
北斗卫星导航系统民用单频定位性能分析
2014-08-21 08:58:28申俊飞何海波
全球定位系统 2014年2期
申俊飞,郑 冲,何海波,张 锋
(北京卫星导航中心,北京 100094)
0 引 言
卫星导航系统可提供高精度、全天候、全天时的导航定位服务,已成为国家安全和经济发展不可或缺的信息基础设施。北斗卫星导航系统是我国自主发展、独立运行的卫星导航系统[1,2],由5颗GEO卫星、5颗IGSO卫星和4颗MEO卫星组成,于2012年12月27日正式开通,为亚太地区用户提供导航定位服务。
国内许多学者对北斗卫星导航系统基本星座(3GEO+3IGSO)、区域(5GEO+5IGSO+4MEO)和全球星座条件下中国不同地区的DOP值、覆盖区域和定位精度等性能进行了仿真分析[3-11];以及对GNSS系统中的星座构形贡献和定位性能也进行了融合仿真研究。基于我国内陆均匀分布的9个试验点的B1I民用频点实测数据,对PDOP值、可见卫星数进行统计分析,同时对定位精度及可用性和连续性进行评估,为北斗系统在各行业的应用推广提供参考。
1 评估方法
针对北斗导航接收机在各地区采集的B1I观测数据,对各地区PDOP值、定位精度、可用性、连续性等进行统计。DOP值统计参考部分文献[12]和[13],这里仅对定位精度及可用性和连续性进行说明。
1.1 定位精度
定位精度指系统服务提供给用户的位置与用户实际位置之差(包含水平定位精度、高程定位精度),取定位误差的95%,具体统计方法如下。

1.2 可用性[14,16]
主要考核系统能为用户提供满足定位精度需求的时间百分比。定位精度可用性按照下式计算
(1)
式中:tstart和tend分别为一组测试数据的起始和结束历元时刻;inc为数据采样间隔;T为固定的历元时间间隔,通常为1 s;如果当前历元t的定位精度满足对应要求(水平定位精度≤15 m,高程定位精度≤15 m),则Bool(t)=1,否则Bool(t)=0.
测试中,采集了不同时段、不同地点的定位测试数据m组,每组数据对应的历元数分别为n1,n2,…,nm,每组数据计算的可用性分别为P1,P2,…,Pm.利用m数据统计系统定位精度的可用性为
(2)
