
开源精密单点定位软件gLAB定位精度分析
2014-08-21 08:24:38田英国郝金明谢建涛张力洋薄军伟
全球定位系统 2014年1期
田英国 ,郝金明 ,谢建涛 ,张力洋 ,薄军伟
(1.信息工程大学导航与空天目标工程学院,河南 郑州 450001;2.66191部队,河北 张家口 076250;3.61234部队,新疆 乌鲁木齐 830000)
0 引 言
精密单点定位技术(PPP)最早由美国喷气动力实验室(JPL)的Zumberge(1997)等人提出,并在GIPSY 软件中得以实现[1]。目前该技术已被广泛应用于GNSS高精度测量、导航、定位、精密授时以及大气延迟计算等领域。与联合多测站观测数据实施网平差相比,PPP能够在保证解算精度的同时,方便用户实施且能有效减少用户的计算负担。用户通过一台双频双码GPS接收机就可以实现在数千平方公里乃至全球范围内的高精度定位。
国内外的相关科研机构和高校的众多学者对PPP技术展开了广泛、深入、细致的研究,并先后在PPP技术的理论模型、算法、软件等方面取得了丰富的科研成果。国际上部分高校或科研机构提供公开的源码和在线计算服务,例如,gLAB、GPSTK、 RTKLIB等软件都具有公开的源码,精密单点定位软件中心(PPPSC)则提供PPP在线计算服务[2-3]。
gLAB是一款具有公开源码、界面友好的GNSS数据处理软件包,由西班牙加泰罗尼亚科技大学的天文与测量研究组共同开发。gLAB当前的2.0版本只能处理GPS数据,但计划在后续的版本中兼容Galileo、GLONASS、EGNOS等系统的数据[4]。
