
基于Gamit解算的NNCORS站点CGCS2000坐标的确定方法
2014-08-21 09:50:58韦廖军林仁超
全球定位系统 2014年5期
莫 懦,韦廖军,邓 娟,林仁超
(南宁市勘察测绘地理信息院,广西 南宁 530023)
0 引 言
NNCORS系统由5个连续运行参考站点组成,维持着南宁地区的测量框架和基准,随着CGCS2000大地坐标系的推广,南宁地区正逐渐从以前坐标系过渡到CGCS2000大地坐标系,但NNCORS站点坐标是基于ITRF2005框架,参考历元为瞬时历元;而CGCS2000坐标对应着ITRF1997框架,参考历元为2000.0历元;如何正确求解NNCORS站点的CGCS2000坐标,是南宁市测量工作者关心的一个问题。目前求解方法有两种[1]∶1)基线平差法,即联测南宁地区已知的CGCS2000坐标成果的高级控制点,例如国家的A、B级点;2)框架转换法,利用目前国际上高精度GPS后处理软件解算出当前最新ITRF框架下的坐标,再利用SOPAC网站公布的框架之间的转换参数进行坐标转换,得出CGCS2000坐标。本文分别论述了两种方法,分析两种方法的解算精度,并对两种解算结果进行比较。
1 NNCORS概况
NNCORS系统共有5个连续运行参考站,布设在南宁市及周边地区,设为那楼站、那陈站、七塘站、金陵站和南宁站,站间最长距离69 km,最短距离30 km,平均间距48.6 km,数据处理中心设在南宁市。系统完全覆盖南宁市六城区,全天后向南宁六城区提供高精度、高时空分辨率、高效率、高覆盖率的全球导航卫星系统综合信息服务,维护着南宁地区的测量框架和基准。
2 Gamit软件介绍
GAMIT/GLOBK是美国麻省理工学院(MIT)与斯克里普斯海洋研究所(SIO)共同研发的高精度GPS定位定轨软件,并得到美国哈佛大学和美国国家科学基金会的支持,目前已广泛用于大尺度、高精度GPS定位和地壳形变分析。Gamit解算参数估计采用最小二乘算法,进行双差观测量处理,完全消除了接收机和卫星钟差的影响,削弱了轨道,大气折射等系统性误差,其对于长基线解算精度可达到10-7~10-9量级[2-3]。
3 NNCORS站点CGCS2000坐标的确定
为了分析两种求解结果差异性,本文选取了同一时间段的NNCORS站点数据,采用相同的GAMIT数据处理策略进行基线处理。