1.3 连续性[15-16]
主要考核在规定的时间Top内按照规定的定位精度要求完成其功能的概率。定位精度的连续性按照下式计算:
(3)
式中:tstart和tend分别为一组测试数据的起始和结束历元时刻;inc为数据采样间隔;T为固定的历元时间间隔,通常为1 s;如果当前历元t的定位精度满足对应要求(水平定位精度≤15 m,高程定位精度≤15 m),则Bool(t)=1,否则Bool(t)=0.
测试中,采集了不同时段、不同地点的定位测试数据m组,每组数据对应的历元数分别为n1,n2,…nm,每组数据计算的连续性概率分别为P1,P2,…,Pm,利用组测试数据统计系统定位精度的连续性为
(4)
2 试验评估分析
2.1 试验情况
在北京、三亚、汕头、拉萨、宁波、成都、乌鲁木齐、哈尔滨、青岛等九个地区同步开展了静态定位试验,如图1所示。试验设备为北斗B1I导航接收机,架设在开阔空旷的已知点上。观测时间为2012年12月1日至12月8日,接收机卫星截止高度角为5°,数据采样间隔1 s,记录接收机所有历元定位结果及原始观测数据信息。
图1 试验地区分布
2.2 评估分析
根据记录的星历信息,仿真分析了当前系统覆盖区域内观测时段的PDOP值(95%)分布,结果如图2所示,并根据试验期间接收机输出的所有结果对可用卫星数和PDOP值(置信度95%)进行统计,结果如表1、表2所示。
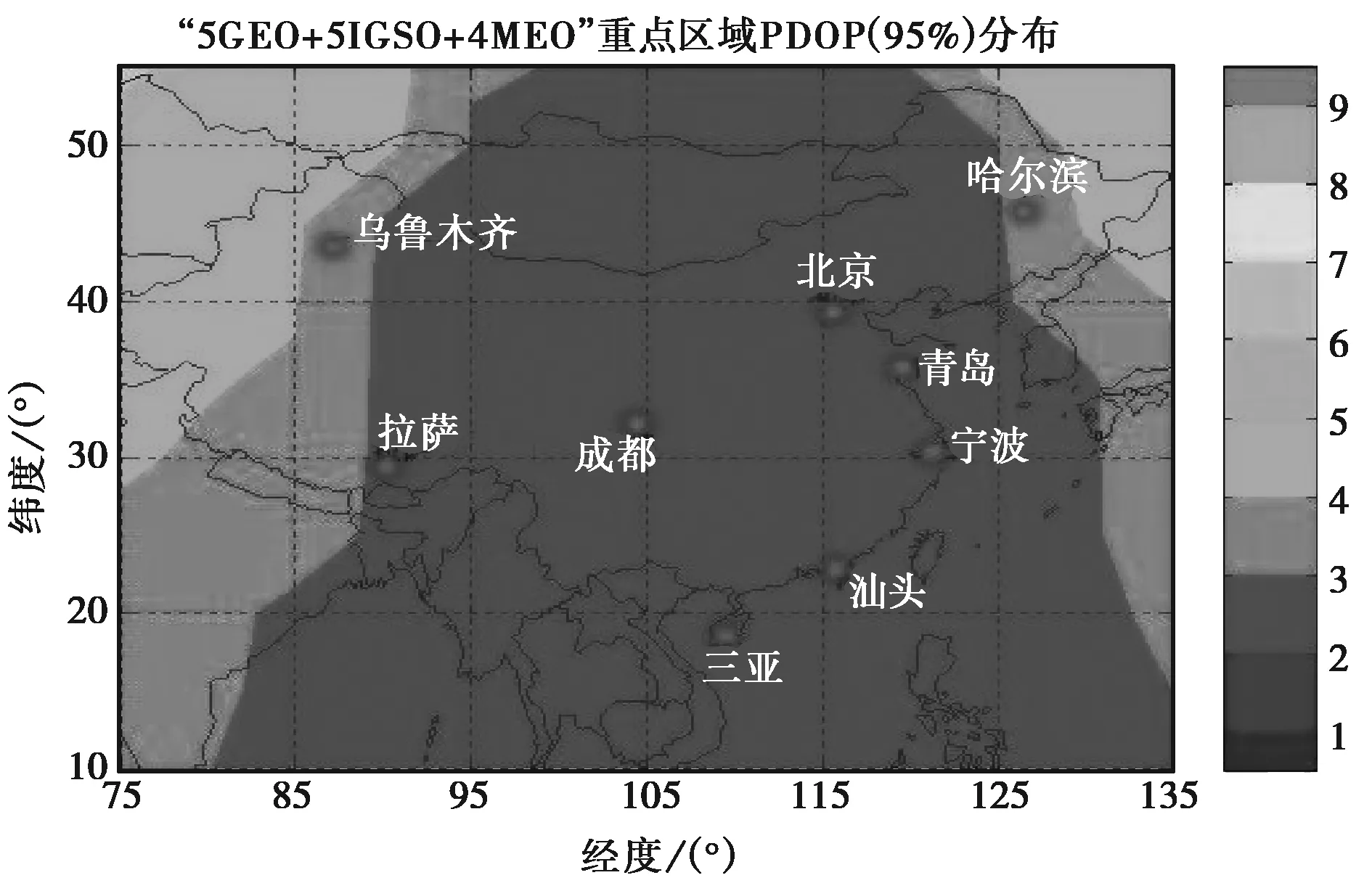
图2 系统覆盖区域PDOP值(95%)分布
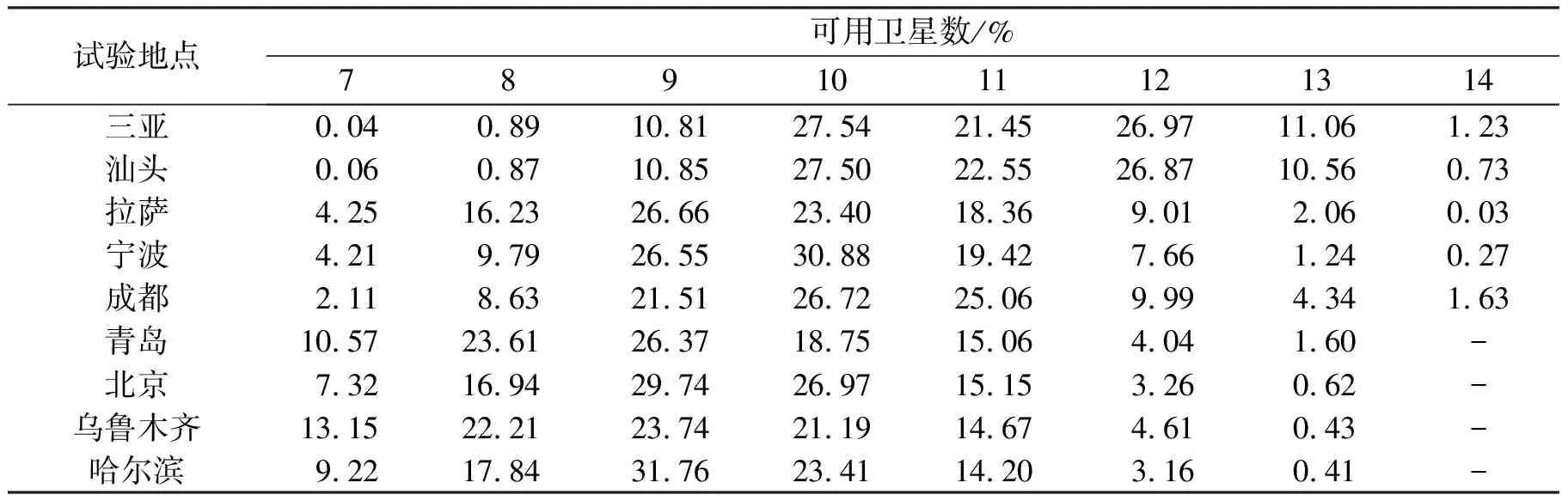
表1 试验地区可用卫星数统计

表2 试验地区PDOP值(95%)统计
从图2和表1及表2试验统计结果可看出,在当前星座条件下,国内区域的可见卫星数至少在7颗以上,国内区域PDOP(95%)优于4.
对试验地区的定位精度、可用性和连续性统计。结果如表3所示。
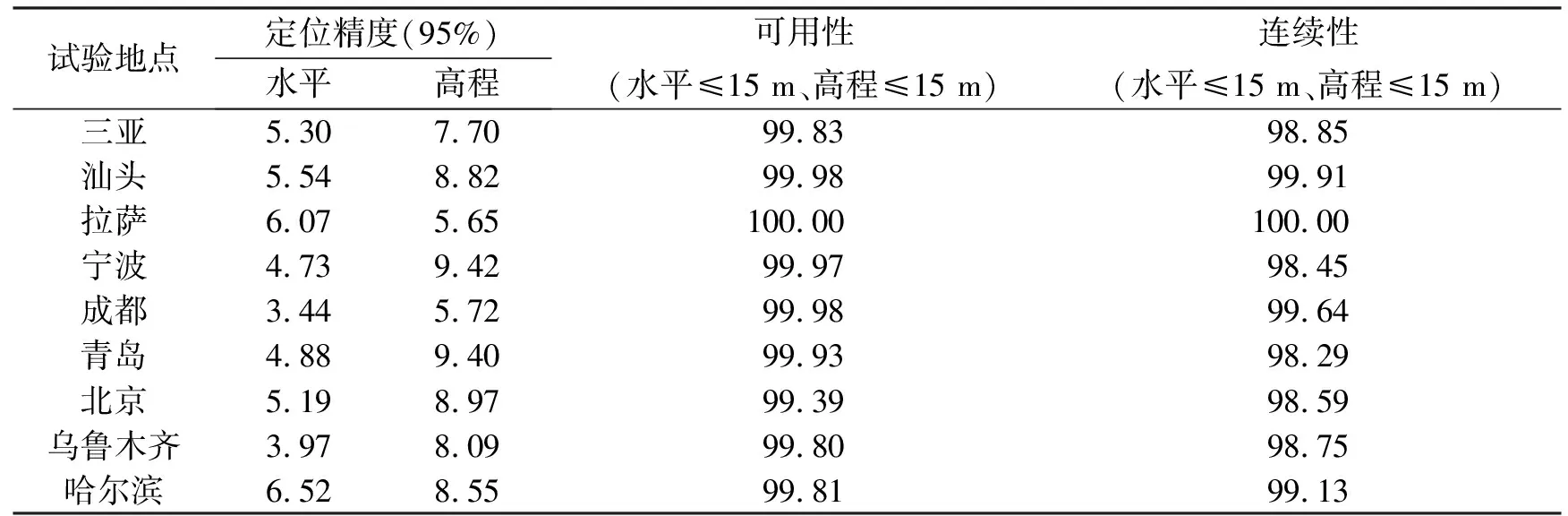
表3 定位精度、可用性和连续性统计
