低空立体像对的严密相对定向
2014-08-01 10:08:30何海清程朋根王晋
遥感信息 2014年6期
何海清,程朋根,王晋
(1.东华理工大学 测绘工程学院,南昌 330013;2.江西省数字国土重点实验室,南昌 330013;3.武汉大学 遥感信息工程学院,武汉 430079)
1 引 言
低空摄影测量与传统航空摄影测量不仅飞行平台不同,且获取的影像数据也存在较大的差异,主要表现在影像的俯仰、翻滚、偏航角较大,可能达到甚至超过10°的差异,增加了立体像对的相对定向等空三过程中解算的困难[1-2]。而且,传统的航空摄影测量空三解算过程中,对某些具有较小值的复杂表达式近似简化。然而,对于大旋角像对的相对定向参数解算可能出现迭代不收敛甚至定向失败,不适用于大旋角等低空影像处理,已无法满足低空影像空三的需要。随着数字化与计算机技术的发展,全自动化、高精度的低空影像相对定向等数据处理对于提高数据处理效率意义重大。
低空影像空中三角测量主要包括两个步骤:相对定向与绝对定向。在相对定向中,连接各立体模型并构建航带自由网,把测区内影像统一到同一坐标系下,并为区域网光束法平差提供初值。相对定向后测区影像立体模型是以像空间辅助坐标系为基准的自由坐标系模型,仍需通过绝对定向,利用地面控制点,把自由坐标转换到地面摄影测量坐标。
低空立体像对相对定向是通过像对中两影像同名射线的对对相交关系来建立地面立体模型。相对定向的关系式有以下两种[3]:①单独像对相对定向;②连续像对相对定向。在处理多个立体像对相对定向模型中大多采用连续相对定向方法。
在传统航空摄影测量中,由于姿态角度值较小,可对基线分量近似简化,以便于相对定向元素求解。然而,在低空摄影测量中,由于低空影像旋偏角较大,基线分量不能进行简化,应严格按照表达式进行计算。
本文针对传统相对定向方法难于满足低空立体像对相对定向元素值高精度解算的需要,提出了低空立体像对相对定向严密解法,利用直接解法解算出相对定向元素的初值,代入推导出的低空立体像对相对定向误差方程迭代精化,实现相对定向元素值严密解算。试验表明,该方法能满足低空立体像对相对定向元素值高精度地解算,具有较强的实用性。
2 连续相对定向
连续像对相对定向是以像对中左片为基准,解求出右片相对于左片运动的5个相对定向元素bv,bw,φ,ω,κ。
如图1所示,像对中左片以S1为原点的像空间坐标系S1-U1V1W1作为参考基准,右片以S2为原点的像空间辅助坐标系为S2-U2V2W2,按共面条件列出右片坐标(u2,v2,w2)变换到左片(u1,v1,w1)的关系式为
