
基于DVB-T单频网的无线定位方法研究
2014-08-21 08:47:12冯新建
全球定位系统 2014年2期
雷 华,冯新建,贺 信,李 悦
(1.陕西陆军预备役高炮师,陕西 西安 710077;2.中国人民解放军61541部队,北京 100094)
0 引 言
随着人们对基于位置的信息服务需求不断增加,无线电定位技术受到了越来越多的关注。全球导航卫星系统(GNSS)以其广域覆盖的巨大优势,将无线电定位技术发展到了一个新的高度,并在世界范围内得到了广泛应用。然而,由于GNSS信号容易受到遮挡和多径等传播因素的影响,其在城市密集城区和室内封闭区域无法保证定位精度的可靠性和可用性。在这种情况下,可以利用原本不用作导航定位的无线信号(如WLAN、电视台广播基站和移动电话基站传输的信号等),又称作泛在无线信号[1](SoOs),辅助进行无缝定位。
本文所考虑的泛在无线信号是由数字电视地面广播系统(DVB-T)单频网[2]传输的电视广播信号。DVB-T单频网信号在定位功能上具有以下几个优势:首先,所有发射塔位置固定且已知;其次,所有发射机同时同频发送相同的信号,并通过发射机端附加专用设备——数字单频网(SFN)适配器从导航卫星得到基准频率和秒脉冲信号(1 pps)来保证时间和频率的同步[3],从而提供可与GNSS相媲美的精度;第三,由于电视服务对误差概率的要求更高,接收机处的信噪比要远远高于测距需求。
DVB-T系统使用了编码的[4]正交频分复用(OFDM)技术,具有频带利用率高、能实现动态接收、抗多径等优良特性。本文利用DVB-T单频网传输信号中包含的导频子载波通过到达时间(TOA)技术测算伪距,进而定位。由于DVB-T单频网信号的功率比GNSS强,可穿透建筑物,因此一般情况下在其覆盖区域总能接收到几个发射塔发送的同步信号,保证了测距方法的可用性。不过,要使用这些信号进行测距,接收机必须首先区分来自不同发射机的信号。
目前,利用DVB-T信号进行动态定位计算的研究并不多,有文献[5]通过使用一种DVB/GNSS混合型接收机对行车动态场景进行了研究,但没有考虑信号衰减的问题,本文则在其基础上引入了自由空间损耗模型,对基于DVB-T单频网的定位方法进行了研究。
1 DVB-T单频网
