是保证北斗系统观测值的权值经过微调后,两卫星系统观测值权比和先验定权方法确定的两卫星系统观测值合理权比相差不大。首次使用该模型时,可以使用较长时间的观测数据进行试算,根据以下公式求得M值:
M=1/Avg(cos(PDOP2/PDOP1)).
(4)
式中,Avg(cos(PDOP2/PDOP1))是试算数据中所有历元cos(PDOP2/PDOP1)值的均值。
2 观测环境与数据采集
为了测试考虑PDOP信息定权方法的可行性,特采集了开阔环境和遮挡环境下的静态观测数据和动态观测数据进行分析。如图1(a)所示,开阔环境下的静态观测点位于中南大学附近的一栋居民楼楼顶;如图1(b)所示,遮挡环境下的静态观测点位于中南大学采矿楼前的一片树林区域中;如图1(c)、图1(d)所示,动态观测点位于长沙市岳麓区梅溪湖附近区域。在开阔环境观测中,卫星信号没有任何遮挡;在遮挡环境观测中,部分卫星信号会被树叶遮挡。需要说明的是,在动态观测中,一个同型号接收机会设立在流动站附近作为基站,从而可以通过双差RTK技术获得流动站的参考坐标。

图1 GPS/北斗静态和动态野外数据采集
采集数据的接收机是由南方测绘公司生产,接收机型号是SOUTH S82-C。该接收机可以输出采样率为1 Hz的GPS L1/L2双频数据和北斗B1/B2双频数据。采集数据时截止高度角设为10°,观测数据的其他信息见表1。由于导航用户大多使用单频接收机,因此只利用L1/B1上的伪距观测值进行分析。
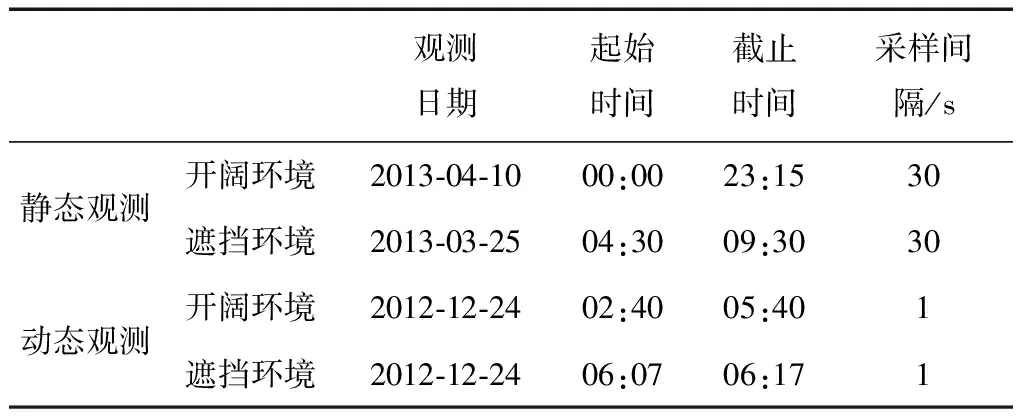
表1 观测数据详细信息
3 结果与分析
3种定权方案用于GPS/北斗组合单点定位。方案1:先验定权;方案2:考虑PDOP信息定权;方案3:验后定权,即Helmert方差分量估计。
下面对用于评定定位精度的参考坐标进行说明。对于静态观测,利用该站所测GPS数据进行精密单点定位[9-10]获得的位置解作为参考坐标。对于动态观测,首先利用基站所测GPS数据进行精密单点定位获得基站坐标,然后再利用流动站所测GPS数据进行差分定位获得流动站坐标,将计算得到的流动站坐标作为动态观测的参考坐标。
