采用TMS320LF2407的自动调焦控制系统设计
2014-08-02 01:14尹宏建高慧斌乔冠宇
化工自动化及仪表 2014年2期
尹宏建 高慧斌 乔冠宇
(1.中国科学院长春光学精密机械与物理研究所,长春 130033;2.中国科学院大学,北京 100049)
光电经纬仪是对观察目标进行实时跟踪测量的光学设备。由于观察目标处于不断运动当中,使得两者之间的距离不断变化,造成目标在经纬仪上像点离焦,直接导致了成像质量的下降,这对观察和记录目标的运动轨迹、飞行参数等信息存在影响和干扰。为了避免这一现象的发生,需要在经纬仪中引入自动调焦系统,自动调焦系统的作用就是根据相关信息,调整成像面的位置,达到目标成像始终清晰的目的[1]。
目前,自动调焦的方法主要有:光电自准直法、图像处理法和传统程序控制法。由于传统程序控制法相比其他两种方法有操作简单、对硬件要求较低及实时性好等优点,传统程序控制法主要用数据拟合的方法,利用光学设计和实验数据得出调焦公式,并以此为依据,编制相应控制程序[2]。在此,笔者采用传统程序控制法实现光电经纬仪的自动调焦。
1 系统硬件①
自动调焦控制系统如图1所示,管理计算机把目标距离信息通过串口发送到TMS320LF2407,TMS320LF2407采用数据拟合方法计算出理论调焦量,从I/O口发出PWM脉冲,脉冲通过电机驱动电路控制步进电机带动准直镜沿光路传播方向移动,准直镜的位置信息经过电位器反馈回TMS320LF2407,形成一个闭环,反馈回的位置信息和理论值的误差驱动准直镜向着像点与焦面重合的方向移动,直到误差为零,此时图像成像最为清晰[3]。但是由于TMS320LF2407自身ADC精度的限制,传动机构的误差等因素,使得微小误差始终存在。

图1 自动调焦控制系统框图
1.1 主控芯片及外围电路
笔者设计的自动调焦系统采用的主控芯片为16位DSP芯片TMS320LF2407,能达到40MIPS的执行速度,指令周期25ns,其内部集成外设有:32KByte的FLASH程序存储器;2.5KByte的数据/程序RAM;192KByte的可扩展外部存储器(程序、数据、I/O空间各64KByte);定时器;看门狗;EV管理器;串行通信接口SCI,串行外设接口SPI,控制区域网络CAN;8或16通道可选的10位模拟数字转换器ADC[4]。电源电路采用5.0V直流电源,由于DSP的工作电压为3.3V,所以需要进行电压转换,系统采用TPS7333实现,其工作原理如图2所示。串行通信接口的驱动芯片采用MAX232,实现与管理计算机的距离信息发送和接收(图3)。