南宁地区距离北部湾海岸300多公里,数据处理策略中不考虑海潮模型改正,并从极潮中移去平均值;考虑固体潮改正、依赖于频率的改正、极潮改正,所有数据采用间隔均为30″,并用IGS的精密星历进行逐日处理。
3.1 基线平差法
基线平差法基本思想是将NNCORS站点联测周边具有CGCS2000精确坐标,采用GAMIT软件进行基线处理,再提取GAMIT处理的基线文件,用武汉大学研制的COSAGPS进行平差, 三维约束平差采用具有CGCS2000精确坐标的高级点进行,进而获得NNCORS站点的精确CGCS2000坐标。根据NNCORS站点分布情况,本文选取了8个南宁周边精度指标较好的高级点,与NNCORS站点进行24 h以上的联测。将联测数据采用GAMIT进行基线处理,采用表1的数据处理策略对数据进行处理,数据处理后,查看处理文件中的Q文件中的均方根残差(nrms),nrms是衡量基线解算质量的重要指标之一,nrms值要求小于0.5,如果nrms值大于0.5,则认为数据中有大周跳没有剔除,需要进行重新处理或者使用CVIEW进行人工剔除,本例中nrms=0.187,满足要求。
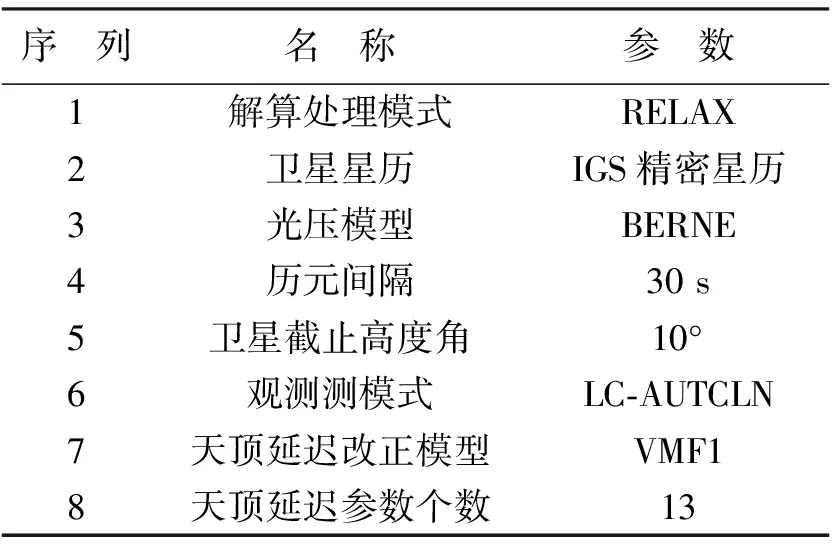
表1 数据处理策略
提取GAMIT处理结果文件中的Q-FILE或者0-FILE基线解算结果文件,GAMIT对基线进行了两次迭代处理,第二次迭代处理的基线数据是平差采用的数据,利用COSAGPS软件对GAMIT处理的基线结果进行网平差,三维约束网平差控制点采用高级点的CGCS2000坐标进行约束,得出NNCORS站点的CGCW2000坐标。网平差解算结果如表2所示。

表2 网平差边长相对精度
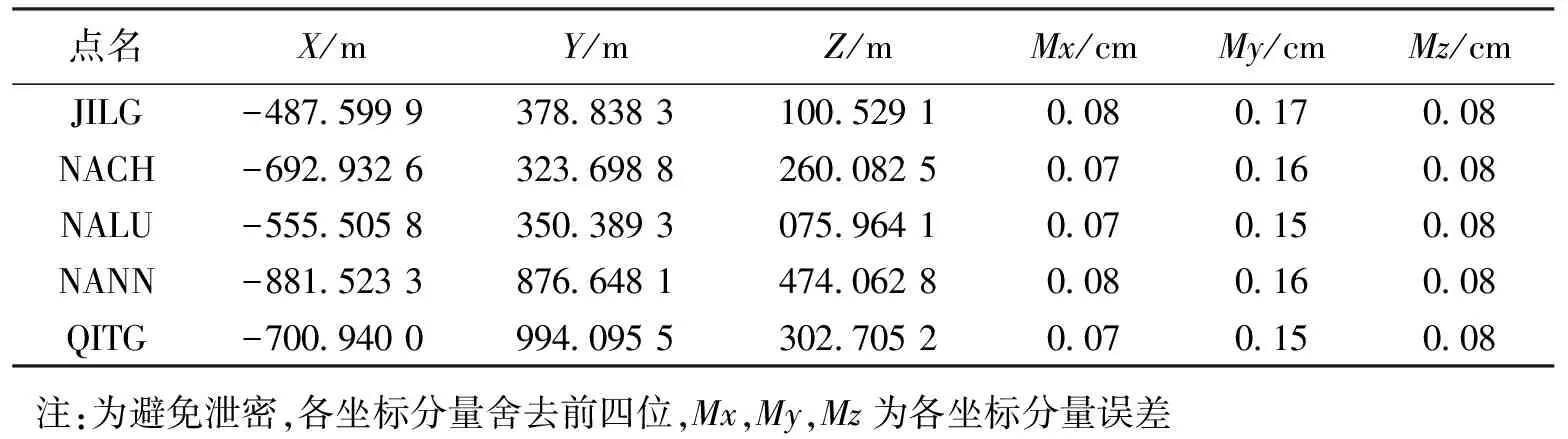
表3 NNCORS站点CGCS2000坐标及精度
限于篇幅,表3只示出了部分边长及最弱边相对精度,其中JZ01-NANN为最弱边,相对精度达到了2.32×10-7,其他边长相对精度均小于此值,坐标量中误差均在毫米级,达到了国家GPS B级网的精度要求。
3.2 框架转换法
