
基于Pro/E的机械零部件三维动态序列装配技术研究
2014-08-24 09:37张莉莎李小龙杨松林
河北工业科技 2014年2期
张莉莎,李小龙,孙 政,杨松林
(河北科技大学机械工程学院,河北石家庄 050018)
基于Pro/E的机械零部件三维动态序列装配技术研究
张莉莎,李小龙,孙 政,杨松林
(河北科技大学机械工程学院,河北石家庄 050018)
三维动态序列装配技术在机械产品和工程设计行业的设计、制造、检测、展示、学习、资金节约、功效提高等方面具有非常重要的意义,其制作具有一定的技术复杂性和技巧性,目前许多三维CAD软件有此功能,但很少有此方面的具体介绍,为了给机械及工程技术人员提供一些有益的借鉴,以某高楼外墙清洗机吸盘部件三维动态序列装配动画的制作为例,针对Pro/E三维机械设计软件的动态序列装配技术进行了详细介绍,给出了整个制作流程。
Pro/E;装配;机械零件;装配动画
在目前信息化、智能化、可视化的机械零部件或工程设计领域的销售、宣传、示范说明、装配、拆解、维修等过程中,可以采用三维动态序列装配技术,该项技术运用的好,往往可以给用户留下深刻的理解与印象[1]。但其制作技术涉及到许多方面,如三维造型、装配、渲染、动画、后期制作等等[2-3]。在Pro/E系统中,为用户提供了制作机械零部件三维动态序列装配功能,可以在“动画”模块(即Design Animation模块)中完成。但会涉及到一些难理解的术语,例如动画时域、主体、快照、关键帧序列、定时显示、定时透明、定时视图等[4]。在实际制作过程中,存在很多问题,本文就此展开研究并摸索了一条可行的思路。
1 准备工作
如果希望在“动画”模块中顺利的制作出一个组件的三维动态序列装配动画,一些前期的准备工作是必不可少的,其充分与否直接影响装配动画制作的质量。因此,通过对多次制作经验的总结,在做装配动画之前要做好以下准备工作[5-6]。
1)零件三维造型 在Pro/E 软件的“标准”模块中精确创建装配体所需的三维实体零件。
2)三维静态装配 新建组件,在“组件”模块中将三维实体零件建立完全约束,实现静态装配。
3)附加材质 将装配好的三维实体零件附上比较真实的材质,同时可以添加合适的灯光、场景等效果。
4)建立合适约束 由于一些动画效果需要在装配中定义与源装配不同的约束条件才能实现。因此,如果在静态装配中某些零件使用了销钉、滑动杆等链接约束,做三维动态序列装配之前应将装配体备份,删除链接,建立完全约束。
5)视向确定 在“标准”模块中创建出“东南”、“西南”、“东北”、“西北”4个标准视图方向,这样省去了在“动画”模块中新建视图方向时手动调试的麻烦,而且视图方向也比较标准。
6)拆装规划 在做好以上几步工作以后,需要根据具体的机械零部件,按照一定的装配顺序对其装配或拆卸过程有一个整体的规划[7]。
2 制作流程
做好这些前期准备工作后,就可以通过单击“应用程序”菜单,选择“动画”命令,启动动画界面,进入到“动画”模块中创建装配动画。下面给出在Pro/E 5.0中创建动画时可能采取的典型步骤。图1所示为装配动画制作流程图[8]。
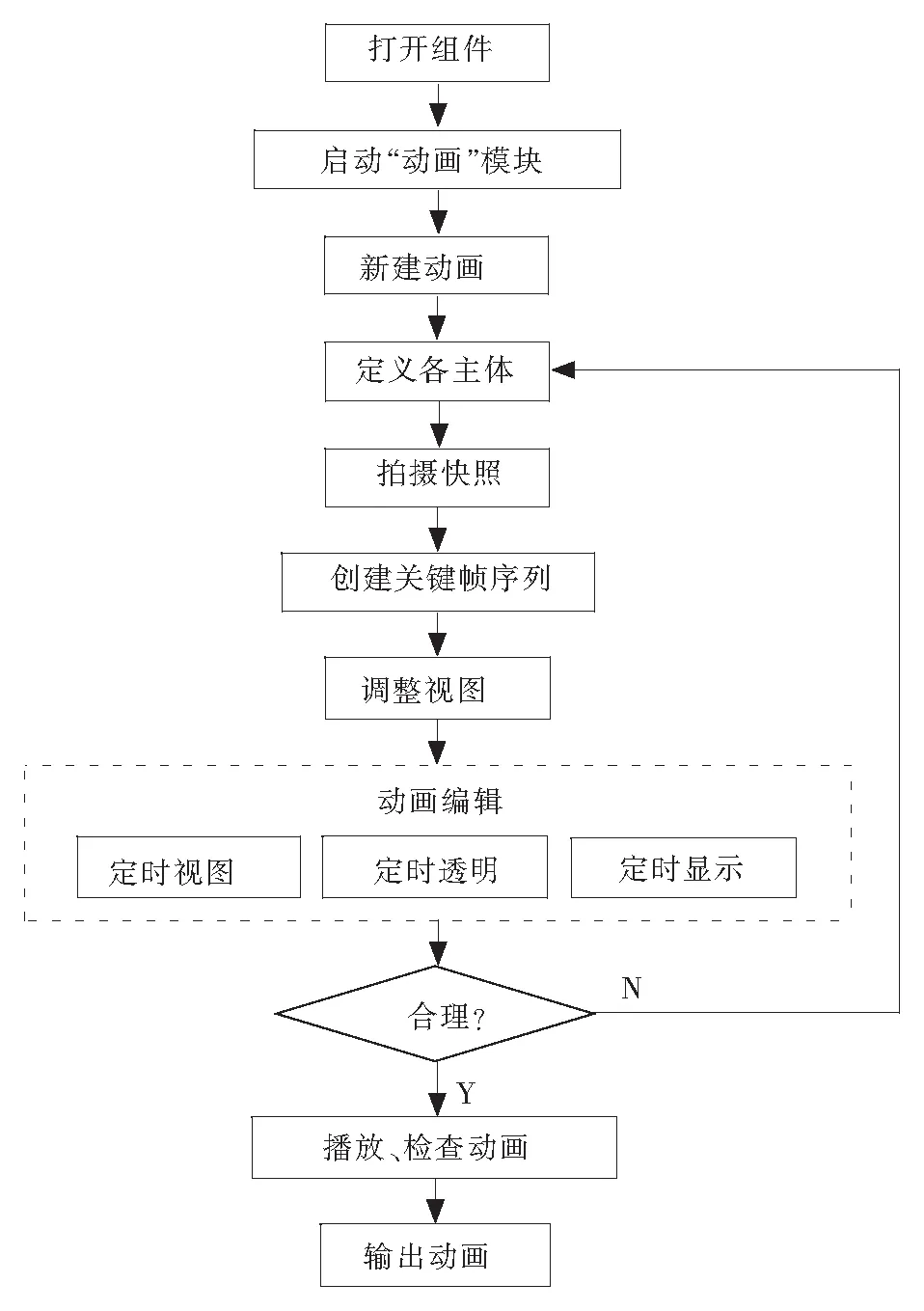