本文根据实测数据对gLAB精密单点定位软件的定位精度进行了分析。选取2012年11月30日IGS站POL2观测数据对gLAB静态和静态模拟动态的精密定位结果进行处理,并将结果与IGS网站提供的精密坐标值以及在线PPP计算结果进行了比较,旨在为使用该软件提供参考。
1 精密单点定位基本模型
在GNSS精密单点定位中, 双频GNSS 接收机可同时获得L1和 L2 载波上的相位和伪距观测量,其观测方程[5]可表示如下:
(1)
(2)
GNSS精密单点定位主要模型如表1所示。
在使用gLAB进行精密单点定位的算例中,主要考虑了电离层延迟改正(LC消电离层组合)、对流程延迟改正(Niell模型+估计)、接收机天线相位中心改正(PCO+PCV)、卫星天线相位中心改正(PCO)、相对论效应改正、天线相位缠绕改正、硬件延迟偏差改正和潮汐改正(固体潮改正)等。
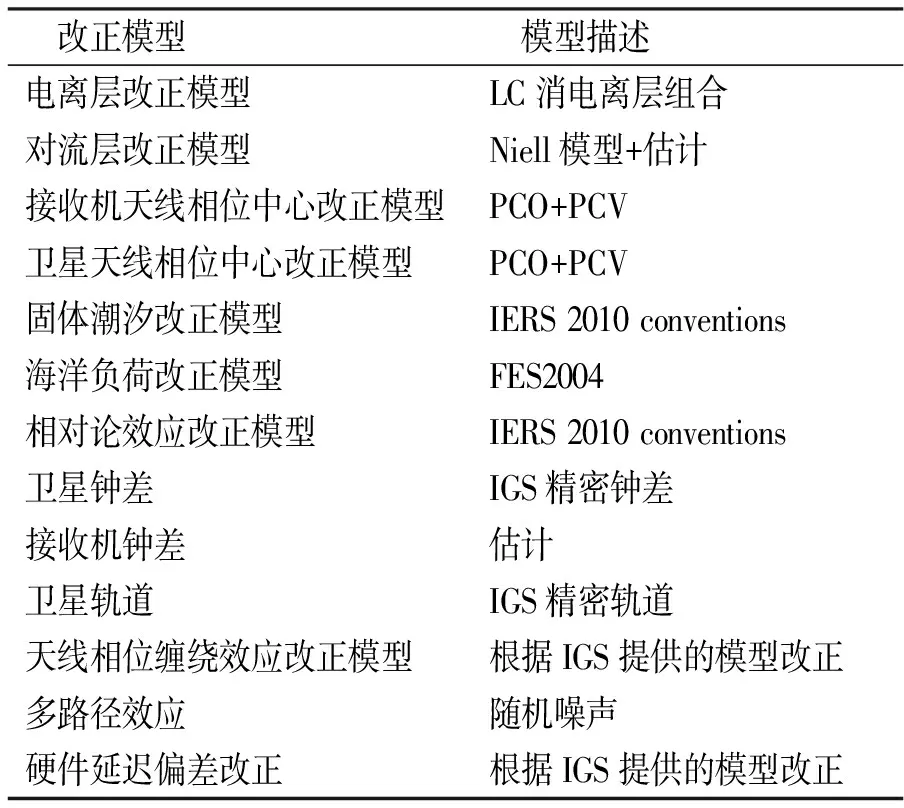
表1 文中采用的误差改正模型要素描述
2 实验分析
2.1 数据来源
为了比较和分析gLAB软件在不同运动状态及机动性条件下精密定位的精度情况,本文分别进行了静态、静态模拟动态计算。静态与静态模拟动态的数据随机选取了IGS地面跟踪站吉尔吉斯斯坦的比什凯克站POL2 采样率为30 s的单天观测数据,从IGS分析中心下载了对应时段的事后精密星历文件(SP3格式)、30 s采样率的卫星钟差文件以及相关的辅助信息文件。