单频网是指在一定的地理区域内若干发射机都在同一时间、采用同一频率传送同一信号的同一比特,由于其可靠性强,且频谱效率高,已被广泛应用于数字音视频地面广播中。DVB-T单频网信号频率通常在UHF波段,带宽为8 MHz或者7 MHz,有的地区也使用6 MHz.所发送的信号包含4种类型的子载波,包括连续导频、离散导频、数据和传输参数信令(TPS),导频分布如图1所示。与测距相关的一些主要参数如表1所示。
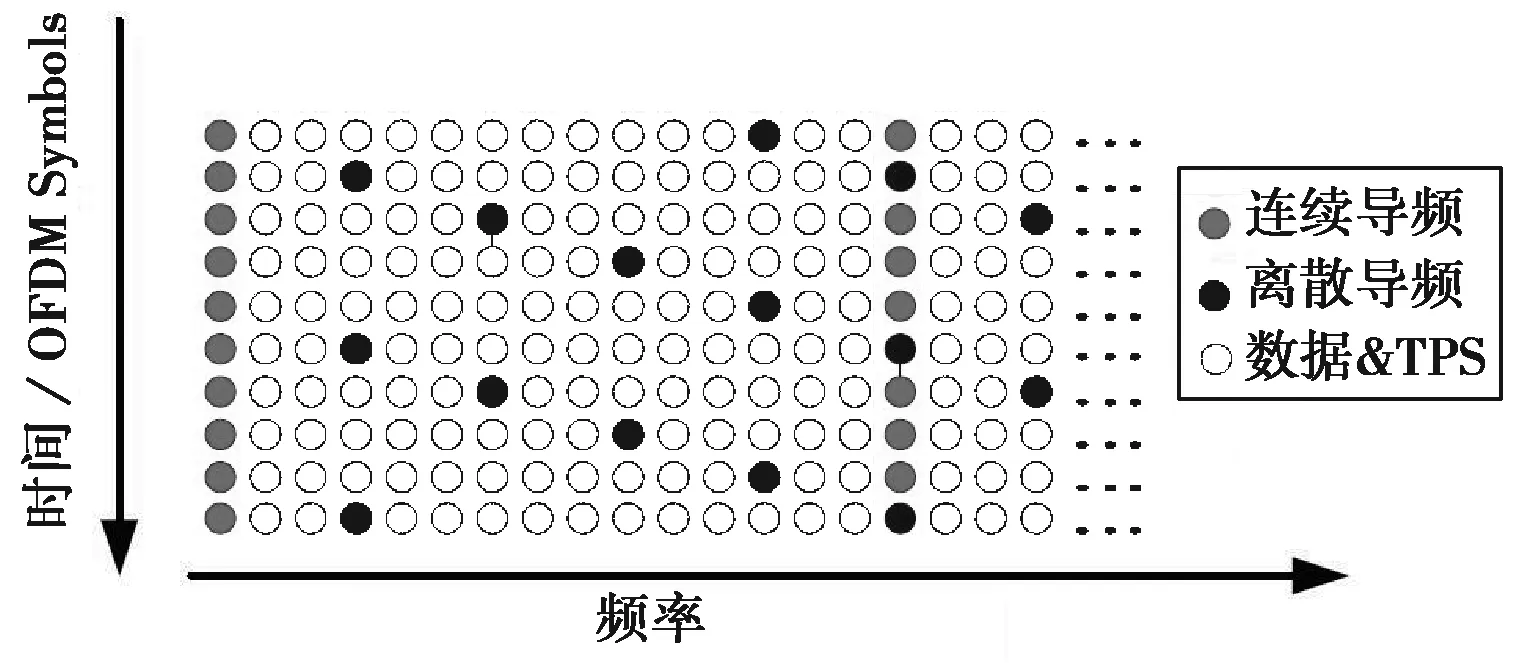
图1 DVB-T导频分布
表1DVB-T参数表
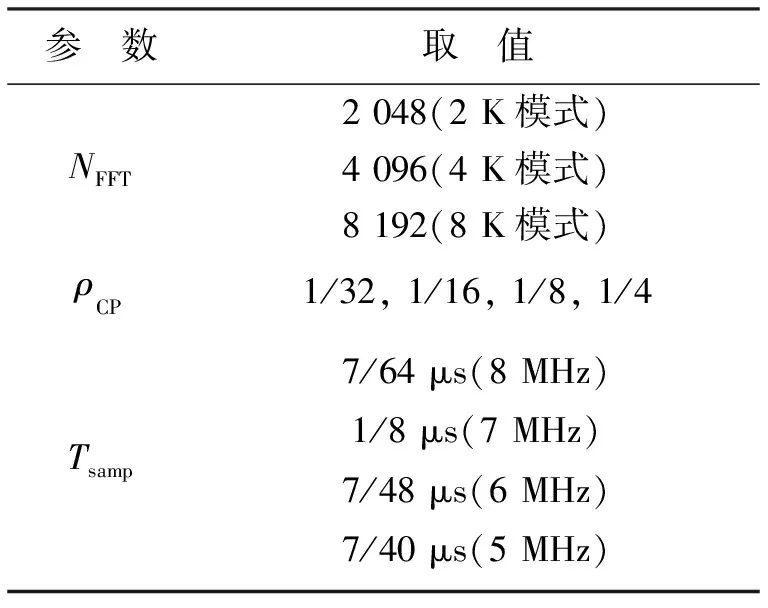
参 数取 值 2 048(2 K模式) NFFT4 096(4 K模式)8 192(8 K模式) ρCP1/32, 1/16, 1/8, 1/4 Tsamp7/64 μs(8 MHz) 1/8 μs(7 MHz)7/48 μs(6 MHz)7/40 μs(5 MHz)
其中,NFFT为子载波个数(即FFT点数),保护间隔比率ρCP=NCP/NFFT,NCP为循环前缀长度,Tsamp为采样周期。
2 基于DVB-T的定位方法
为实现快速定位,需首先进行初始化,选择Ne个有效接收且信噪比最大的DVB-T发射机,并利用GNSS计算此时第i个发射机与PD的距离de,i,以完成发射机的识别和锁定,之后进入DVB模式,利用对SPS(离散导频子载波)信号的时延估计来测量伪距,进而使用三边测量定位法定位,步骤如下:
1)确定一个参考坐标系;
2)确定发射机位置pi=(xi,yi,zi),i=1,…,Ne;
3)测量每个发射机到PD的距离ri;
4)解定位方程组,估算方位。
由于所有发射机(假设自己不发送标识)发送信号都完全一样,需要将每个接收到的DVB-T信号与对应的发射机关联起来,因此在步骤3利用OFDM信号估算伪距之前需要步骤2;步骤4使用EKF(扩展卡尔曼滤波)算法[6]。下文将主要描述步骤2和3.
2.1 初始化
初始化的目的是将距离与发射机位置相关联,从而区分和锁定信号,缩短定位时间。根据接收机当前位置(使用GNSS计算)及各DVB-T发射塔分布位置(可从网上查到预置在PD即定位设备内),计算n时刻第i个发射塔到PD的距离值ri,G[n],同时根据DVB-T信号也可估算出一个距离值ri,D[n].
假设PD在时刻n0进入到了GNSS阻塞区,则可在DVB-T模式下通过使用时刻n0-1时测得的位置作为本地概略位置,明确当前可用DVB-T发射塔号,进行定位。这类似于GNSS定位的热启动模式[7]。
2.2 测距