图1 装配动画制作流程图Fig.1 Assembly technology of dynamic virtual flow chart
1)在Pro/E 5.0中打开一个组件并启动“动画”模块;
2)创建一个新动画,使用“重命名”为其指定一个有意义的名称;
3)根据装配过程合理定义该组件的主体;
4)拖动主体并生成一连串的快照;
5)将所生成的快照建立关键帧序列;
6)重定向视图,创建装配动画所需视图;
7)调整关键帧,编辑定时视图、定时显示以及定时透明等,完善装配动画;
8)播放、检查动画;
9)保存并输出动画文件;
10)反复调试、修改,直至达到设计者或用户满意的效果,得到最终作品。
3 制作实例
高楼外墙清洗机吸盘部件由支撑架、支撑薄板、气缸、安装架以及真空吸盘构成,各个构件通过螺栓、螺母连接固定[9-13]。
3.1进入动画模块
在Pro/E 5.0中打开吸盘部件,单击“应用程序”菜单,选择“动画”命令启动动画界面,系统自动进入“动画设计”模块。
3.2新建动画
在动画设计模块中,单击“动画”菜单,选择“动画”命令,即弹出“新建动画”对话框,单击“新建”按钮,输入一个动画名称(如吸盘部件),即可创建名为“吸盘部件”的新动画。
3.3定义主体
主体是对组成一个整体进行移动的一组或一个零件的命名,主体中的零件组成一个整体而没有相对运动。在主体定义中, Ground称为“基础主体”,是动态序列装配中的第1件,它本身具有唯一性,且不会发生位置变化;Body是“基础主体”以外的其他“主体”,它们可以相对“基础主体”发生相对运动;Body主体可以定义多个,尤其是类型相同的零件可以定义为1个Body主体一起装配;其实整个定义主体过程就是1个Ground和多个Body的定义过程。
主体定义具体过程为打开“动画”菜单,单击“主体定义”,系统出现“主体”对话框,单击“新建”按钮,拾取同类型的零件,如图2所示;单击确定,即定义了一组主体。重复此操作,直至将所有零件都定义到规划的主体中。注意应该在Ground主体中留有基础零件或组件。
3.4拖动主体创建快照
单击工具栏上的“拖动元件”按钮,系统会自动弹出“拖动”对话框,在“高级拖动选项”中选择自由方式或沿坐标轴方向拖动一个主体,“拖动”对话框会根据所选的坐标系来显示拖动点的坐标,并且会随着模型的移动更新此坐标,当到达所需方位后,可单击快照按钮来捕获模型中每个主体的当前位置和方向。按照此方法和步骤,分别创建吸盘部件的各个主体动态序列安装位置的快照。对于吸盘部件,可以选择y方向坐标轴来确定拖动主体的方向,依次拍照,直至留下最后基础件,即“基础主体”,如图2所示的ground零件。
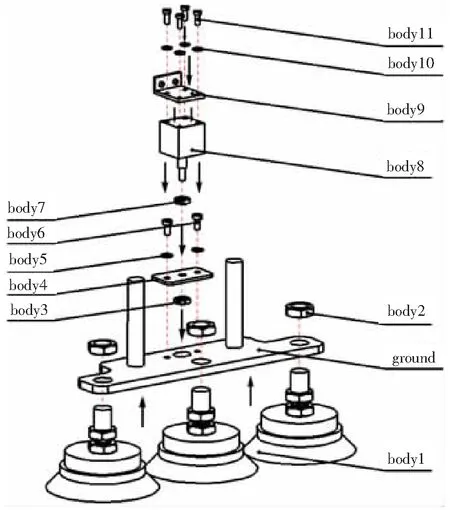
图2 主体装配示意图Fig.2 Schematic of main assembly
3.5建立关键帧序列
关键帧序列可以将之前创建的一系列快照按顺序进行连续排放,这些快照可显示某段时间内零件或组件在位置和方向上的变化,系统将会在这些关键帧间进行插值,以产生平滑的动画效果。