在静态与静态模拟动态试验时,由于POL2 站的真实坐标已知(通过IGS网站中的Sinex文件获得),比较由gLAB软件解算得到的结果和真实坐标之间的差异,并将其转换至N、E、U三个方向来评价。另外,为了排除观测数据本身质量的影响,还将gLAB软件解算结果与在线PPP处理软件APPS、CSRS-PPP和MagicGNSS的结果进行比较分析。
2.2 静态PPP实验结果分析
使用gLAB、APPS、CSRS-PPP 、MagicGNSS分别计算POL2观测站在2012年11月30日静态定位结果并与其跟踪站的真实坐标相比较,得到在N、E、U 三个方向上的偏差如图 1、图 2及表 2所示(APPS和MagicGNSS静态解只提供最终解,无中间历元解)。
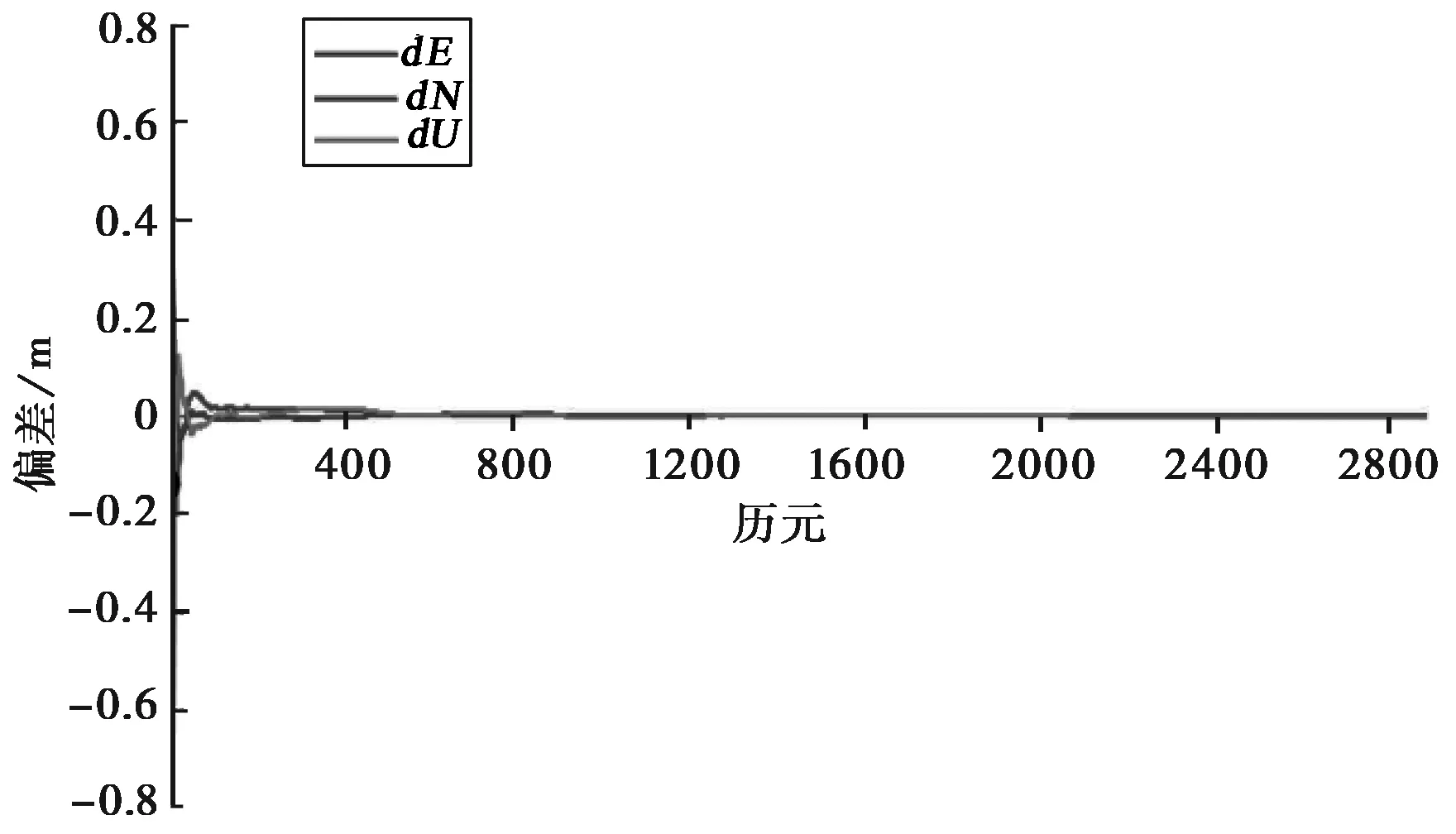
图1 gLAB静态精密单点定位结果的NEU方向误差

图2 CSRS-PPP静态精密单点定位结果的N、E、U方向误差
表2静态精密单点定位结果的N、E、U方向偏差
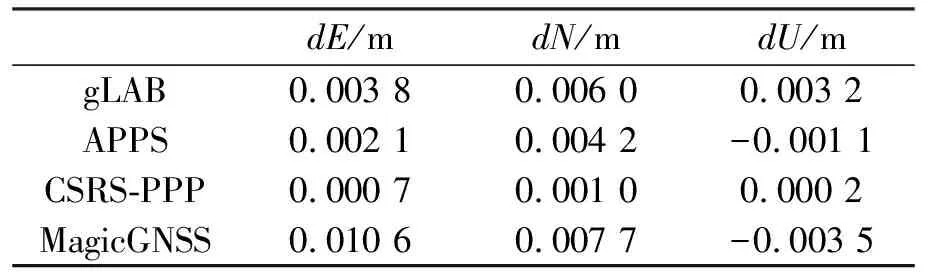
dE/mdN/mdU/mgLAB0.003 80.006 00.003 2APPS0.002 10.004 2-0.001 1CSRS-PPP0.000 70.001 00.000 2MagicGNSS0.010 60.007 7-0.003 5
从图 1、图 2及表 2中可以看出,gLAB、APPS等精密单点定位软件的单天静态解在N、E、U 三个方向的精度均在cm到mm级,除MagicGNSS的处理结果在东方向偏差达到1 cm 左右外,其他解算结果所有方向的误差均优于1 cm.