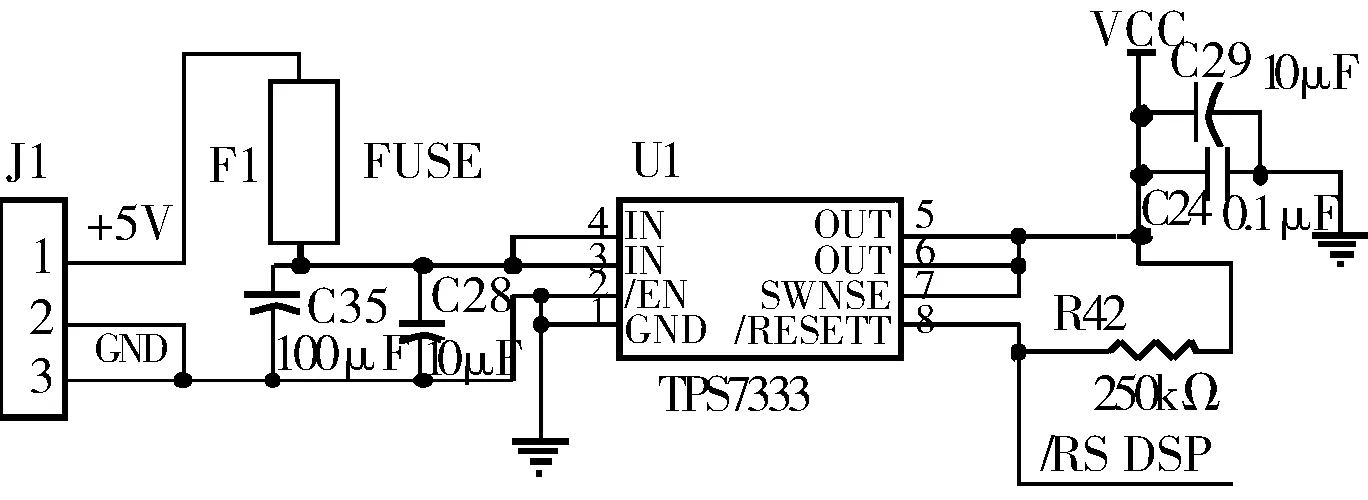
图2 电源模块工作原理

图3 串行通信接口模块工作原理
1.2 液晶显示电路
液晶采用T6963,用于显示步进电机的运行状态。T6963是一种图形点阵液晶显示器,主要由行驱动器、列驱动器和128×64全点阵显示器组成。能够完成图形显示,也可以显示8×4个(16×16点阵)汉字,共有13种指令,与CPU接口采用8位数据总线并行输入输出。TMS320LF2407的数据总线D0~D7分别与T6963的D0~D7相连,TMS320LF2407的/WE、/RD分别连接T6963的/WR、/RD,IOPE5控制T6963的数据和命令写入。
1.3 步进电机驱动电路
系统调焦的步进电机型号为35BYG007,歩距角1.8°。步进电机驱动芯片选择型号UP-4HB03M,UP-4HB03M是专用步进电机驱动器,适用于四相混合式和两相六出头混合式步进电机,PWM恒流控制方式;可选择16细分或四相八拍两种方式;输出的驱动电流为0.3A。
驱动电路如图4所示,TMS320LF2407的I/O口输出脉冲信号,控制UP-4HB03M,UP-4HB03M的CP为步进脉冲输入端,上升沿有效;FREE端为驱动器脱机端,当FREE=1时,电机处于释放状态;U/D为步进电机的运行方向控制端,当U/D为高电平时,电机正转,否则电机反转[5]。
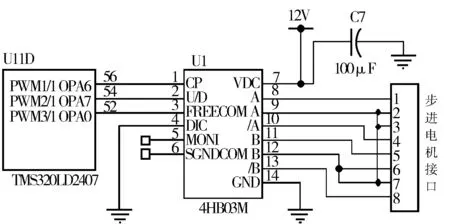
图4 步进电机驱动电路工作原理
2 系统软件
TMS320LF2407的软件设计工作是在CCSStudio_v3.3版本开发环境下进行编译、调试和仿真的。编程语言主要由C语言完成,但对DSP特殊寄存器的位操作采用汇编语言完成,例如,使能所有屏蔽中断,就需要将状态寄存器ST0的INTM位清零,用汇编语言asm(“CLRC INTM”)即可完成,与C语言相比,简便得多。
主程序主要完成一些初始化工作,包括系统初始化、串行通信接口初始化、定时器初始化和看门狗初始化,这些初始化程序主要进行对中断、系统工作频率、串行通信的波特率和接收验证方式、定时周期及屏蔽看门狗等的设置[6]。
2.1 定时器和串行通信中断程序
程序中存在两种中断,一种是定时器中断,负责对模拟量定时采样转换为数字量,其软件流程如图5所示;另一种是串行通信接口中断,负责接收管理计算机发送的距离信息和控制命令,其软件流程如图6所示。