在AWGN(高斯白噪声)信道中,DVB-T系统可使用基于PN(伪噪声)序列的TOA估计算法,将PD收到的PN序列与本地序列相关(频域),得到时延的最大似然估计(ML),从而测距。这里的PN序列为SPS上调制的伪随机二进制序列(PRBS)。
由于两个连续OFDM符号的SPS位置不同,相关之前需要先识别当前符号SPS位置。不过,由于每隔4个OFDM符号,离散导频的图案重复一次,可将4个连续的OFDM符号组合起来进行相关,以简化接收机的结构,加快粗时延估计,但之后每个OFDM符号仍要进行相关,以获得更精确的估计。
1)理想情况下的相关:在只有一个发射机,信道无噪声,没有多径和频率偏移的理想情况下,相关函数R(m)在m∈Δm时的绝对值可表示为
(1)

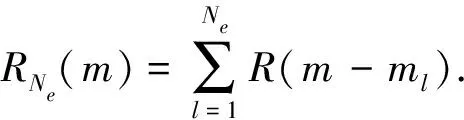
此式可用于估计信号受噪声影响时的未知时延ml,具体分为载波捕获[8]和跟踪两个阶段。
捕获又称粗同步,计算使得相关测量值RM(m)与理想值之间均方误差最小时的时延估计向量

(2)

捕获阶段只能对时延作粗估计,之后使用延迟锁定环(DLL)进入跟踪阶段[6],进行子帧同步和精确伪距测量。
3)相关峰的重新捕获:与GNSS接收机不同的是,本系统中,由于每个子载波只有一个样本,当最大相关峰值由一个时延点跳到另一个时,会丢失跟踪,因此必须增加重新捕获功能。由于PD的运动轨迹是连续的,最大相关峰值只能是从一个时延点跳到两个相邻点之一(取决于对应发射塔距离是增大还是减小),因此只需在这三个点上重新计算相关,再取用新的时延估算值返回跟踪。如果所有相关结果都低于计算阈值,会发生失锁,PD定位过程将从第一步重新开始。
3 实验仿真
本文不考虑海拔,只进行二维平面上的定位(此时2个有效DVB-T信号就足够)。假设在GNSS阻塞区内,4个DVB-T发射机分别位于4个半轴上(E1、E2在x轴,E3、E4在y轴),单频网信号参数如表2 所示,PD初始位置在阻塞区域外,以100 m/s的速度向该区域移动,每0.4 s计算一次其位置坐标。
PD接收到的各发射机信号由DVB-T信号及其对应的相移和衰减合成,并加入了高斯噪声分量。用FFT窗根据PD与发射机间距离移动的相应相位模拟时延,用自由空间损耗模型公式计算信号衰减:
L=20log(f)+20log(d)+32.4,
(3)
式中:L为传播损耗(dB);f为载波频率(MHz);d为PD与发射机之间距离(km).