2.3 动态PPP实验结果分析
由于处理实测的动态数据难以进行有效的验证,本文采用动态的解算模式处理静态的观测数据实现对gLAB动态PPP精度分析。用gLAB、APPS、CSRS-PPP 、MagicGNSS分别计算POL2观测站在2012年11 月30日动态定位结果并与其跟踪站的真实坐标相比较,得到在N、E、U 三个方向上的偏差如图3、图4、图5、图6及表3所示。
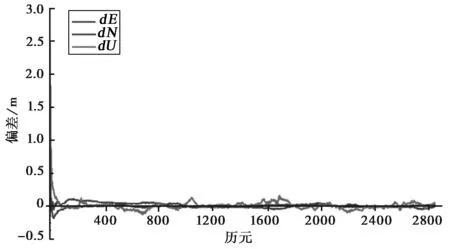
图3 gLAB动态精密单点定位结果与已知坐标在N、E、U方向的差值
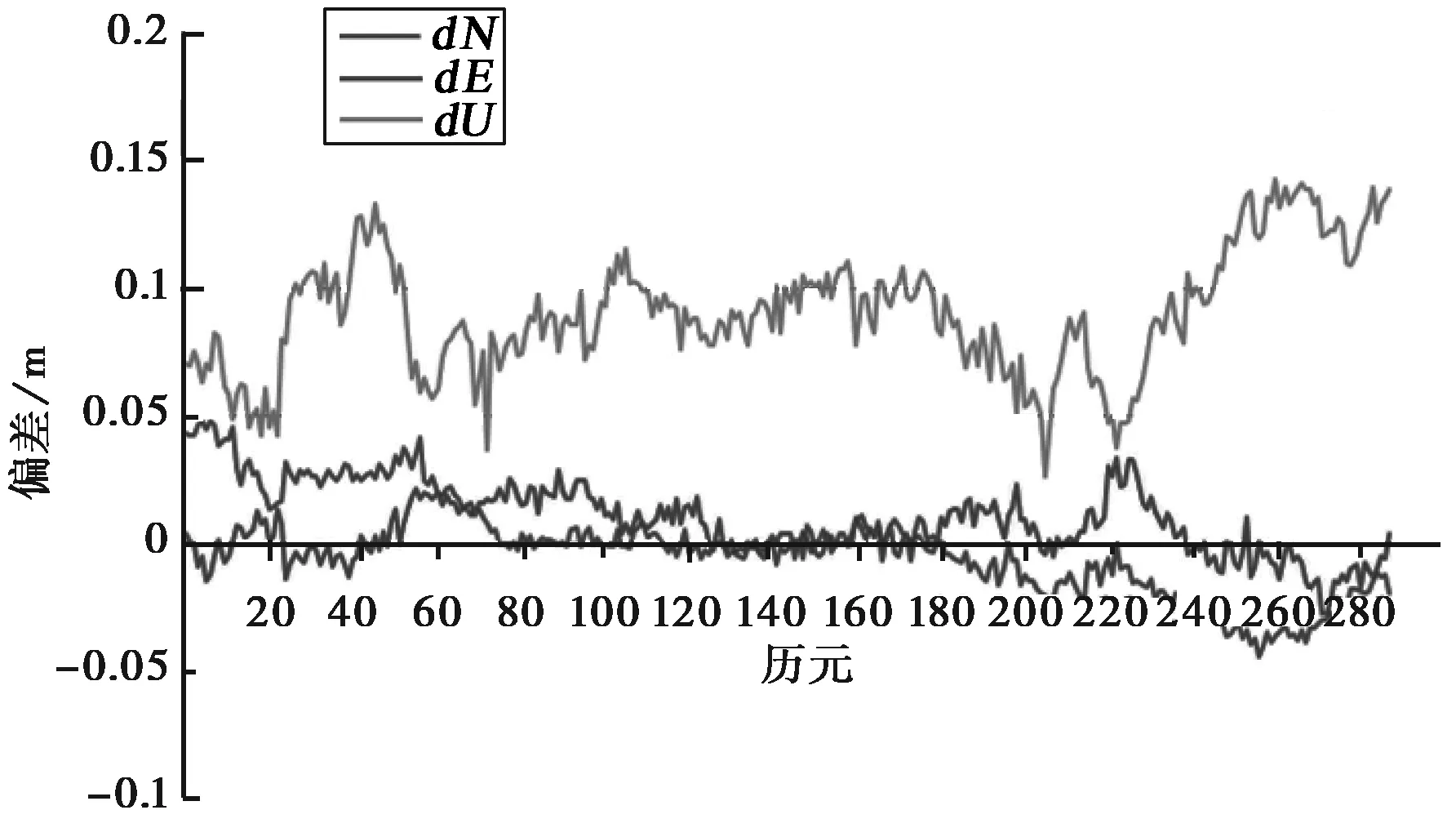
图4 APPS动态精密单点定位结果与已知坐标在N、E、U方向的差值
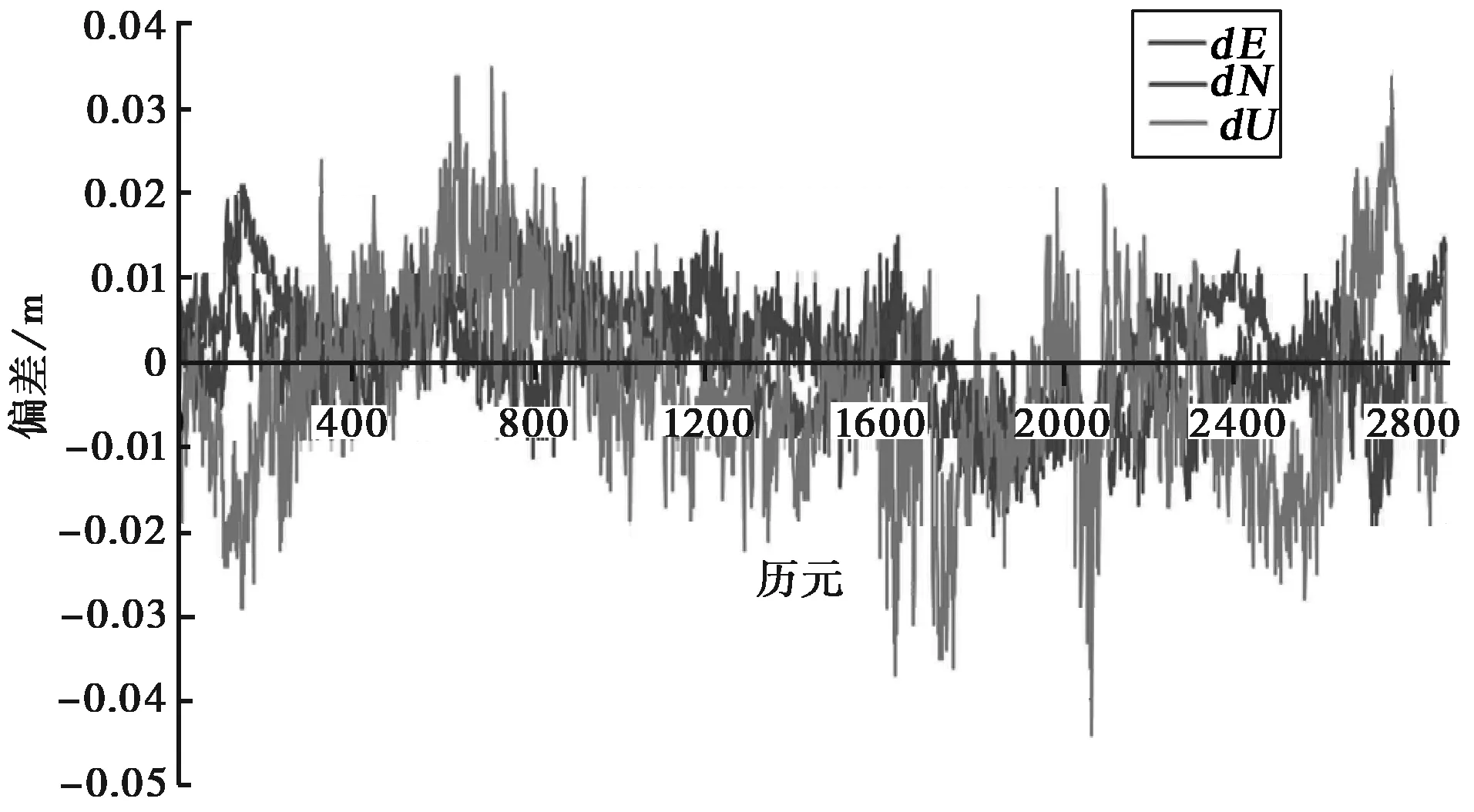
图5 CSRS-PPP动态精密单点定位结果与已知坐标在N、E、U方向的差值
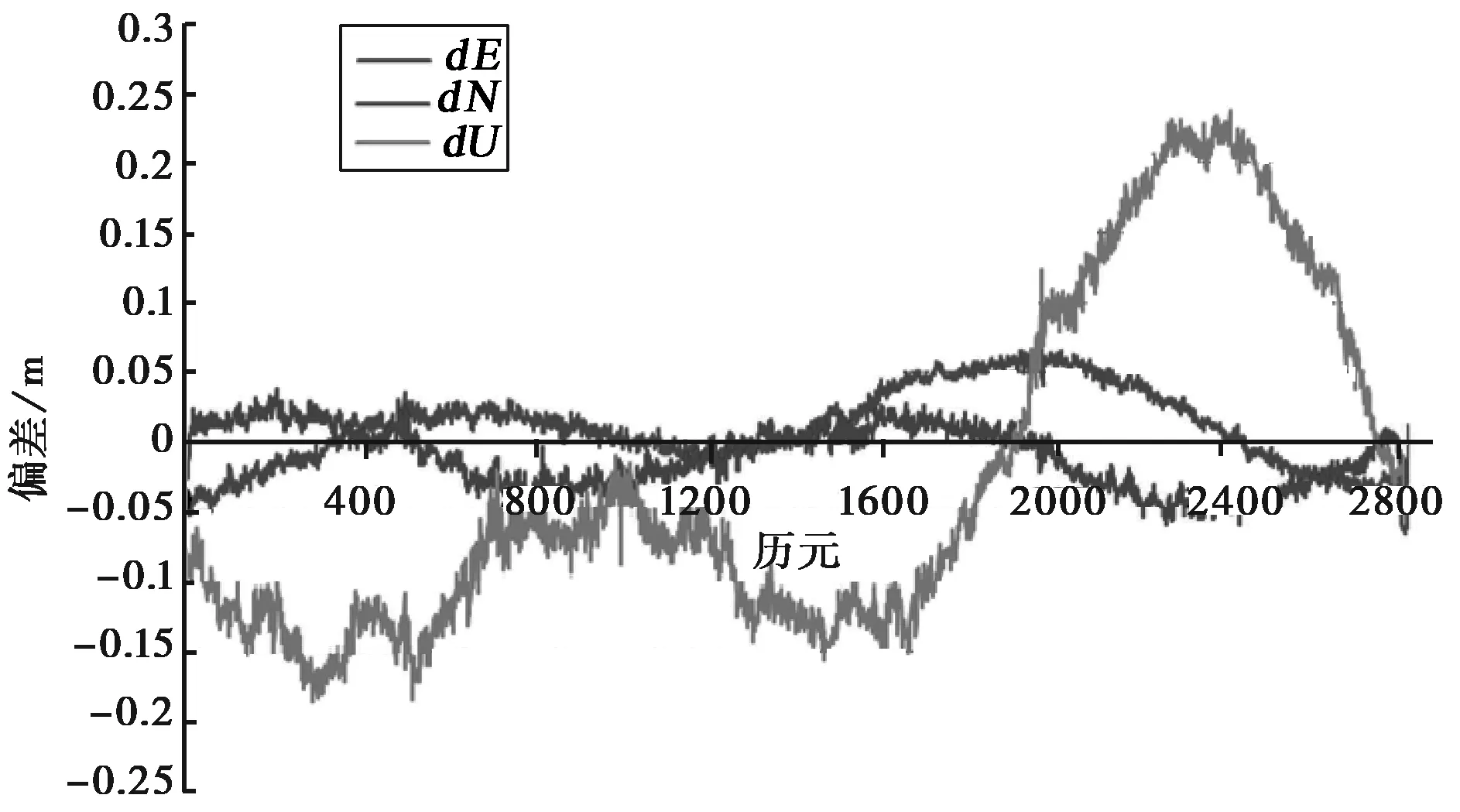
图6 MagicGNSS动态精密单点定位结果与已知坐标在N、E、U方向的差值