ITRF国际地球参考框架是IERS的具体实现,是一个地心四维坐标参考框架,是基于VBVI、LLR、SSR、GPS和DORIS等空间技术所建立起来的,是全球IGS站和速度场的具体实现。目前最新的ITRF框架为ITRF2008参考框架,最新精密星历计算的坐标为ITRF2008框架下的坐标,而CGCS2000对应的框架为ITRF97,Epoch=2 000.0,ITRF2008坐标转换到CGCS2000坐标,实质就是框架之间的转换。然而ITRF2008到ITRF97框架之间没有直接的转换参数,根据ITRF所公布的框架转换参数,可根据ITRF2008与ITRF2000、ITRF2000与ITRF97的转换关系得到。表4示出了ITRF2008与ITRF2000、ITRF2000与ITRF97的转换参数及参数变率。

表4 ITRF2008至各框架转换参数及其速率
表4所列数据为特定历元下的转换参数,而当前求解的ITRF2008框架下的坐标与CGCS2000参考历元跨度达10年以上,需要考虑板块漂移和地壳形变等因素。地球表面的观测点会随时间的推移进行漂移及升降,不同历元基准的坐标应进行历元基准的归算,公式为[4]
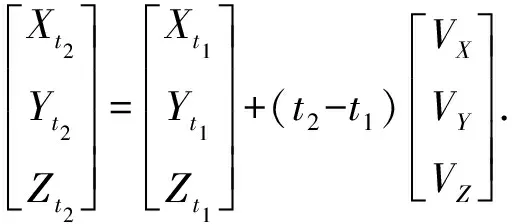
(1)
公式中的IGS测站的速度为年变率。t1为框架历元,t2为需转换到的历元,这里为CGCS2000所在的历元,即2 000.0.为了获取准确的CGCS200精确坐标,必须获得精度为毫米级的点位速度场,而南宁地区目前没有CORS站维持本地区的速度场模型,所以实际操作中南宁地区速度场可以采用加权平均法[5]和NNR-NUVEL-1A板块运动模型[6]所获得,南宁地区上某一点的速度公式可以采用

(2)
选取了2013年,年积日为280,…,289十天的NNCORS站点数据,选取CUSV、PIMO、LHAZ、SHAO、TWTF、BJFS、SUWN的ITRF2008框架下的坐标做约束,采用IGS站精密星历进行处理,处理后得到单天的松弛解,再用GLOBK软件单日解合并,平差得到ITRF2008框架,Ecoph=2 013.781下的精确坐标,单日解水平精度5 mm,垂直精度10 mm.同时根据以上框架转换和历元基准之间的转换关系,编制了程序,计算出了NNCORS的CGCS2000坐标,坐标如表5所示。
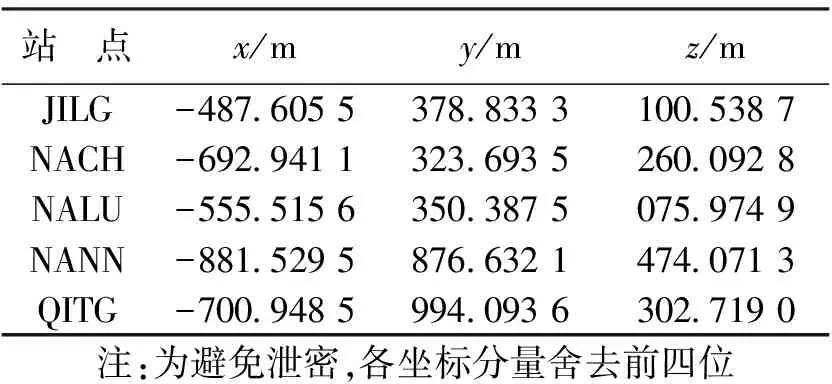
表5 NNCORS CGCS2000坐标
用基线平差法与框架转换法计算出的NNCORS站点的CGCS2000坐标作了比较,比较结果如表6所示,比较结果表明,各站点坐标分量较差大部分都小于1 cm,达到毫米级。最大较差绝对值1.6 cm,最小较差绝对值为0.5 cm.
