
基于物联网技术的智能导盲犬的设计与实现
2014-08-16 09:10:11宋劲松辛政华胡良益
宿州学院学报 2014年7期
宋劲松,辛政华,胡良益,刘 兵
1.宿州市广播电视台,安徽宿州,234000;2.宿州学院,安徽宿州,234000
基于物联网技术的智能导盲犬的设计与实现
宋劲松1,辛政华2,胡良益2,刘 兵2
1.宿州市广播电视台,安徽宿州,234000;2.宿州学院,安徽宿州,234000
基于CC2530和Zigbee协议,实现了子节点与协调器以及协调器与子节点的相互通信。超声波传感器节点以及温湿度传感器节点等可以发出控制信息至协调器,协调器对控制信息进行解析,然后按照指令控制相应的各个其他的传感器节点协调地工作;改变了由上位机应用层发出信息控制消息的发送与接收,实现了控制地自动化;实现了智能导盲犬的雏形,有一定的实用价值。
CC2530;智能导盲犬;ZigBee协议;mesh网络
为方便盲人出行,导盲犬被训练出来,能识别“过来”“走”“停”等简单指令,这在一定程度上给盲人的出行与生活带来诸多便利。但是,导盲犬的训练时间长达18个月,综合训练费用可高达3万美元,超出了普通人的消费承受能力[1]。因此,基于物联网技术的智能导盲犬的研发引起了人们的关注。物联网是一个基于互联网、传统电信网等信息载体,让所有能够被独立寻址的普通物理对象实现互通互联的网络。它正和云计算一起成为当前研究的热点。智能导盲犬系统的设计是物联网应用领域中又一个新的方向[2]。
1 智能导盲犬的总体架构
实现智能导盲犬系统集成了基于CC2530的协调器、超声波模块、酒精模块、温湿度模块、电机模块、语音模块、网关模块和GPRS模块[3-4],为协助盲人和老年人出行提供一种解决方案,也可以应用到医疗和社会服务等领域中。
智能导盲犬功能的实现是通过各个传感器节点的相互协调、无线信号的发送与接收,然后由协调器处理数据并交由相应模块处理。当电源打开时,协调器上的继电器1就处于闭合状态,智能导盲犬前进。通过超声波测得前方障碍物,然后通过无线信号发送信号,协调器接收超声波模块发来的信号,触发继电器2的打开,并且关闭继电器1,智能导盲犬后退。通过时间延迟,小车后退一段距离后,继电器1闭合,开始转弯并且调用语音模块,继电器2关闭,这时前轮的电路导通,小车前进,转弯并语音提示。当小车转过弯道后,直线前进,当遇到障碍物时重复上述步骤。
在智能导盲犬的工作中,温湿度、光敏模块与协调器一直处于通信中,当测得温度过高时,协调器采集到信号,调用蜂鸣器,发出警报。当测得湿度高于一定值时,发出下雨警报。通过采集光度,判断路况。
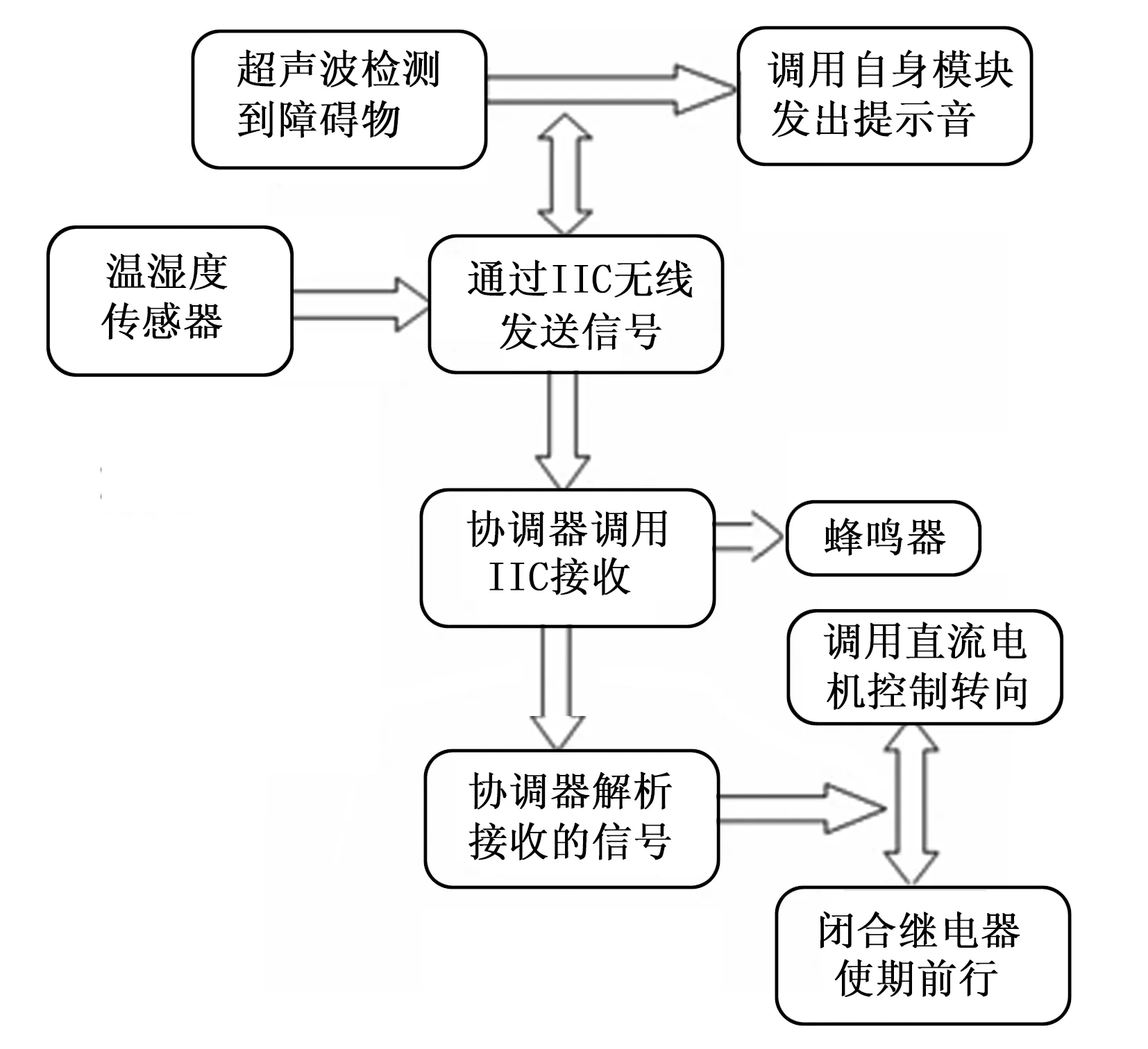
图1 智能导盲系统原理图
本系统采用北京奥尔斯电子科技有限公司的协调器模块与无线节点模块作为基本的器件,智能导盲犬的整个系统如图1所示。
2 智能导盲犬的实现原理
首先智能导盲犬通电系统初始化,接着协调器发起一次自组Mesh网网络,并持续监视是否有节点加入或离开。本系统的自组网的网络容量包含1个网关、1个协调器、0~6个终端节点;无线Mesh网络终端节点寻找并加入网络;终端节点加入网络后,按照协调器的要求,发送本地传感器信号和状态信号(温度、超声波测得的距离、湿度、光敏度)。每节点数据每0.5秒更新一次。协调器将无线网络中采集到的信号进行解析,发送给网络中相应的节点。终端节点发出特殊信号,并告知协调器停止网络数据采集,协调器将停止整个无线网络的工作[5]。
3 智能导盲犬设计方案