表3动态精密单点定位结果的N、E、U方向偏差/m
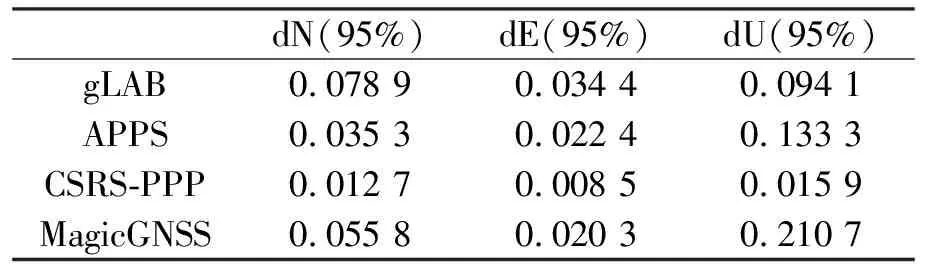
dN(95%)dE(95%)dU(95%)gLAB0.078 90.034 40.094 1APPS0.035 30.022 40.133 3CSRS-PPP0.012 70.008 50.015 9MagicGNSS0.055 80.020 30.210 7
从上述图表可以看出,采用静态模拟动态解算,gLAB、APPS、CSRS-PPP 、MagicGNSS计算的POL2观测站在2012年11月30日精密单点定位误差N、E方向都在10 cm 以内(95%) ;U方向偏差只有APPS和MagicGNSS解算结果大于10 cm,其余解算结果均优于10 cm.
上述动态PPP结果实际上可以作为是一种理想状态下的动态PPP解算。实际情况中,载体的运动相对复杂,观测数据的质量相对静态要低一些,受到周跳、多路径误差的影响也比静态更为严重。因此,上述精度是在比较理想的情况下获得的精度,实际的动态定位精度可能要稍低于上述定位精度。
3 结束语