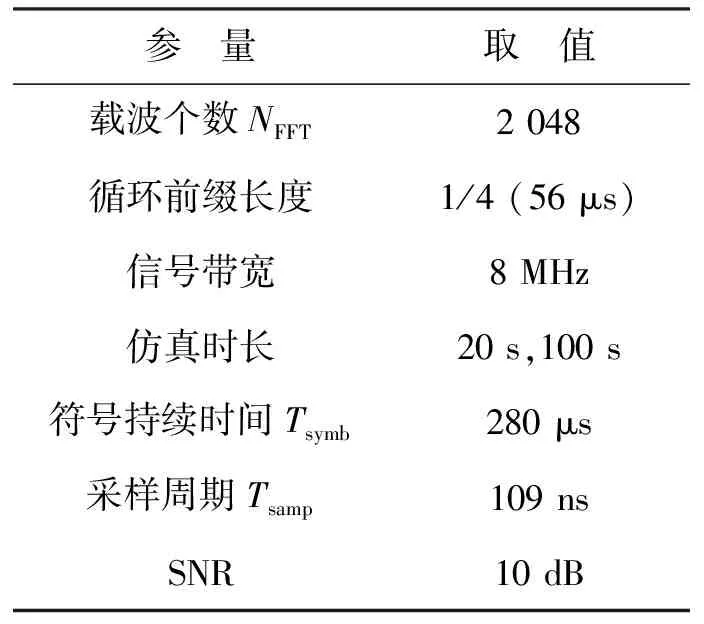
表2 仿真DVB-T信号参数表
假设参考系原点处信噪比为10 dB.由于所有发射机频率相同,信号传输损耗的变化仅与距离有关。根据时延乘光速得距离,伪距估算公式为
rm[n]=rt[n]+εr[n],
(4)
式中:n为用OFDM符号持续时间归一化的离散时间;rm[n]为估算伪距;rt[n]为真实伪距;εr[n]是由噪声引起的测距误差。实验中坐标计算方法如下
Px,m[n]=Px[n]+εx[n],
(5a)
Py,m[n]=Py[n]+εy[n],
(5b)
式中:n为估计时刻;Pi[n](i∈{x,y})为PD在i轴上的真实坐标;Pi,m[n]为相应的估计值;εi[n]为估计误差。总定位误差为

(6)
3.1 没有多径和空间损耗条件下的测试
先不考虑多径和自由空间损耗,且假设E3、E4以原点对称,仿真时长为20 s,计算结果如图2所示。
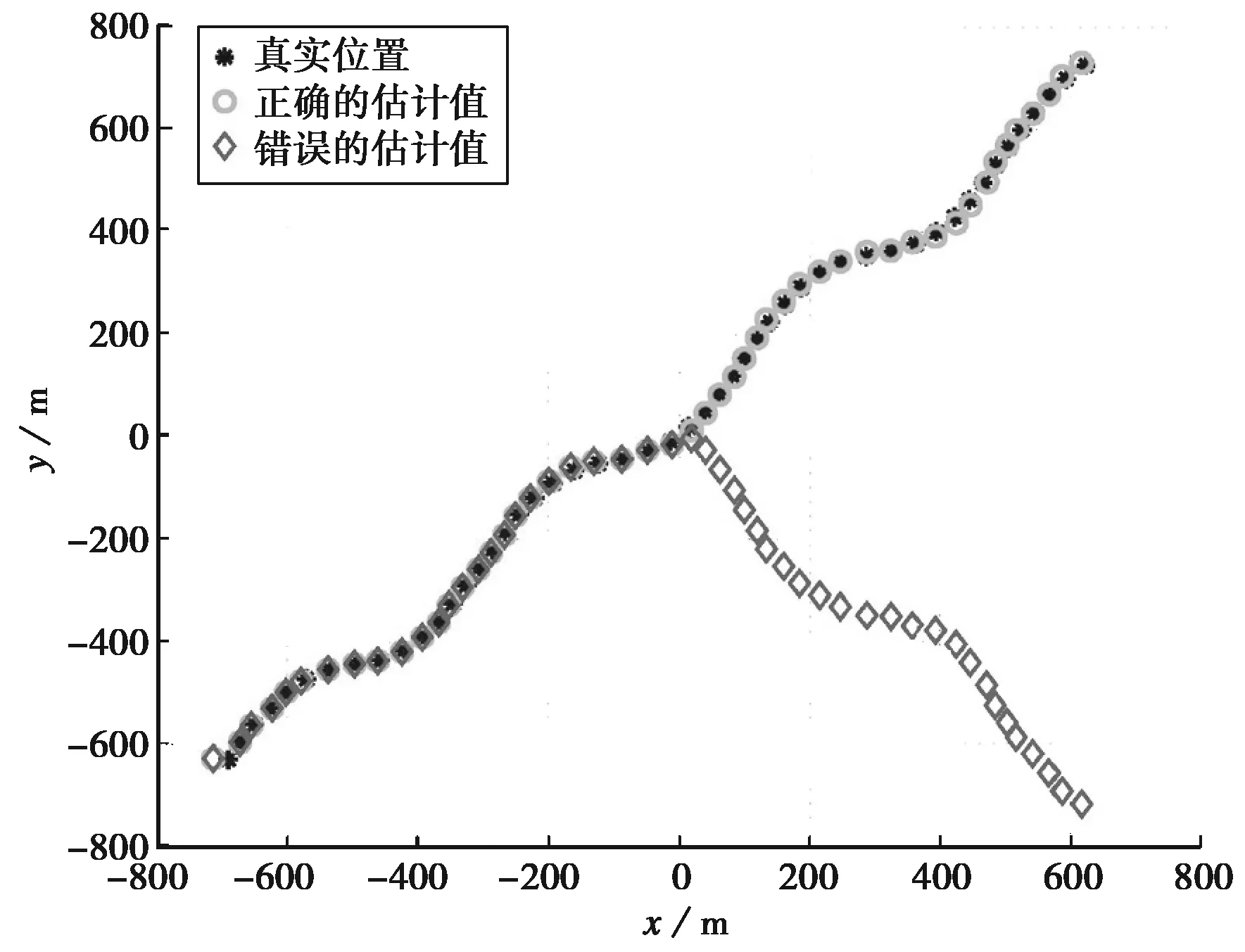
图2 真实轨迹与估计轨迹