(1)
式中,
阵9个元素表达式为:

(2)
(bu,bv,bw)为S2在S1-u1v1w1中的坐标即基线向量B,其分量表达式为
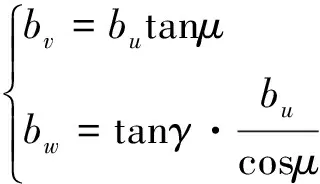
(3)
在传统航空摄影测量中,由于μ、γ角度值较小,对分量bv、bw分别简化为近似值buμ、buγ。然而,在低空摄影测量中,由于低空影像旋偏角较大,分量bv、bw不能进行简化,应严格根据表达式进行计算。
由于式(1)为非线性函数,需对其进行泰勒展开线性化,表达式为:
(4)
其中,F0为bu,bv,bw,φ,ω,κ的初值代入式(1)中得到的函数近似值,各偏导为:
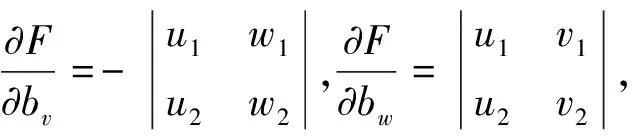
(5)
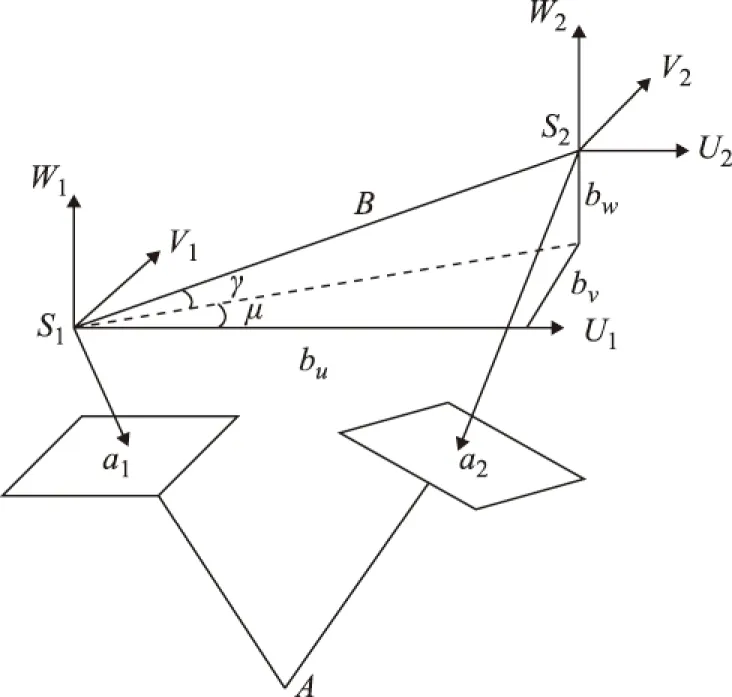
图1 连续像对共面条件
在传统航空摄影测量中,常把bv=bw=φ=ω=κ=0作为相对定向元素初值进行迭代运算。然而,在低空影像中相对定向元素以0作为初值的迭代运算难于近似地表达各影像旋偏角,可能会影响相对定向元素结果值的精度及迭代效率。
3 低空立体像对的严密相对定向
针对传统方法难于满足低空影像相对定向,本文提出低空立体像对相对定向严密解法解算相对定向元素值。首先,采用相对定向直接解[4]得到的相对定向元素作为式(4)的初值,然后代入低空立体像对相对定向误差方程进行迭代运算,进而得到精确的相对定向元素值,相关流程如图2所示。
在直接解中,式(1)展开得:

(6)
对式(6)系数用L1,L2,L3,L4,L5,L6,L7,L8,L9代替简化表示为:
L1y1x2+L2y1y2-L3y1f+L4x2f+L5y2f-L6ff+L7x1x2+L8x1y2-L9x1f=0
(7)
式(7)两边同除以L5可使得9个未知参数减少为8个,其表达式为:
(8)
其中,

(9)
可比照李德仁[5]提出的相对定向误差方程式,并给定基线B分量bu的值,利用式(3)计算分量bv、bw。同时引入左片与右片像点坐标(x1,y1),(x2,y2)改正数,其偏导为:
(10)
推导出低空立体像对相对定向误差方程为:

(11)
(12)
式(11)的误差方程可表示为:
AV=BX-L
(13)
利用最小二乘间接平差方法可得:
(14)
在解出各改正数后,代入到式(4)中进行迭代直至收敛得到最优的相对定向元素值,各参数值迭代运算表达式为:
dbv=dbv0+dbv1+dbv2+…
dbw=dbw0+dbw1+dbw2+…