3.1 基于Z-Stack MESH网的软件设计特点
导盲犬的设计遵循模块独立化、信号统一化。各节点不需要任何有线连接,采用Z-Stack MESH网组网,通过无线传感节点相互通信。所有信号处理转发是协调器模块的主要功能。 本系统在Zigbee协议的基础上,为了采用无线传感器的mesh 网络,自定义了一种通信结构体,完成多点到多点的网络拓扑结构。各传感器网络节点通过其他相邻网络节点,以无线多跳方式相连。当协调器作为mesh 路由器时,超声波传感器、温湿度传感器、酒精传感器(在其上开发了电机模块)、语音模块等作为mesh终端。
Mesh路由器除了具有传统的无线路由器的网关/中继功能外,还具有支持mesh网络互连的路由功能。Mesh路由器通常具有多个无线接口,这些无线接口可以基于相同的无线接入技术构建,也可以基于不同的无线接入技术,系统可扩展新的终端。无线mesh路由器可以通过无线多跳通信,以低得多的发射功率获得同样的无线覆盖范围。在无线mesh网络中,由mesh 路由器互连构成无线骨干网,这个无线骨干网再通过其中的网关mesh路由器与外部网络如Internet相连。
Mesh终端也具有一定的mesh网络互连和分组转发功能,但是一般不具有网关桥接功能。主要设计方法是在工程下的DemoSensor.c文件中的用户任务事件处理函数zb_HandleOsalEvent的函数体中直接调用IICControlSensor的,参数表为IICControlSensor (2,150,resCode_Ultrasonic)。以下以协调器和超声波传感器编码为例,简要说明软件实现的过程。
3.2 协调器编码实现
ZigBee PRO中的子工程CollectorEB-PRO是协调器硬件的初始化和收发功能模块的实现程序,主要针对协调器上对超声波传感节点信息接收处理函数zb_ReceiveDataIndication进行相应的代码编写,实现对采集到的信息进行处理,通过调用相关函数实现预定的功能。
当协调器模块启动后,各子模块节点和协调器构成无线mesh局域网。当协调器接收到超声波发来的信号后,生成系统新定义的消息结构体,便调用zb_ReceiveDataIndication函数来处理,并通过“If…else…”语句调用相关函数。
3.3 超声波节点模块编码实现
超声波模块编码和协调器编码是同一个ZigBee PRO中的子工程SensorEB-EndDevice-PRO,是超声波节点硬件的初始化和信号采集发送功能实现的模块。超声波传感节点信息采集函数IICControlSensor的调用和发送函数,调用生成的新定义的含有控制信息的消息结构体,通过调用发送函数sendReport将消息发送给协调器模块。
编写超声波模块和分析相应的代码时,IICControl Sensor中包涵很多节点的信号采集。在这一部分代码中,不仅能实现系统的基本初始化,它还与应用层函数建立了对应关系。
4 智能导盲犬系统测试
首先将组装完成的导盲犬开启电源并放在平整的模拟盲道上(前方50 cm处设有障碍物),启动导盲犬前行,当导盲犬前行到离障碍物20 cm处时,超声波检测到障碍物,并调用语音设备提示即将转弯。同时超声波发送无线信号,协调器端接收到无线信号,并解析调用电机和继电器等控制导盲犬的转向过程。由于本系统中CC2530超声波传感器仅能探测到40 cm左右距离的障碍物,此距离远远不够导盲犬转向的需要,故先让其后退20 cm后再前行转向(图2)。

图2 行进中的智能导盲犬
5 结束语