为了通过先验定权方法获得GPS与北斗这两个卫星系统观测值的合理权比,选取开阔环境静态观测数据进行分析。如图2所示,是GPS/北斗组合单点定位取不同权比时三维定位误差的RMS统计值。从图2中可知,当权比为1∶1,即GPS与北斗的先验方差相等时,定位精度最高。因此,在第1种定权方案中,取两卫星系统观测值的权比为1∶1。在使用方案2之前,需要求得M值。对开阔环境静态观测数据进行处理,根据式(4)求得的M值为1.2,以此作为M的经验取值,进行后文的分析。

图2 GPS/北斗组合单点定位取不同权比时三维定位误差的RMS统计值
图3所示是利用开阔环境静态观测数据,使用3种定权方案进行GPS/北斗组合单点定位的结果。图4是相应的可见卫星数与PDOP值。从图3中可知,3种定权方案的定位结果相差不大,并且变化趋势一致。为了体现考虑PDOP信息定权方法的优势,选取组合系统相对于GPS单系统PDOP值改善明显的时间段进行分析,如时间段04:53:30到05:44:30(两竖虚线标示处)。从图3中可知,在这个时间段内,方案2的定位误差要明显小于方案1和方案3。经统计,方案1和方案3东、北、高3个方向的最大误差分别为-2.403 m,2.698 m,-9.656 m和-2.822 m,2.650 m,-7.990 m;而方案2东、北、高3个方向最大误差分别为-1.872 m,2.153 m,-5.212 m。导致这一结果的原因是,这段时间内,GPS只有6颗卫星,其PDOP值显著增大,而方案1并没有考虑到PDOP信息的影响,方案3缺少足够多的多余观测。并且从图3中可知,在12:00和16:00附近时间段,方案2高程方向的定位误差要远小于方案1和方案3。

图3 开阔环境静态观测数据GPS/北斗组合单点定位结果
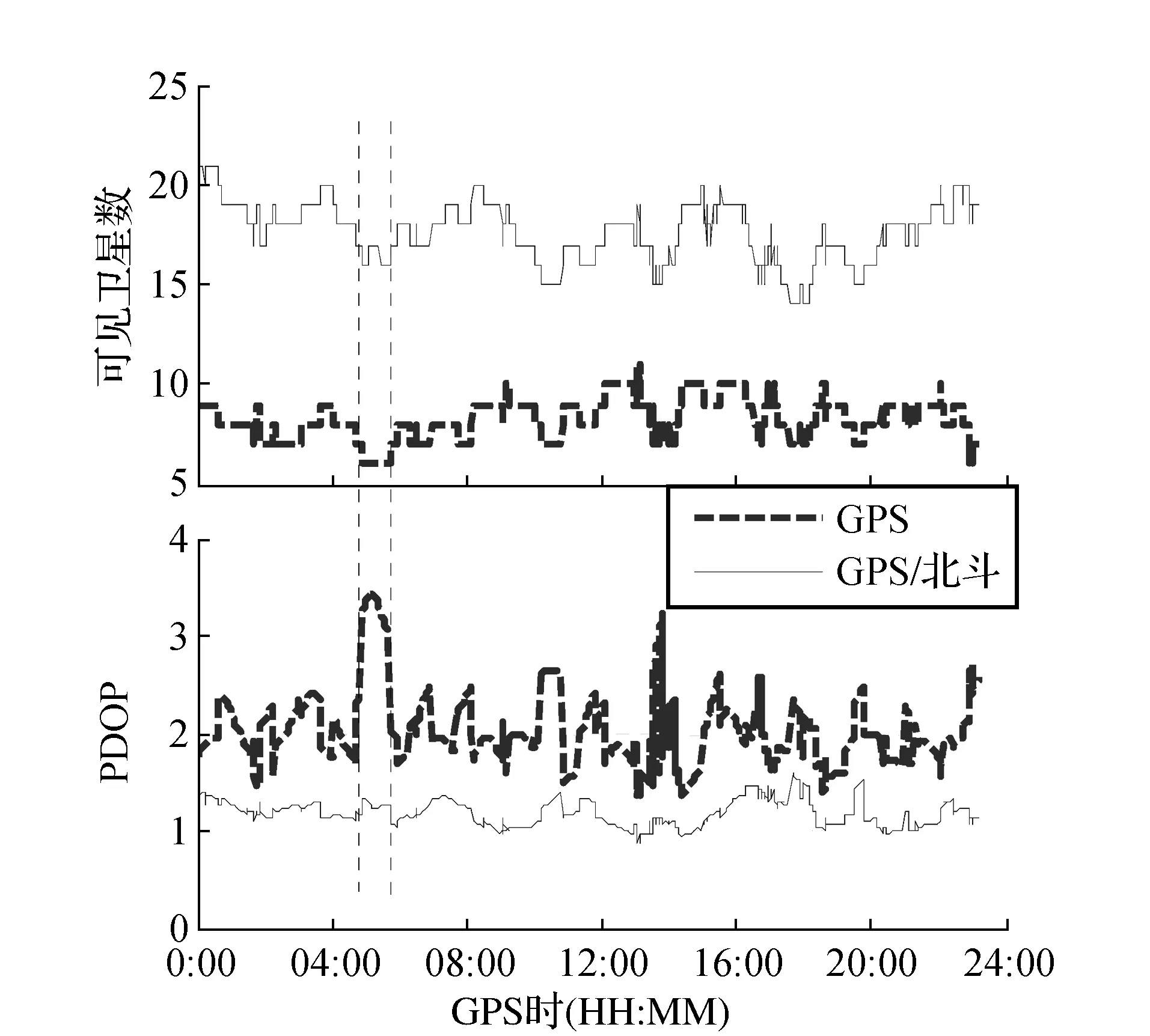