dφ=dφ0+dφ1+dφ2+…
dω=dω0+dω1+dω2+…
dκ=dκ0+dκ1+dκ2+…
(15)
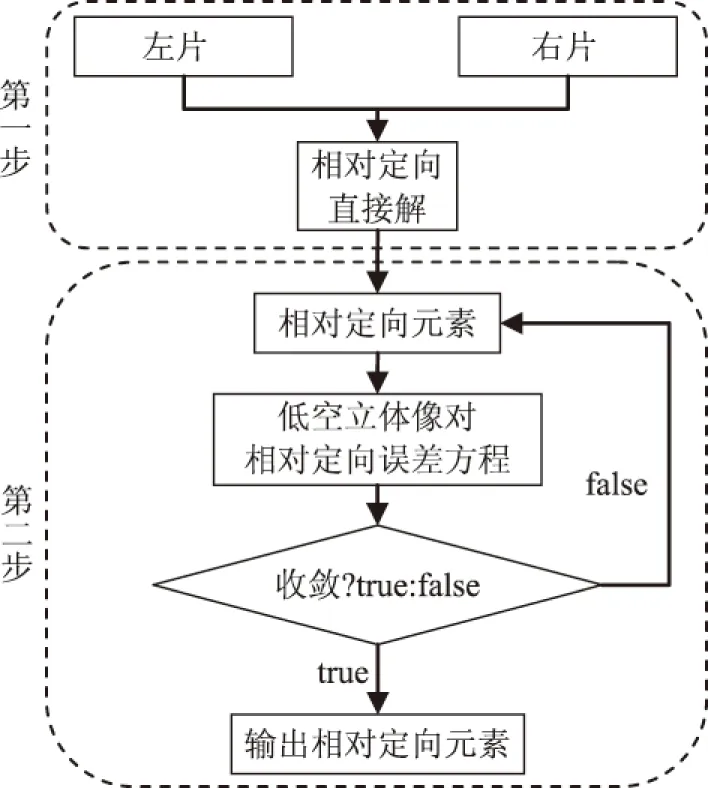
图2 低空立体像对相对定向严密解法流程
4 实验结果及分析
采用Cannon EOS 5D Mark Ⅱ相机在焦距为35.4944mm获取的3744×5616像素及像素大小为6.4μm的低空影像立体像对进行试验。
当前,低空立体像对大多利用计算机自动匹配点[6-8]来解算相对定向元素值。由于自动匹配得到的同名点可能存在定位误差,为尽量减少同名点定位给试验带来外部误差,本次试验通过人工量测16个同名点来解算相对定向元素,同名点如图3所示,拼接结果如图4所示。同时,为了便于对比分析,对传统连续相对定向、直接解、本文方法进行试验,设基线B分量bu=1000,相对定向元素及上下视差如表1所示。
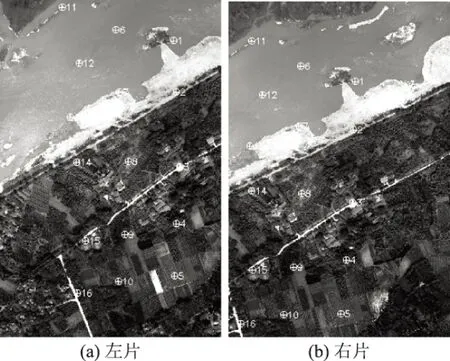
图3 低空影像立体像对相对定向点

图4 立体像对相对定向后的拼接
表1三种相对定向方法试验对比

bubvbwφ/radω/radκ/rad最大上下视差/μm视差中误差/μm传统方法1000951.163720.09580.004-0.0107-0.1312.43716.3912直接解1000945.226119.12630.0051-0.0112-0.13415.57737.5462本文方法1000953.729322.00130.0043-0.0109-0.1193.78721.5337
从以上试验对比分析可知,本文方法视差中误差比传统方法和直接解法相对定向小得多,精度也更高。
为进一步对比分析这三种方法,本文采用单航带20幅影像进行相对定向后连接模型,拼接影像试验结果如图5所示。可见随着航带的变长,影像累积误差造成的扭曲效应逐渐变大,累积误差:直接法>传统方法>本文方法。
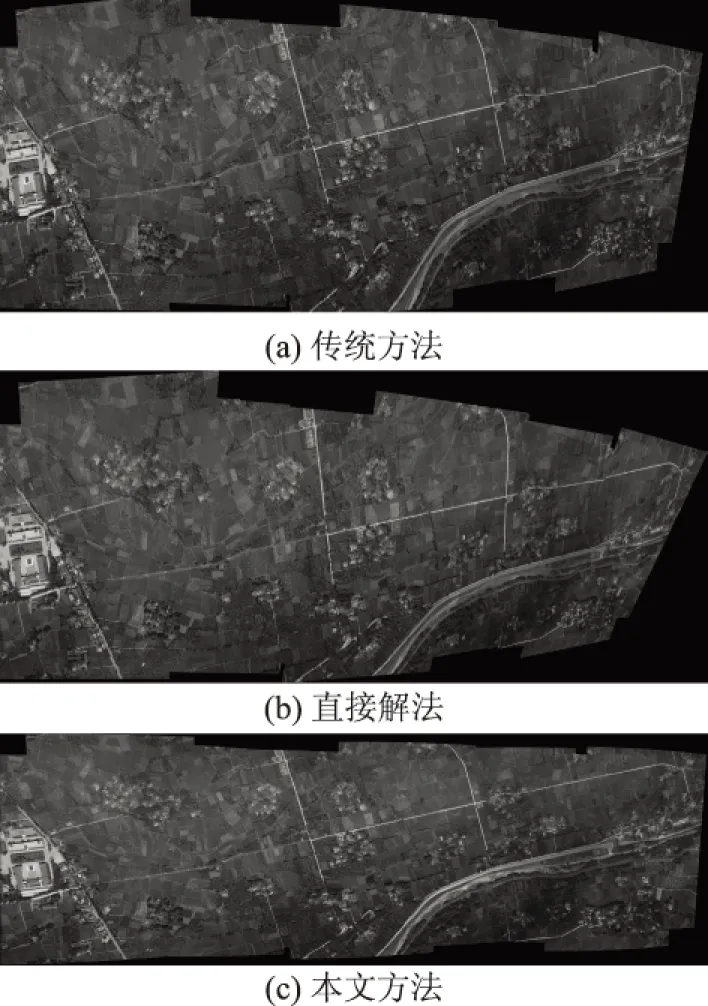
图5 三种方法单航带拼接对比
传统相对定向方法因初值选择不够准确影响解算相对定向元素的精度;直接解法不够严密,未知参数Li间存在相关性,解算结果不够稳定,也会影响相对定向结果精度;本文方法融合了传统方法与直接解法,以直接解得到的相对定向结果作为初值,通过迭代求精的严密解算,在低空影像相对定向方面比传统方法和直接解法更优。
5 结束语
