室内定位中融合IMU的地图匹配算法研究与实现
2014-07-25 06:05阮凤立王克己李晓阳
数字通信世界 2014年2期
阮凤立,安 倩,王克己,李晓阳
(北京邮电大学,北京 100876)
1 引言
目前,在室外车载导航系统中,地图匹配技术已得到广泛的应用;而在室内定位中,即便是米级的定位误差仍难以满足要求。室内环境空间相对复杂,而且不同的建筑物室内的空间结构一般不一样,房间走廊分布密集,从用户的角度来说,人处于走廊上和处在房间里,是两种完全不同状态和体验,现有的室内定位技术尚未达到仅仅依靠定位结果来区分人在房间和走廊的效果,本文融合了通过手机中带有的加速度计和电子罗盘所得到的进行步长估计和方向识别,获取当前人员运动状态,利用室内地图中的点、线、面要素建立一般通用的室内环境模型,并提出了一种综合行人运动状态和室内环境模型的地图匹配算法,给出了算法描述以及算法的具体实现方法。多次实际测试实验结果表明,本算法对于改善室内定位导航系统中定位误差具有较好的效果。
2 室内结构通用模型建立
由于室内环境不同(如图书馆、运动场馆、商场、机场等室内氛围都不同),室内电子地图传达给人的信息是不一样的。本文对室内地图的具体展现形式不进行深入讨论,只对组成室内地图的基础矢量数据做详细分析。
2.1 用于地图匹配的关键地图数据分类和处理
建筑物类型不同,室内地图的表达对象也不同。常见建筑物内部的对象有:入口、电梯、楼梯、扶梯、走廊、房间、卫生间等,这些对象都是由点、线、面描述的矢量图形。本文对这些矢量数据进行分类总结,建立适合室内地图匹配的通用模型,为之后提供的地图匹配算法提供参考。
(1)点要素:在本文的算法中利用最关键的点要素就是门。在室内,本文默认进入房间、卫生间等这类空间结构时都是通过门进入的。
(2)线要素:和室外道路网一样,室内也存在路网结构。电子地图中路网是由一组二维路段构成,每个路段由两端顶点和终点一系列节点组成。
(3)面要素:由n个线段围城的封闭多边形,如房间、走廊、电梯、楼梯等。
本文依据路网的存在位置将这些对象分为两大类走廊类Polygoncorridor和房间类Polygonroom,本文指的走廊类和房间类具有泛指含义,即存在路网的空间区域为走廊类,不存在路网的空间区域为房间类。
2.2 室内地理信息模型各要素之间的关系
本文提出的在该模型中,任何建筑物的内部结构都可以简单的抽象为Polygonroom和Polygoncorridor,区分为这两大类的关键因素是是否在其范围内存在路网,路网本身代表可通达性,因此走廊、大厅、过道等都可以归结为Polygoncorridor,Polygonroom通过其边界是否有门判断其是否具有可通达性,并分为可通达Polygonroom(如办公室、教室、楼梯、电梯、扶梯、洗手间等),不可通达的Polygonroom(如天井、中空等人无法到达的地方)。
2.3 室内结构几何模型抽象
本文提出的室内环境模型是从建筑物的空间结构层面抽象出来的简单模型,因为任何建筑物在几何方面都存在这些共性,模型不宜复杂,以免对匹配算法造成负担和不必要的数据量。而图1是通过本文的模型抽象出来的,仅仅包含了点线面的矢量信息,而这些信息已足够满足室内地图匹配算法的需求。