图4 开阔环境静态观测数据可见卫星数与PDOP值
为了分析可见条件不好情况下的定位情况,特对遮挡环境数据进行分析。图5所示是利用遮挡环境静态观测数据,使用3种定权方案进行GPS/北斗组合单点定位的结果。图6是相应的可见卫星数与PDOP值。从图中可知,在时间段05:55:30到06:53:00 (两竖虚线标示处),GPS卫星只有6颗,其PDOP值显著增大,导致方案3的定位结果出现严重发散现象,要明显差于方案1和方案2。并且在这段时间内,方案2东、北方向的定位误差要明显小于方案1。从图5中还可知,在08:30到09:30时间段内,方案3诸多历元的定位结果在东方向和高程方向发散。

图5 遮挡环境静态观测数据GPS/北斗组合单点定位结果

图6 遮挡环境静态观测数据可见卫星数与PDOP值
表2所示是静态观测数据进行GPS单系统、北斗单系统、GPS/北斗组合系统单点定位的定位误差RMS统计值。从表2中可知,北斗单点定位的精度达到甚至超过GPS单点定位的水平;双系统组合单点定位的精度要明显优于单系统;在开阔环境中,方案2和方案3的定位精度相差不大,并且二者定位精度要明显优于方案1;在遮挡环境中,方案2定位精度最高,方案1次之,方案3最差。因此,在遮挡环境中没有足够多的多余观测,不建议使用方案3进行GPS/北斗组合单点定位定权。

表2 静态观测GPS单系统、北斗单系统、GPS/北斗组合系统单点定位误差RMS统计值 m
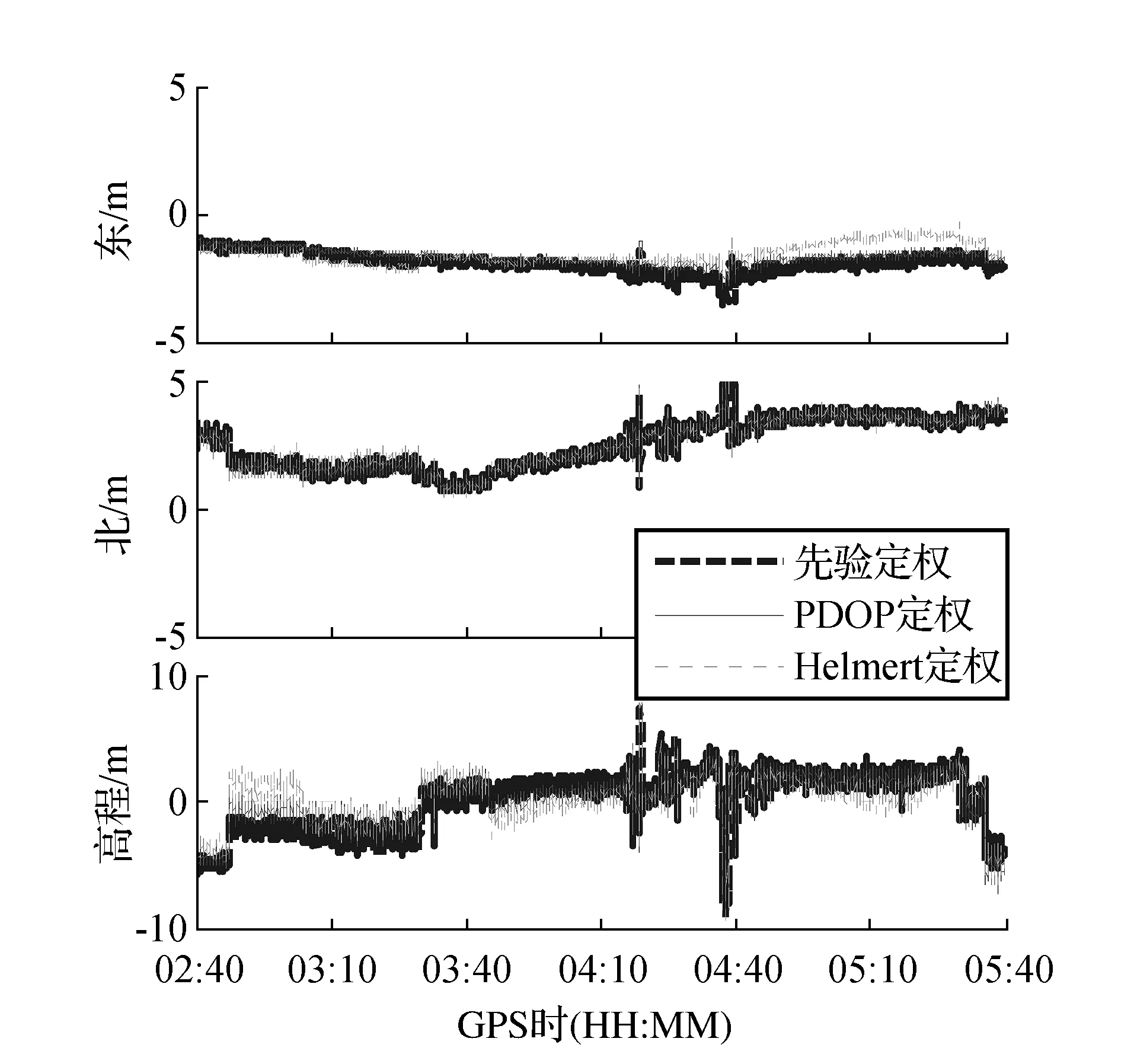
图7 开阔环境动态观测数据GPS/北斗组合单点定位结果
2012年12月24日进行了开阔环境和遮挡环境下的动态测试。图7所示是利用开阔环境动态观测数据,使用3种定权方案进行GPS/北斗组合单点定位的结果。从图7中可知,3种定权方案北方向的定位结果基本一致,而方案2和方案3东方向、高程方向的定位结果要明显优于方案1。图8所示是利用遮挡环境动态观测数据,使用3种定权方案进行GPS/北斗组合单点定位的结果。从图8中可知,方案1和方案2东方向、北方向的定位结果要明显优于方案3。而在高程方向,在06:10:33之前,方案1、方案2出现明显偏差,在06:10:33之后,由于GPS卫星从7颗降为6颗或5颗,导致3种定权方案均出现明显偏差,但总体来看,方案2的定位结果优于其他两种方案。