针对传统航空影像相对定向元素确定的初值难于近似地表达低空影像基线和旋偏角值,从而影响相对定向元素结果值的精度及迭代解算效率,提出了低空立体像对相对定向严密解法,试验表明了该方法相对定向视差中误差仅为传统方法的1/4和直接解法的1/5,精度更高,对于诸如无人机、飞艇等作为平台的低空摄影测量立体像对相对定向解算具有较强的实用性。
参考文献:
[1] 林宗坚.多重信息多重判据影像匹配[D].武汉:武汉测绘科技大学,1987.
[2] 桂德竹.基于组合宽角相机低空影像的城市建筑物三维模型构建研究[D].徐州:中国矿业大学,2010.
[3] 王佩军,徐亚明.摄影测量学[M].武汉:武汉大学出版社,2010.
[4] 张祖勋,张剑清.数字摄影测量学[M].武汉:武汉测绘科技大学,1996.
[5] 李德仁.解析摄影测量学[M].北京:测绘出版社,1992.
[6] 柯涛,张永军.SIFT特征算子在低空遥感影像全自动匹配中的应用[J].测绘科学,2009,34(4):23-26.
[7] LINGUA A,MARENCHINO D,NEX F.Performance analysis of the SIFT operator for automatic feature extraction and matching in photogrammetric applications[J].Sensors,2009,(9):3745-3766.
[8] XING C,WANG J,XU Y.A method for building a mosaic with UAV images[J].Information Engineering and Electronic Business,2010,2(1):9-15.
猜你喜欢
数学物理学报(2022年1期)2022-03-16 06:15:04
空间科学学报(2020年1期)2021-01-14 00:53:28
数学物理学报(2020年2期)2020-06-02 11:29:10
安顺学院学报(2020年1期)2020-04-05 10:57:20
现代计算机(2019年6期)2019-04-08 00:46:50
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:46
北京航空航天大学学报(2017年9期)2017-12-18 07:12:31
南方文学(2016年3期)2016-06-12 13:54:34
中国房地产业(2016年8期)2016-03-01 01:26:16
兵器知识(2016年2期)2016-01-29 16:45:07