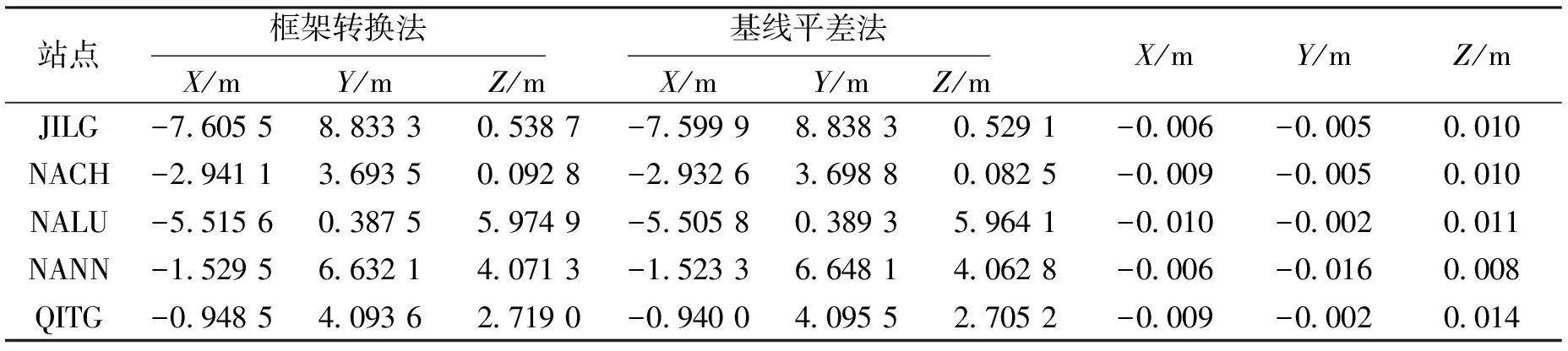
表6 CGCS2000坐标较差
4 结束语
本文阐述的基线平差法和框架转换法计算NNCORS的CGCS2000坐标保持了高度的一致,但在计算过程中需注意以下几个方面:
1)城市CORS站点CGCS2000精确坐标的确定,在国家A、B级坐标点密度分布不均匀的地区框架转换法比基线平差法有优势。
2)IGS站的选取应兼顾平衡性与精度一致性原则;
3)不同框架,不同历元下的坐标转换,其点位速度场起关键性作用,因此需获得转换点的精确速度场,否则会影响转换精度;
4)用基线平差法时,应选择精度高、稳定性好的高级点作为联测点。
[1]成英燕,2000国家大地坐标框架转换方法[R].2009.
[2]李 杰, 王晓强. 应用GAMIT软件进行高精度GPS定位解算[J].内陆地震, 2001, 15 (4): 355-359.
[3]鄂栋臣, 詹必伟, 姜卫平,等. 应用GAMIT/GLOBK软件进行高精度GPS数据处理[J].极地研究,2005, 17 (3): 173-182.
[4]刘 立,成英燕.坐标框架转换若干问题的研究[J].全球定位系统,2010,35(1):20-25.
[5]林晓静,张小红,郭 斐.ITRF2005与CGCS2000坐标转换方法与精度分析[J].大地测量与地球动力学,2010(2):117-120,124.
[6]荣 敏,周 魏.基于ITRF2005的全球版块运动模型[J].海洋测绘,2009(1):1-3
猜你喜欢
高中数理化(2023年8期)2023-09-07 01:07:53
中学生数理化·八年级物理人教版(2022年6期)2022-06-05 06:55:32
中学生数理化·八年级物理人教版(2021年6期)2021-11-22 07:49:48
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
福建基础教育研究(2018年4期)2018-05-02 07:08:11
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