图中可以看到两条不同的估计轨迹,圈标记的轨迹始终与真实值相近,红方块标记的轨迹在经过原点后开始与真实位置偏离,这是因为当PD经过原点时,接收到的4个信号中恰有2个传播时间相同(E3、E4),以致可能会出现以下两种情况:
1)PD在经过原点后仍能正确关联信号,估计出正确的轨迹。此时,即使在高动态情况(如100 m/s)下,仿真结果仍表现出了良好的性能,其均方根(RMS)=6.7 m,平均误差6.166 7 m,均方差σp=3.061 2 m,如图2圈标记的轨迹所示。
2)若PD在原点作出错误的信号关联,将E3的信号关联到了E4,E4的信号关联到了E3,估计出的轨迹会大大偏离真实值,如图2方块标记的轨迹所示。
实际情况中由于事先并不知道真实轨迹,在两个或多个接收信号传播时间相近时,需要某些额外信息(如小区标识信息、地图匹配信息、来自其它系统的信息等)来判断正确的轨迹曲线。
3.2 考虑自由空间损耗的测试
现暂不考虑上述信号关联错误的问题,加入自由空间损耗,模拟较大范围信噪比下的定位性能,假设E1、E2、E3、E4坐标分别为(-2 km,0)、(8 km,0)、(0,4 km)、(0,-6 km),模拟时长为100 s。