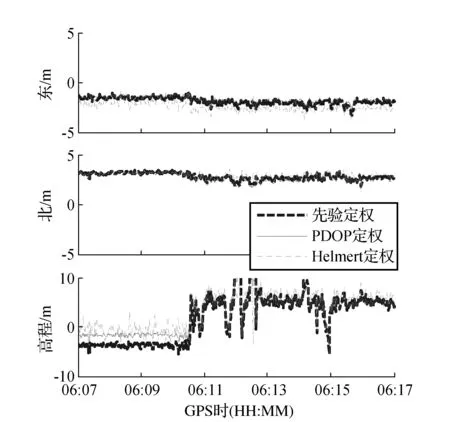
图8 遮挡环境动态观测数据GPS/北斗组合单点定位结果
表3所示是动态观测数据进行GPS单系统、北斗单系统、GPS/北斗组合系统单点定位的定位误差RMS统计值。从表3中可知,在开阔环境下,方案2和方案3的定位精度相差不大,并且二者定位精度要明显优于方案1;在遮挡环境下,方案2定位精度最高,方案1次之,方案3最差。和静态观测数据所得结论相符。

表3 动态观测GPS单系统、北斗单系统、GPS/北斗组合系统单点定位误差RMS统计值 m
4 结束语
在GPS/北斗组合单点定位中,由于观测值来自两个不同的卫星系统,因此需要确定两个卫星系统观测值的合理权比。目前,主要有两种方法来获得这一权比。一种是先验定权,即得到两卫星系统观测值的先验方差;另一种是验后定权,如Helmert方差分量估计。这两种方法各有缺点,基于此,提出了一种考虑PDOP信息的观测值定权方法,即在先验定权的基础上,考虑了观测卫星空间几何分布的影响。利用开阔环境和遮挡环境下的静态观测数据和动态观测数据进行分析,得出以下结论:在开阔环境下,考虑PDOP信息定权方法的定位精度和验后定权方法相差不大,并且二者均优于先验定权方法;在遮挡环境下,考虑PDOP信息定权方法的定位精度最高,相比先验定权方法,三维定位精度最大改善率达到了14.0%。
[1]CAI C,GAO Y.A combined GPS/GLONASS navigation algorithm for use with limited satellite visibility[J].Journal of Navigation,2009,62(4):671-685.