关键帧序列制作可以选择“动画”菜单中的“关键帧序列”命令,在“关键帧序列”对话框里,“序列”面板里存储着快照1到12,每次选定1个快照,增加1个时间间隔,直至最后1张快照,这样就得到了吸盘部件的拆卸过程帧序列动画;再单击反转按钮,即可将上面的快照进行倒序,由此就得到了整个动态序列装配过程的关键帧序列。
在创建或编辑关键帧序列时,可以预览现有快照、改变快照顺序、拍摄新的快照,以及将快照添加到关键帧序列中。在关键帧序列加入到动画中时,它会出现在时间线窗口中。每个关键帧皆用1个三角形来表示,这些三角形以线相连。时间线上的各种组成单元构成了动画的基础。可以编辑时间线的长度和增量、关键帧序列的长度以及时间线中所有组成单元的相对执行时间。同时可以在时间线上将1个三角形拖至另一个不同的时间点,相关联的关键帧会自动更新。其编辑和调整过程需要耐心、技巧和实践。
3.6视图调整
工具栏上的“重定向”命令,可以定义视图模型的位置、方向和大小。由于之前在准备工作中已经创建出“东南”、“西南”、“东北”、“西北”这4个标准视图方向,因此这一步就变得容易很多,可以在这几个标准视图方向的基础上进行编辑,调整视图位置和大小就可以,创建新的适合装配动画的视图。
3.7定时视图
为了使动态虚拟序列装配更加生动并且能够看清楚这些零件的装配过程,需要很好地设计每个视图的时间长短,其具体制作过程如下。
选择“动画”菜单中的“定时视图”命令,打开“定时视图”对话框。通过在名称面板里选择所需视图的名称(在重定向步骤中已经建立好的视图名称),同时在时间面板里输入需要显示所选视图的开始时间,单击应用即可。如果在装配过程中需要多个视图方向,按照同样的方法进行定义,需要注意的是如果在某一段时间内保证同一个视图不变,就需要在这段时间的末尾再添加一个与开始时相同的视图,那么动画就会在规定的时间显示不同的模型位置、方向和放大率。同样,2个不同视图之间会进行插值,产生平滑的视图改变的动画效果。
另外,还有定时显示、定时透明等功能,其创建过程与定时视图基本相同,故在此不再赘述。
3.8生成理想动态装配效果
所有内容均定义完毕后,单击工具栏上的“启动”按钮,播放动画,如有不协调的状况则再进行微调,直至达到理想的三维动态序列装配效果。
单击工具栏上的“回放”按钮,再次运行动画,并可以更改速度或方向,检查干涉和其他结果。如果没有问题,单击回放对话框中的“捕获”按钮,弹出“捕获”对话框,设置合适的动画分辨率和动画格式等,将动画导出。在捕获动画之前应该将“增强真实感”按钮按下,如果加上材质效果,导出的动画效果就比较真实,但同时导出的时间也相应增长。
4 结 语
在Pro/E 5.0三维机械设计软件中,由于三维动态序列装配技术的一些概念和功能的理解不易,很难制作出满意的动态装配动画,如果按照本文提供的思路,并经过反复训练,即可得到很好的三维动态序列装配效果[14]。
/
[1] 王 南,郝莉红,张莉婷,等.基于ADAMS/View的双横臂独立悬架的运动学仿真分析[J].河北工业科技,2012, 29(4):214-216. WANG Nan, HAO Lihong, ZHANG Liting, et al. Kinema-tics simulation of double-wishbone suspension based on ADAMS/View[J]. Hebei Journal of Industrial Science and Technology, 2012, 29(4): 214-216.
