
车辆电液主动悬架PID最优控制研究
2014-08-23 00:46范超雄孙子尧
森林工程 2014年1期
赵 强, 范超雄,孙子尧,陈 杰
(东北林业大学 交通学院,哈尔滨 150040)
车辆是一个相当复杂的多自由度机械振动系统,在行驶过程中,路面不平度及行驶状态的改变等都引起车辆的行驶姿态发生改变,产生振动和噪声[1]。车速的提高以及人们对车辆的乘坐与驾驶品质的高要求,学者及相关汽车研发部门越来越关注性能优越的主动悬挂,提出了最优控制[2-4]、预见控制[2]、滑模控制[5]等方法,研究结果表明有效地改善了主动悬架的行驶平顺性。但多数学者采取理想化的处理液压作动系统,而在实际生产中,普遍采用液压作动系统提供的作用力和车体运动密贴相关,具有固有的非线性特性,因而对非线性作动器设计性能优越的力跟踪控制器,具有较大的工程实际意义。
建立1/4车辆被动和主动悬架系统的振动模型及液压伺服系统模型,设计PID内环控制器跟踪力和最优控制器实现性能指标的级联控制策略。通过Matlab/Simulink建立仿真模型验证设计方法的正确性和有效性,并在此基础上对该车辆悬架系统减振效果进行性能分析。
1 1/4车悬架模型的建立
本文针对1/4车二自由度线性车辆模型的有效性,首先建立了1/4车辆的2DOF被动及主动悬架的简化模型,如图1和图2所示,主动悬架则是在被动悬架的基础之上布置液压作动器,还包括液压伺服系统,控制器及传感器等。原理为:由传感器(陀螺仪)将测得车身加速度反馈给控制器,控制器根据输入的车身振动加速度信号进行设计运算,得出控制电压,再经伺服放大器完成电压到控制电流的转换,进而输入到伺服阀,伺服阀根据输入的电流信号,产生相应的阀芯运动,改变液压泵输入到液压作动器里的流量及方向,从而控制液压作动器的输出力,使车体振动得以有效抑制。在所建悬架模型中,表示簧载质量;表示非簧载质量;表示主动控制力;表示减振器的阻尼;表示非簧载质量的位移;表示簧载质量的位移;表示路面输入激励;表示轮胎刚度;表示弹簧刚度。1/4车辆的2DOF被动及主动悬架的微分方程如公式(1)和公式(2)所示:

图1 2DOF被动悬架模型
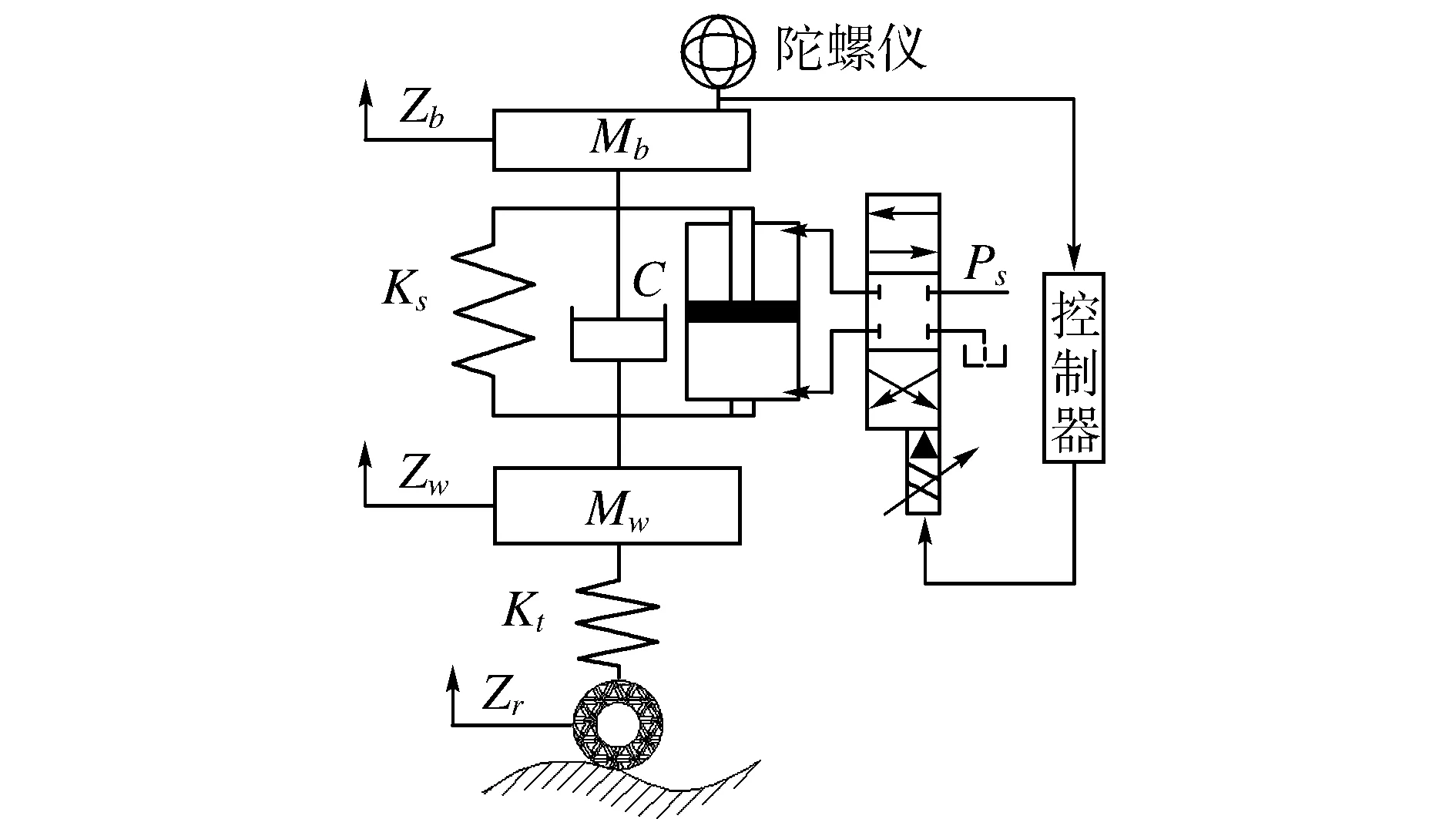
图2 2DOF主动悬架模型
被动悬架:
(1)
主动悬架:
(2)
2 电液作动器动力学模型
应用伺服阀控制液压缸的电液作动器,由控制器解算出控制电流输入到伺服阀以控制液压缸产生相应的作动力的方式,为典型的电液力伺服控制系统[2],主要参数见表1,动力学模型如下:
液压缸流量连续性方程为:
(3)
液压缸活塞杆输出力方程为:
F=p1A1-p2A2=pLA1。
(4)
液压缸流量线性化方程为:
QL=Kqxv-KcpL。
(5)

表1 液压作动器的主要参数
通常,可简化处理电液伺服阀的输入电流到阀芯位移的关系,表示为比例环节传递函数:Xv/I=Ksv,伺服放大器是电压U转化电流I,起限制电流范围的作用,频宽较大,高于液压固有频率,可以比例环节简化,即I/U=Ka,则阀芯位移与电压的关系为:Xv=KsvKaU。经计算分析,可得到液压系统的伺服控制系统的传递函数:
F(s)=
(6)
3 控制器的设计
3.1 控制器结构设计
通过设计控制器来控制液压作动器产生主动力,从而降低路面输入对车体带来的冲击和振动,达到车辆的平顺性要求。然而,主动控制力的大小则是由平顺性性能指标所需求的理想力所决定的。在这里,把主动悬架控制部分设计为内外两环,控制器结构如图3所示,在内环控制部分,设计期望力跟踪控制器,跟踪外环提供的理想作用力[6];在外环控制部分,暂时忽略由于添加液压作动器而带来的非线性的动力学问题,只需利用控制器计算实现悬架主动控制期望的理想力。在内环,利用PID方法控制液压作动器产生主动控制力,而在外环的线性部分,根据平顺性目标设计最优控制器(LQG)。从而,对悬架系统提出了结合PID方法与最优控制的级联控制策略[5]。
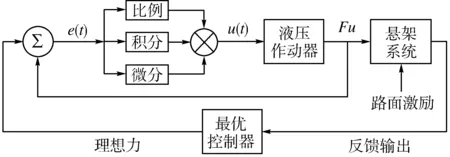
图3 内外环控制器结构
3.2 内外环控制器设计
(7)
(8)