图3示出了(-2 km,-4 km)处的相关结果,可以看出,4个相关峰值具有不同的振幅,由发射机与PD间距离决定。相关峰值的振幅随着发射机与PD间距的增大而减小,因此,当间距太大,信噪比过低时,发射机信号即使可被检测到,也无法用来测距。
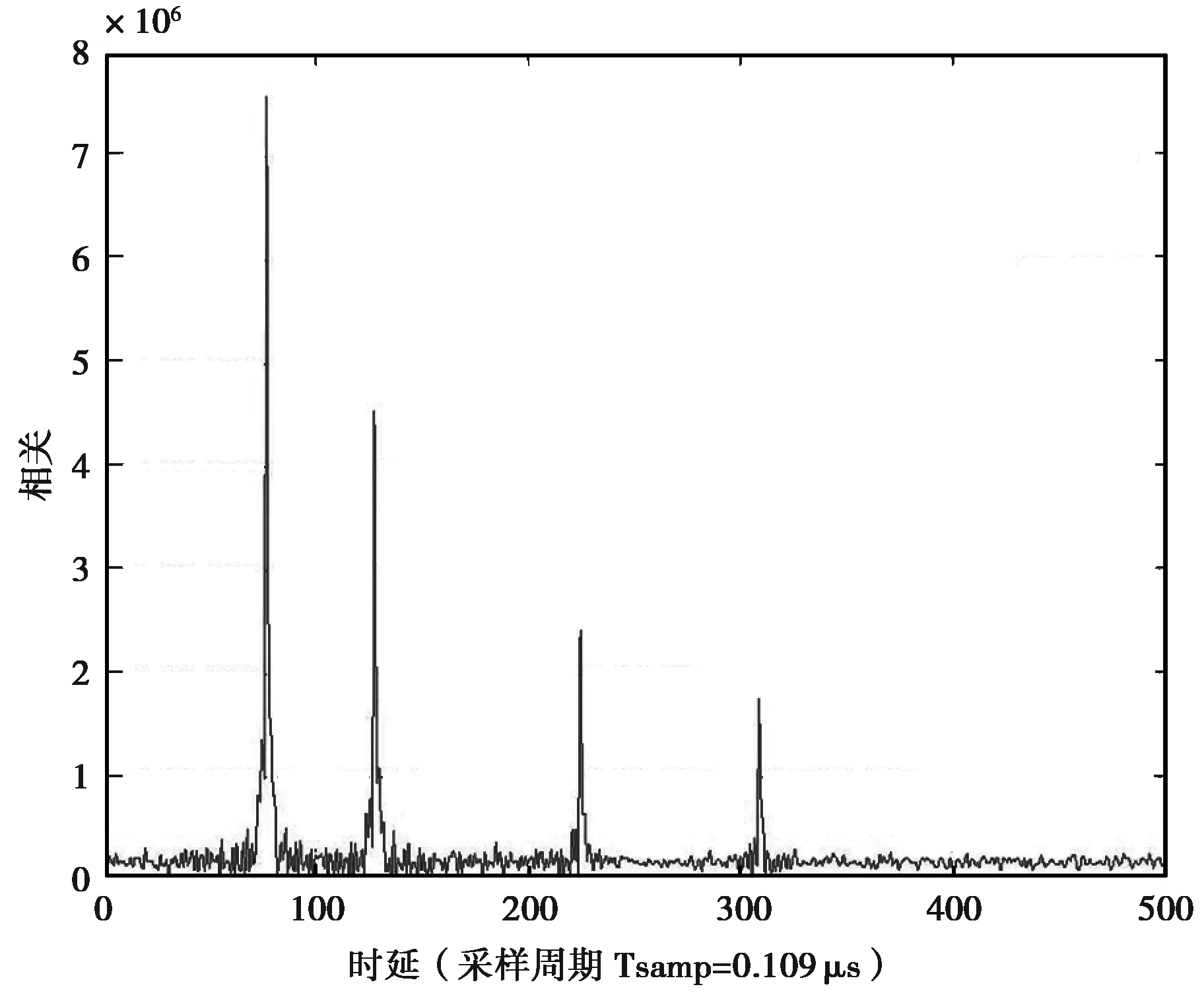
图3 自由空间损耗模型下单点相关结果
图4示出了仿真实验中PD运动轨迹和对应的定位误差ε[n],可以看到定位误差较为平稳,系统定位性能与不考虑自由空间损耗时近似。虽然PD在移动过程中接收到的各发射机信号信噪比在不断变化,但由于采用多信源定位,有些信号的功率沿着路径减小另外一些则增大,因此总体性能保持平稳。
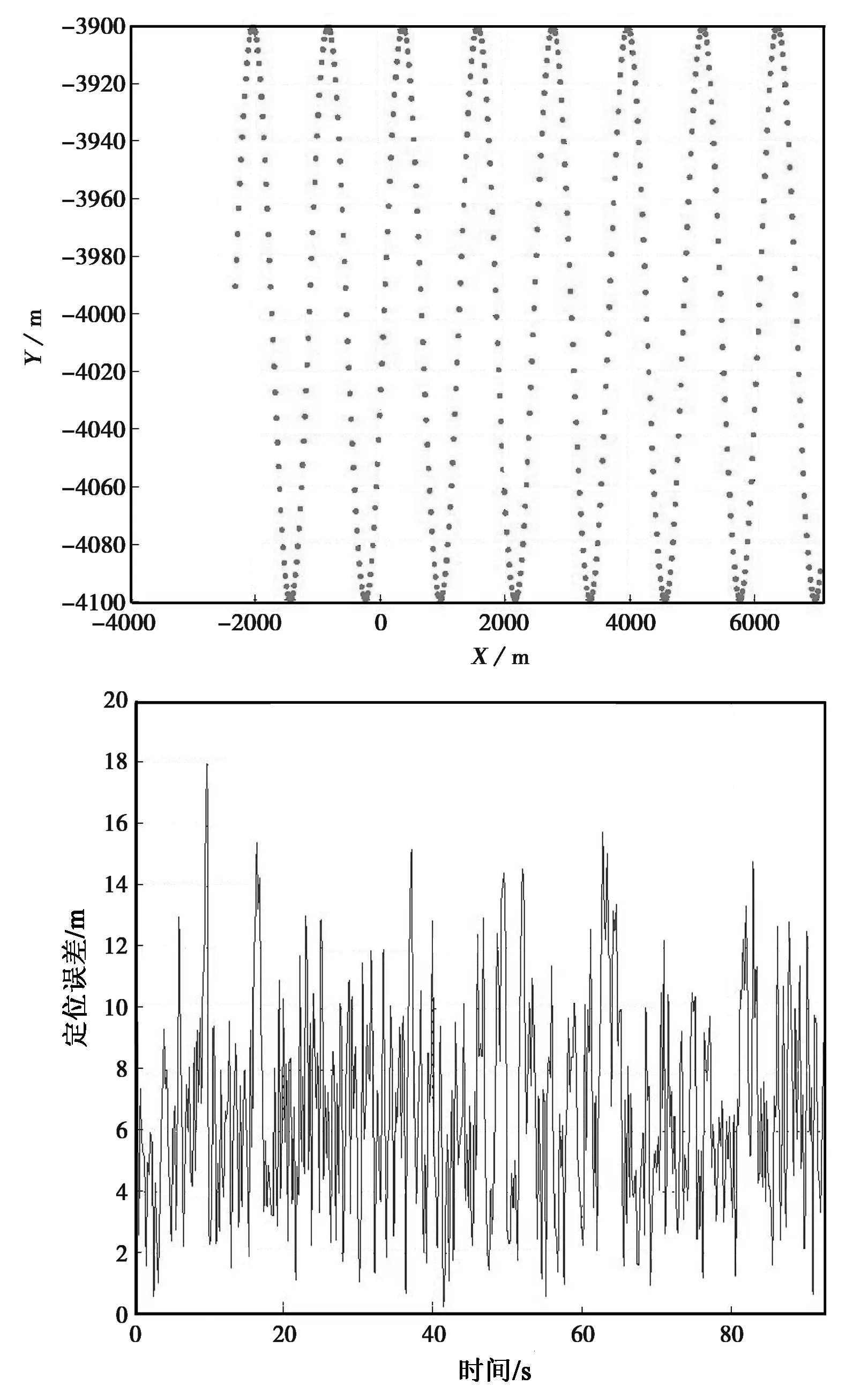
图4 运动轨迹及对应定位误差
4 结束语
本文提出了一种基于DVB-T单频网的定位方法,并在动态场景中进行了模拟仿真,验证了其可行性。实验结果表明:只要用户可以将信号正确关联到发射机,平均定位误差可达到6.1667 m.在自由空间损耗模型下,单个信源测距误差随信噪比而变化,多信源定位误差则保持平稳。在今后的工作中,将考虑多径、多普勒效应、时钟和同步误差对定位的影响,并研究相应的改善技术。