[2]CAI C,GAO Y,PAN L.An analysis on combined GPS/ COMPASS data quality and its effect on sigle point positioning accuracy under different observing condtions [J].J.Adv.Space Res.,2013,DOI:10.1016/j.asr.2013.02.019
[3]HELMERT F R.Die Ausgleichungsrechnung nach der Methode der kleinsten Quadrate[M].Zweite Auflage,Teubner,Lepzig,1907.
[4]SAASTAMOINEN J.Contribution to the theory of atmospheric refraction[J].Bulletin Géodésique,1973,107:13-34.
[5]KLOBUCHAR J.Ionospheric Time-Delay Algorithms for Single-Frequency GPS Users[J].IEEE Transactions on Aerospace and Electronic Systems,1987,AES-23(3):325-331.
[6]SHI C,ZHAO Q,HU Z, LIU J.Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites[J].GPS Solutions,2012,17(1):103-119.
[7]CSNO.Beidou navigation satellite system signal in space interface control document (open service signal B1I),China Satellite Navigation Office,Version 1.0,December 2012.
[8]IS-GPS-200F.Global positioning system directorate systems engineering and integration interface specification,September 21,2011.
[9]ZUMBERGE J F,HEFLIN M B,JEFFERSON D C,et al.Precise point positioning for the efficient and robust analysis of GPS data from large networks[J].Journal of Geophysical Research,1997,102(B3):5005-5017,doi:10.1029/96JB03860.
[10]陈蕾,许文桓.基于单频GPS精密单点定位算法研究[J].测绘工程,2013,22(1):21-24.
[责任编辑:刘文霞]
A weighting approach considering visible satellites’ geometry distribution for combined GPS/Beidou single point positioning
PAN Lin,CAI Chang-sheng,DAI Wu-jiao,ZHU Jian-jun
(School of Geosciences and Info-Physics,Central South University,Changsha 410083,China)
In the combined GPS/Beidou single point positioning (SPP),there are two main ways to get the weight ratio between GPS and Beidou observations.One is a-priori weighting method where a-priori variances of two different satellite systems’ observations should be acquired.The other one is a-posteriori weighting method,such as the Helmert variance component estimation (VCE).The a-priori weighting method is simple,but the weight ratio acquired in this method is not accurate.The a-posteriori weighting method is rigor,but it requires high redundant observations.Position Dilution of Precision (PDOP) can reflect the condition of visible satellites’ geometry distribution.Because of this,a weighting approach considering the PDOP information for combined GPS/Beidou SPP is proposed.In the new weighting method,the influence of visible satellites’ geometry distribution is further considered on the basis of a-priori weighting method.Both static and kinematic tests in open sky and under trees are conducted.The results indicate the positioning accuracy of the new weighting method is comparable to the a-posteriori weighting method,and outweighs the a-priori weighting method in open sky.Under trees,the new weighting method achieves the best positioning accuracy.
GPS;Beidou;single point positioning;weighting;PDOP
2013-11-13
国家自然科学基金资助项目(41004011);湖南省国土资源厅科技资助项目(2012-41)
潘 林(1989-),男,硕士研究生.
P228.4
:A
:1006-7949(2014)12-0025-06
猜你喜欢
中国惯性技术学报(2020年2期)2020-07-24
山东冶金(2019年5期)2019-11-16
成都信息工程大学学报(2019年3期)2019-09-25
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
雷达学报(2017年1期)2017-05-17
自动化学报(2017年5期)2017-05-14
山东工业技术(2016年15期)2016-12-01
信息记录材料(2016年4期)2016-03-11