[2] 陈 旻.虚拟技术在机械装配工序中的应用[J].机电技术,2010, 33(2):115-117. CHEN Min. Unsaturated polyester resin[J]. Mechanical & Electrical Technology, 2010, 33(2): 115-117.
[3] 姚竞争,韩端锋,李 健.基于CATIA系统的虚拟装配仿真研究[J].船舶工程,2011, 33(1):49-52. YAO Jingzheng, HAN Duanfeng, LI Jian. Simulation study on the virtual assembly based on CATIA[J]. Ship Engineering, 2011, 33(1): 49-52.
[4] 朱玉红.基于PRO/E的机械零件虚拟装配方法[J].机械制造与自动化,2004, 33(2):67-68. ZHU Yuhong. The application of mechanical assembly based on PRO/E[J]. Machine Building & Automation, 2004, 33(2): 67-68.
[5] 杨云斌,欧阳勇,孙素梅,等.虚拟装配过程中不确定性因素分析[J].制造业自动化,2011, 33(10):63-66. YANG Yunbin, OUYANG Yong, SUN Sumei, et al. Analysis of uncertainty factors in virtual assembly process[J]. Manufacturing Automation, 2011, 33(10): 63-66.
[6] 崔 钢,丁 吉.虚拟装配工艺技术研究[J].电脑编程技巧与维护,2009(sup):138-139. CUI Gang, DING Ji. Virtual assembly technics[J]. Computer Programming Skills & Maintenance, 2009(sup): 138-139.
[7] 刘云华,赵 伟.机械产品模型自动装配动画的研究与实现[J].机械设计与制造,2007(3):6-8. LIU Yunhua, ZHAO Wei. Research and implementation of animation of mechanic product model automatic assembly[J]. Machinery Design & Manufacture, 2007(3): 6-8.
[8] 谢 叻,肖 波,吴巧教,等.虚拟装配技术及应用[J].模具技术,2006(1):60-63. XIE Le, XIAO Bo, WU Qiaojiao, et al. Virtual assembling technology and its application[J]. Die and Mould Technology, 2006(1): 60-63.