[1]田 辉,夏林元,莫志明,等.泛在无线信号辅助的室内外无缝定位方法与关键技术[J].武汉大学学报,2009,34(11):1372-1376.
[2]欧志坤.移动数字系统的单频网技术[J].西部广播电视,2006(3):9-10.
[3]马宇鹏,樊 丰.DVB-T单频网中同步的实现[J].数字电视与数字视频,2005(10):20-23.
[4]王文博,郑 侃.宽带无线通信OFDM技术[M].人民邮电出版社,2003:7-8.
[5]HUANG J,PRESTI L L.Using two GNSS satellites and few DVB-T signals for positioning in dynamic scenarios.[C]//Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing,(NAVITEC),2012:1-6.
[6]师延山,李道本,范跃祖.无线定位扩展卡尔曼滤波算法的优化[J].北京航空航天大学学报,2003,29(4):308-311.
[7]秦 奋.GPS接收机快速定位技术的研究与应用[D].南京:东南大学,2009.
[8]林宝玺,胡志英.多普勒雷达[M].北京:国防工业出版社,1982.
[9]COTTER S F,RAO B D.Sparse channel estimation via matching pursuit with application to equalization[J].IEEE Trans on Communications,2002,50(3):374-377.
猜你喜欢
科学(2020年3期)2020-01-06 04:02:51
测绘科学与工程(2017年3期)2017-08-16 02:46:08
电子制作(2017年7期)2017-06-05 09:36:13
测绘通报(2016年12期)2017-01-06 03:37:13
导航定位学报(2015年2期)2015-06-05 09:27:38
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
测绘科学与工程(2014年4期)2014-02-27 07:06:08
对联(2011年20期)2011-09-19 06:24:44
对联(2011年10期)2011-09-18 02:35:10