利用实测数据验证了gLAB软件计算静态和动态精密单点定位的稳定性及可靠性。实验结果表明,开源gLAB精密单点定位软件静态精密单点定位解算结果可达到cm至mm级(95%),动态精密单点定位结果可达到dm至cm级(95%),并且动态精密单点定位结果稳定可靠。
[1] ZUMBERGE, J F Automated GPS data analysis service[J]. GPS Solutions, 1999,2(3): 76.
[2] NATURAL RESOURCES CANADA, On-line Precise Point Positioning how to use document [R]. Canada Centre for Remote Sensing Geodetic Survey, 2004.
[3] RODRIGO F. LEANDRO, MARCELO C.etal. GAPS: The GPS analysis and positioning software-a brief overview [C]//ION GNSS 20th International Technical Meeting of Satellite Division, 2007:25-28.
[4] RAMOS-BOSCH P. GNSS-Lab tool software user manual [R].Research Group of Astronomy & Geomatics Technology University of Catalonia,2011.
[5] 阮仁桂. GPS非差相位精密单点定位研究[D]. 郑州:解放军信息工程大学, 2009.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:24:00
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
山东工业技术(2016年15期)2016-12-01 05:31:14
信息记录材料(2016年4期)2016-03-11 15:22:33
系统医学(2016年8期)2016-02-20 02:55:08
机电信息(2015年9期)2015-02-27 15:55:56
电子设计工程(2015年15期)2015-02-27 12:07:33