本系统利用超声波测距,探测前方障碍物,一旦发现前方有障碍物,即调用提示音模块,同时调用IIC以无线方式发送信号;协调器接受无线信号并解释,然后再调用直流电机、继电器等;温湿度及光敏采集数据,检测环境是否正常,将信息发送至协调器。若出现恶劣环境,协调器调用提示音模块,告知前方环境异常。使用者一旦遇到紧急情况,可以按下网关的求救按钮,将发出短信或者电话给相关人或者部门。
[1]房鑫.基于FPGA技术的智能导盲犬[J].现代电子技术,2010(3):179-181
[2]毕开春,夏万利,李维娜.国外物联网透视[M].北京:电子工业出版社,2012:55-57
[3]Zhenghua Xin,Liangyi Hu,Hong Li.The application of infrared sensors integrating stepper motor based on C8051F120[J].Advanced Materials Research,2012,476-478:2133-2136
[4]Zhenghua Xin,Liangyi Hu,Na Li.The Species per Path approach to GEMGA-based test data generation[C]//2011 International Conference on Multimedia Technology,2011:3765-3769
[5]辛政华,赵轶,邵笑笑,等.基于物联网的C/S架构的智能农业系统的设计[J].宿州学院学报,2011(6):25-27
[6]郭栋,秦明芝,王伟敏.基于CC2430的ZigBee无线传感网络设计与实现[J].物联网技术,2011(3):41-43
[7]王兰忠,侯萌,徐元.基于ZigBee族树路由的链路寻址方式改进[J].小型微型计算机系统,2011(6):1085-1088
[8]石风刚,段晨旭,肖现华,等.基于无线传感器网络的嵌入式Web服务器研究与实现[J].微计算机信息,2011(3):148-151
(责任编辑:汪材印)
2013-03-18
国家级大学生创新创业训练计划项目“智能导盲犬的设计”(201210379006);“基于A900的嵌入式报警管理系统”(201310379023);安徽省大学生创新创业训练计划项目“井下人员定位系统”(201310379083);宿州学院大学生科研立项“智能电风扇的设计与实现”(KYLXLKYB13-31) 。
宋劲松(1969-),江苏邳县人,工程师,主要研究方向:无线通讯。
10.3969/j.issn.1673-2006.2014.07.028
TP79
A
1673-2006(2014)07-0090-03
猜你喜欢
故事作文·高年级(2021年8期)2021-07-27 15:14:02
新少年(2021年3期)2021-03-28 02:30:27
商品与质量(2019年34期)2019-11-29 03:25:51
小学科学(学生版)(2019年6期)2019-07-10 00:52:20
测控技术(2018年5期)2018-12-09 09:04:46
电子制作(2018年17期)2018-09-28 01:56:38
阅读(低年级)(2018年11期)2018-05-14 09:37:53
信息安全研究(2016年4期)2016-12-01 06:07:05
军事文摘·科学少年(2016年7期)2016-09-20 16:49:54
电子制作(2016年21期)2016-05-17 03:52:47