从表3中结果可以看出,各试验地区水平定位精度(95%)优于7 m ,高程定位精度优于10 m;在“水平定位精度≤15 m、高程定位精度≤15 m”的指标要求下,B1I单频定位精度可用性均在99%以上,连续性在98%以上。
3 结 论
在“5GEO+5IGSO+4MEO”星座条件下,综合北斗导航接收机静态定位试验数据统计和分析结果,可以得出以下结论:
1)北斗卫星导航系统工作正常,性能稳定,可以满足广大北斗用户导航定位需求;
2)国内各地区可见卫星至少在7颗以上,PDOP值(95%)优于4;
3)在国内各地区,民用单频(B1I)定位精度(95%),水平优于7 m,高程优于10 m;
4)在“水平定位精度≤15 m、高程定位精度≤15 m”的条件下,民用单频定位精度的可用性达到99%以上,连续性达到98%以上。
[1]谭述森.卫星导航定位工程[M].北京:国防工业出版社,2007.
[2]杨元喜.北斗卫星导航系统的进展、贡献与挑战[J].测绘学报,2010(39):1-6.
[3]翟 桅,张国柱,雍少为.基本星座下北斗卫星导航系统服务性能分析[J].全球定位系统,2011,36(4):56-60.
[4]庞春雷,赵修斌,卢艳娥,等.COMPASS /GPS双模导航定位精度分析及仿真[J].现代防御技术,2011(4):35-39.
[5]杨元喜,李金龙,徐君毅,等.中国北斗卫星导航系统对全球PNT用户的贡献[J].科学通报,2011,56(21):1734-1740.
[6]杨鑫春,李征航,吴 云.北斗卫星导航系统的星座及XPL性能分析[J].测绘学报,2011,40(增):69-72.
[7]曾庆化,刘建业,胡倩倩.北斗系统及GNSS 多星座组合导航性能研究[J].全球定位系统,2011,36(1):53-57.
[8]郝晓光.中国二代卫星导航系统设计覆盖范围的探讨[J].大地测量与地球动力学,2007,27(1):119-122.
[9]刘根友,郝晓光,陈晓峰,等.对我国二代卫星导航系统覆盖范围向北扩展星座方案的探讨[J].大地测量与地球动力学,2007,27(5):115-118.
[10]陆文庆,潘成胜.区域性覆盖的卫星轨道和星座设计[J].火力与指挥控制,2007,32(1):73-78.
[11]邓长明.一种区域卫星定位系统的星座方案[J].电子科技大学学报,2006,35(5):725-728.
[12]刘基余,李征航,王跃虎.全球定位系统原理及其应用[M].北京:测绘出版社,1995.
[13]谢 钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[14]EUROPEAN SPACE AGENCY.GSSF operations manual,volume 1,GSSFP2.OM.001,issue 2 rev.1 [R].GSSF Team,2004.
[15]GSSF TEAM.GSSF operations manual,volume 2,algorithms and models,GSSFP2.OM.002,issue 3 rev.1 [R].2004.
[16]张晓红,周鸿伟,李 群.卫星导航系统精度试验分析的设计与实现[J].系统仿真学报,2010,22(9):2206-2210.
猜你喜欢
包装工程(2023年24期)2023-12-27 09:18:26
海洋信息技术与应用(2021年1期)2021-06-11 01:20:34
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:34
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
新世纪智能(语文备考)(2019年12期)2020-01-13 06:04:26
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
厦门理工学院学报(2016年1期)2016-12-01 04:50:51
中学生数理化·七年级数学人教版(2016年4期)2016-11-19 08:41:24
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
World Journal of Integrated Traditional and Western Medicine(2016年2期)2016-03-14 23:06:38