在评价汽车的平顺性时,有3项指标最为重要,即:车身振动加速度(BA)和悬架的动挠度(SWS)以及轮胎的动载荷(DTL)。故定义性能指标函数为:
(9)
式中:q1、q2、q3分别为3项指标的加权系数,r作为约束系数。选取车身垂向加速度作为基准,并取其加权系数q1为1,不同的加权系数对系统的特性具有不同的影响[4]。选择q2、q3的原则为:在车身加速度最小的同时能够容许悬架的动作空间和轮胎压缩变形的范围内[6],加权系数可表示为矩阵q。则性能指标函数可表示为:
(10)
整理式(10)得到:
(11)
设:Q=CTqC,N=CTqD,R=r+DTqD,由LQG最优控制理论可知,可将式(11)向标准二次型化简:
(12)
根据极值原理推导出性能指标函数值达到最小时,最优控制律:
U=-R-1BTP=-KX。
(13)
式中:K为最优反馈增益矩阵,矩阵P可由以下代数黎卡提(Riccati)方程得到:
PA+ATP-PBR-1BP+Q=0。
(14)
矩阵A、B、C和D可以输入车辆参数求出;根据假设公式,可以求得矩阵Q、N和R,利用以上矩阵,调用Matlab函数[K,S,E]=LQR(A,B,Q,R,N)计算,最优主动悬架控制器的设计即可完成[7-8]。其中,得出的E为系统闭环特征值,而S则为上式黎卡提方程的解。
4 仿真与分析
在Simulink里选取模块搭建系统仿真模型,取车辆系统非簧载质量Mw=325 kg,簧载质量Mb=1 360 kg,减振器的阻尼系数C=1 500 N·S·m-1,轮胎的弹性刚度系数Kw=210 000 N·m-1,弹簧的刚度系数Ks=22 500/N·m-1[9]。本文选用PID控制和被动悬架作为对比算法,来验证最优控制器的有效性。仿真结果如图4~图6所示。

图4 车身加速度仿真结果比较

图5 悬架动挠度仿真结果比较
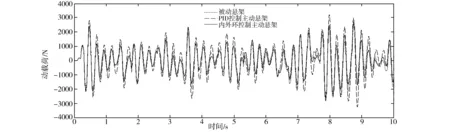
图6 轮胎动载荷仿真结果比较
通过Matlab分别求出被动悬架、PID控制和内外环控制的车身加速度、悬架动挠度及轮胎动载荷的均方根值见表2。

表2 车身加速度、悬架动挠度及轮胎动载荷的均方根值比较
由表2知,当路面输入为B级路面时,在设定工况下,内外环控制主动悬架相比于被动悬架,车身加速度、悬架动挠度和轮胎动载荷3个性能分别减少约54%、56%和6%;内外环控制主动悬架与PID控制主动悬架相比,车身加速度、悬架动挠度和轮胎动载荷3个性能分别减少约12%、22%和23%。很明显,在设定条件下内外环控制与PID控制均取得较好的控制效果,并且内外环控制的效果还优于PID控制。
5 结 论
将1/4车辆模型作为控制对象,在分析其动力学的基础上,建立悬架系统和液压伺服系统数学模型,并针对系统的特性,提出了一种PID控制与最优控制相结合的内外环控制策略。仿真结果显示,在轮胎动载荷基本不变条件下,内外环控制的主动悬架无论是与被动悬架还是PID控制主动悬架相比:车身加速度、悬架动挠度都有较大幅度的降低,减振效果明显。
【参 考 文 献】
[1]夏均忠,马宗坡,方中雁,等.汽车平顺性评价方法综述[J].噪声与振动控制,2012,32(4):9-13.
[2]薛长久.越野车电液主动悬架系统控制技术研究[D].长春:吉林大学,2008.
[3]胡景煌.汽车主动悬架的最优控制分析[J].机电技术,2012,35(1):42-47.
[4]许 昭.车辆主动悬架最优控制及悬架实验台研究[D].长沙:湖南大学,2007.
[5]Lai C,Liao W.Vibration control of a suspension system via a magnetorheological fluid damper[J].Journal of Vibration and Control,2002,8(4):527-547.
[6]张玉春,王良曦,丛 华,等.电液主动悬架滤波输出反馈控制器的设计及仿真实现[J].汽车工程,2004,26(3):325-330.
[7]柴陵江,孙 涛,冯金芝,等.基于层次分析法的主动悬架LQG控制器设计[J].汽车工程,2010,32(8):68-74.
[8]王 冰,韩冰源,王 岩,等.汽车磁流变减震器研究综述[J].森林工程,2008,24(4):39-43.
[9]张志飞,刘建利,徐中明,等.基于改进层次分析法的半主动悬架LQG控制器的设计[J].汽车工程,2012,34(6):58-63.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
数学年刊A辑(中文版)(2021年1期)2021-06-09
数学物理学报(2019年3期)2019-07-23
测控技术(2018年11期)2018-12-07
数学物理学报(2018年3期)2018-07-17
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
北京汽车(2016年6期)2016-10-13
通信电源技术(2016年4期)2016-04-04
现代制造技术与装备(2015年4期)2015-12-23