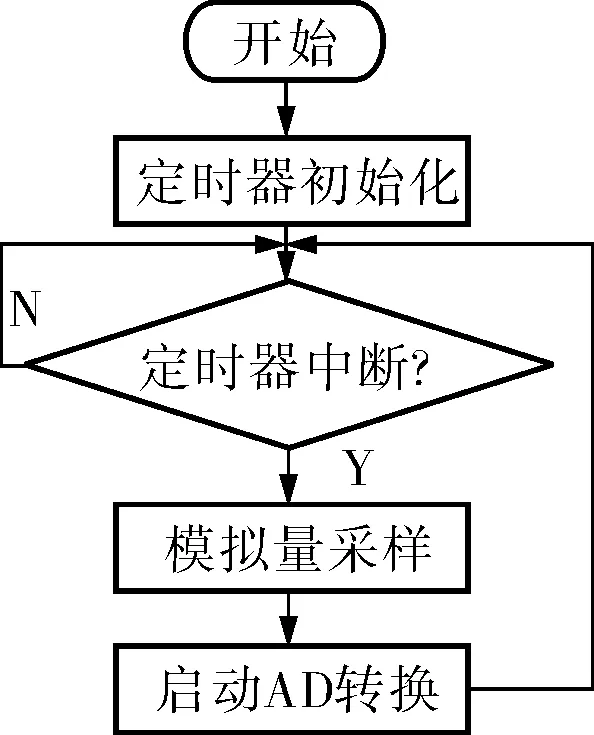
图5 定时器中断流程

图6 串口通信中断流程
2.2 系统主程序
软件主程序流程(图7)为:TMS320LF2407接收到管理计算机发送的目标距离信息,经过调焦程序计算得到理论的调焦位置与ADC模块检测到的实际调焦位置进行比较,由差值驱动步进电机进行调焦控制。
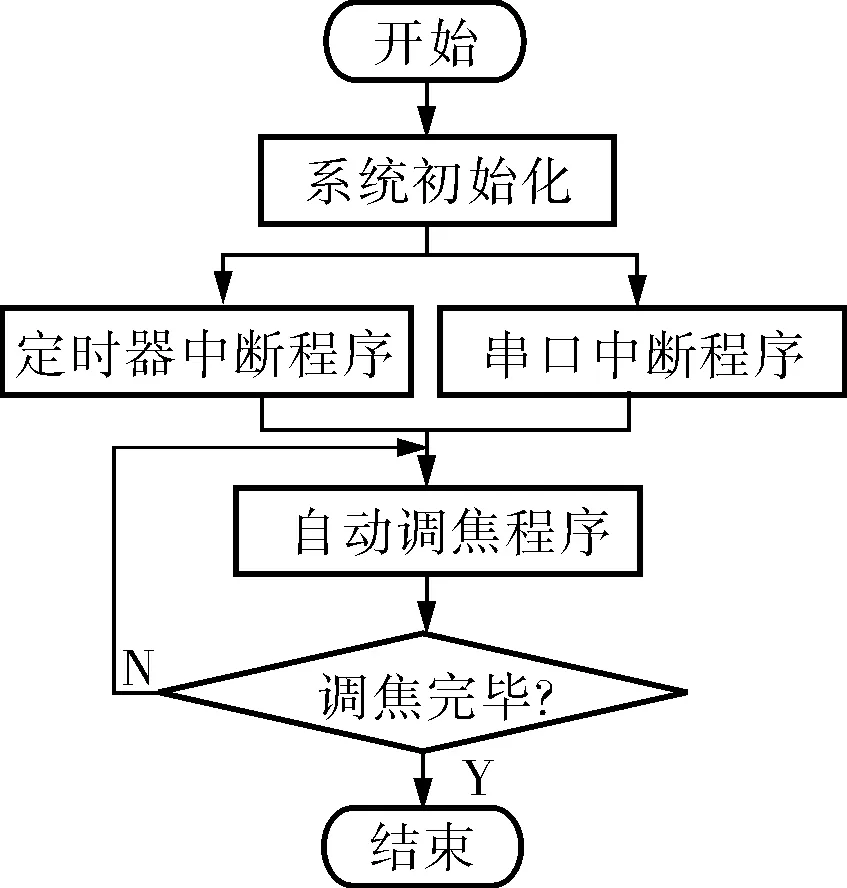
图7 主程序流程
3 实验结果与分析
基于TMS320LF2407自动调焦系统的实验数据见表1,实验数据以光学镜头焦点为原点,镜头到像面方向为正方向。
系统产生误差的原因主要有:
a. 步进电机精度误差,本系统选用步进电机歩距角1.8°,电机带动丝杠螺距2.00mm,产生的最大误差可达到0.01mm;
b. AD转换误差,TMS320LF2407自身ADC为10位精度,电位器长度25mm,供电电压5V,ADC的分辨率为4.88mV,ADC转换误差为0.024 4mm;
c. 电位器误差,本系统电位选择型号为KTM30mm,重复性小于0.000 1mm。
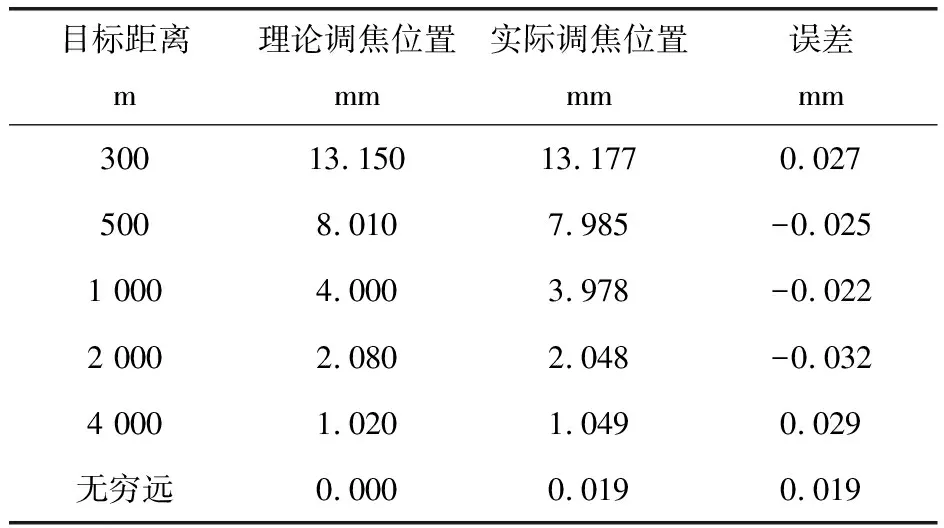
表1 控制系统测试对比
由以上数据可知,系统的最大理论误差为0.034 5mm,实验数据显示的最大误差为0.032 0mm,处于理论误差范围中。
4 结束语
笔者设计并实现以TMS320LF2407为核心芯片的经纬仪自动调焦系统。此系统具有体积小、可靠性高、功耗低、控制精度和速度都能达到较高要求等特点。并且设有串行通信接口可以和管理计算机通信和液晶显示电路对步进电机运行状态进行观察。经过实验验证,误差较小,满足经纬仪调焦精度的要求。
猜你喜欢
宇航计测技术(2022年2期)2022-06-01
测控技术(2018年3期)2018-11-25
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
百科探秘·航空航天(2016年9期)2016-12-01
光学精密工程(2016年4期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
空间控制技术与应用(2015年1期)2015-06-05
赤峰学院学报·自然科学版(2012年19期)2012-10-14
微处理机(2012年4期)2012-06-13