[9] 王春升.机械零件三维造型及虚拟装配方法研究[J].机械研究与应用,2009(3):6-7. WANG Chunsheng. Molding of 3D mechanical and its research virtual assembly[J]. Mechanical Research & Application, 2009(3): 6-7.
[10] 何连英.机械零件虚拟装配方法[J].水利电力机械,2003, 25(5):51-52. HE Lianying. Application for mechanical virtual assembly[J]. Water Conservancy & Electric Power Machinery, 2003, 25(5): 51-52.
[11] 何连英.基于Pro/E的机械零件虚拟装配方法[J].新疆大学学报(自然科学版),2002,19 (3):379-380. HE Lianying. Pro/E application for mechanical assembly[J]. Journal of Xinjiang University (Natural Science Edition),2002,19 (3):379-380.
[12] 李奉香,黄 政,万志华,等.基于RPO/E的虚拟装配、运动仿真与装配动画[J].计算机与数字工程,2011, 39(1):134-137. LI Fengxiang, HUANG Zheng, WAN Zhihua, et al. Virtual assembly,movement simulation and assembly cartoon based on PRO/E[J]. Computer & Digital Engineering, 2011, 39(1): 134-137.
[13] 王桂梅,李凤玲,张 平,等.基于PRO/E和NASTRAN的装载机工作装置模态分析[J].河北工程大学学报(自然科学版),2011,28(3):91-93. WANG Guimei, LI Fengling, ZHANG Ping,et al. Modal analysis of olader′s work device with the combination of PRO/E and NASTRAN[J].Journal of Hebei University of Engineering(Nataral Science Edition),2011,28(3):91-93.
[14] 杨树川,邵金龙,杨术明,等.基于Solidworks & SimMecha-nics的机构运动分析与仿真[J].河北工业科技,2011, 28(4):221-225. YANG Shuchuan, SHAO Jinlong, YANG Shuming, et al. Solidworks/SimMechanics based mechanism kinematic analysis and simulation[J]. Hebei Journal of Industrial Science and Technology, 2011, 28(4): 221-225.
Research on assembly technology of three-dimensional dynamic sequence based on Pro/E
ZHANG Lisha, LI Xiaolong, SUN Zheng, YANG Songlin
(School of Mechanical Engineering, Hebei University of Science and Technology, Shijiazhuang Hebei 050018, China)
The assembly technology of three-dimensional dynamic virtual sequence is very important in designing, manufacture, testing, displaying, learning, capital saving, and effectiveness improving for mechanical products and engineering industries. It has technical complexity and technique in its production. Now many three-dimensional CAD softwares have the function, but with few intro in this regard. In order to provide useful lessons for people who are engaged in mechanical and engineering technology, and taking sucker parts of the high-rise exterior cleaning machine as an example to make its three-dimensional dynamic virtual assembly animation, this article gives us not only a detailed description of this technology in connection with the 3D mechanical design software Pro/E, but also the entire technical process. It proves to be a feasible idea.
Pro/E; assembly; mechanical part; assembly cartoon
1008-1534(2014)02-0164-04
2013-10-28;
2013-11-12
河北省高校科学技术研究青年基金(Q2012073)
张莉莎(1988-),女,河北邯郸人,硕士研究生,主要从事制造业信息化方面的研究。
杨松林教授。E-mail:375086472@qq.com
TP319
A
10.7535/hbgykj.2014yx0216
责任编辑:李 穆
张莉莎,李小龙,孙 政,等.基于Pro/E的机械零部件三维动态序列装配技术研究[J].河北工业科技,2014,31(2):164-167.
ZHANG Lisha, LI Xiaolong, SUN Zheng, et al.Research on assembly technology of three-dimensional dynamic sequence based on Pro/E[J].Hebei Journal of Industrial Science and Technology,2014,31(2):164-167.
猜你喜欢
天津科技(2022年5期)2022-05-31
中学生数理化·中考版(2017年6期)2017-11-09
非公有制企业党建(2017年10期)2017-11-03
大连理工大学学报(2017年4期)2017-08-07
现代兵器(2017年4期)2017-06-02
现代兵器(2017年4期)2017-06-02
现代计算机(2017年7期)2017-04-22
网络安全和信息化(2017年3期)2017-03-10
重庆交通大学学报(自然科学版)(2016年1期)2016-05-25
西北工业大学学报(2015年3期)2015-12-14