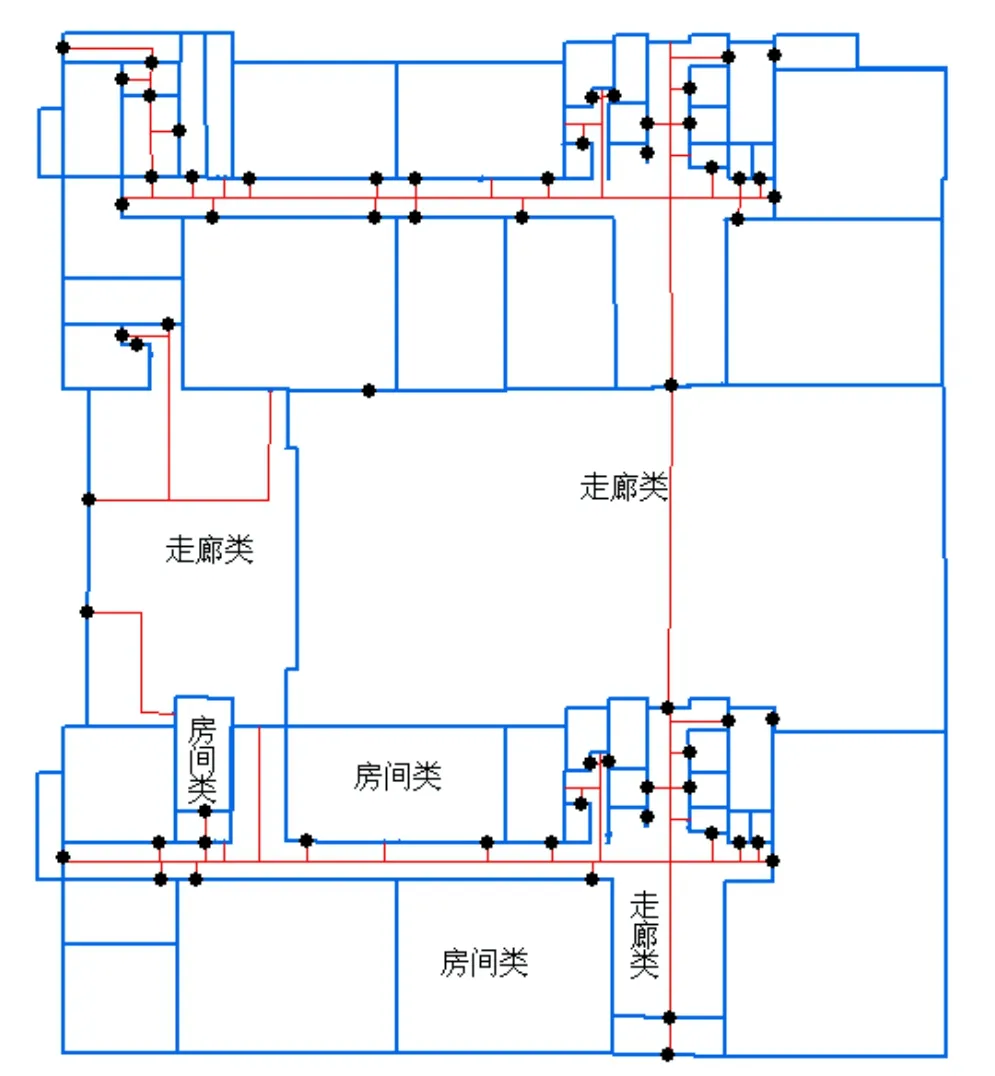
图1 抽象的室内结构几何模型
3 获取人员运动状态
人员在室内活动时,其运动状态主要由速度和方向两个参量来衡量,通过步频检测与步长估计的技术可获得人员速度参考值,此项技术目前研究已很成熟,文献[4]和文献[7]中已给出了详细的分析,本文直接引用其结论。惯性测量单元(IMU)在运动方向上的检测一直是个难点,传统的检测方法必须要求惯性器件与行人运动方向保持固定角度,这在实际应用中,显然具有局限性。文献[1]和文献[6]中提出的方法有效解决了人在随意拿手机时的方向问题,本文将直接引用其结论。本文将对人员运动状态的预估,作为室内地图匹配的重要因素之一,对本文提到的算法具有重要参考价值。
4 室内地图匹配算法
目前,地图匹配常用的算法有:直接投影法、相关性算法、概率统计法、模糊逻辑算法等[2][3]。
4.1 室内地图匹配算法需基于三个前提
(1)人处于室内环境时,人不可能处在不可通达的区域里,即本文所描述的不可通达的Polygonroom(如天井,中空等)。
(2)人在Polygoncorridor和Polygonroom切换过程中,人只能通过两者的连接要素—门,才能执行切换。
(3)统一坐标系,本文提出的地图匹配算法采用局部直角坐标系,统一以正东为X轴,正北为Y轴,因此,需要将运动方向的转化为此坐标系下的角度。
4.2 在室内地图匹配算法中需要考虑的因素
(1)行人运动的方向,每次得到定位结果的同时获取此刻手机终端的方向,作为本次定位点的方向。
(2)定位数据队列中相邻两点的位置关系,判断每次定位结果输出的点是处于Polygoncorridor还是Polygonroom。
(3)定位数据队列中相邻两点的距离。
4.3 室内地图匹配流程
(1)获取定位点此刻的运动方向,将方向的角度与地图坐标系统一。
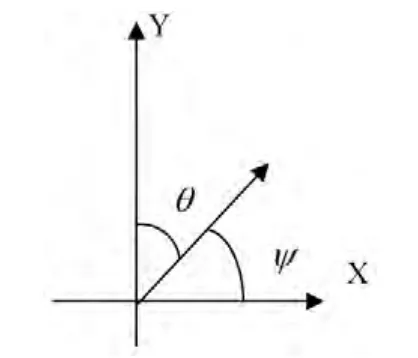
图2 坐标转换1
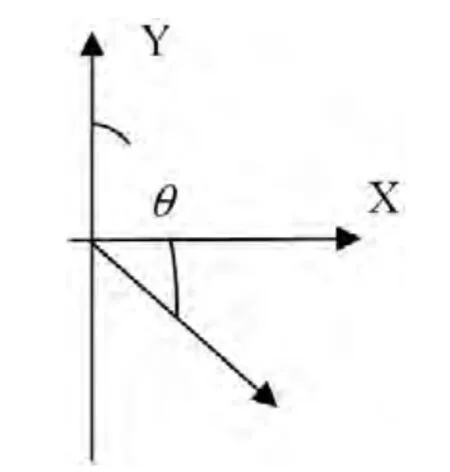
图3 坐标转换2
运动方向得到的角度一般是以正北为0°,逆时针增加,小于2π,与直角坐标系的转化关系为:


式中,θ是以正北为0的运动方向角度;ψ是转换为直角坐标系后的角度。
(2)初始点匹配模式:当进行首次匹配时,进入该模式,首先判断定位点队列长度是否大于5,否则继续加载定位点及其属性,当长度大于5后,去除其中的粗大值取均值,得到初始匹配点(x0,y0)。

(3)跟踪匹配模式:该模式下根据室内地理信息模型和前后定位点的位置关系,分为两种情况讨论:
① 相邻两定位点分布在同一类型的空间区域中。以相邻两点同在走廊类为例,采用方向权重值和距离权重值综合选择需要投影的线段。如图4所示,P点为室内定位点,线段AB是候选路段,P点到线段AB的距离为

距离越小,说明匹配到这个线段上的概率越大,距离权重值

图4中,θ为定位点的方向与路段的之间的夹角,夹角越小匹配到这个线段上的概率越大,记方向性权重值ωθ=cosθ。将范围内的所有线段计算距离权重值和方向权重值,选择权重值最大的那个线段,将定位点投影到该线段上。
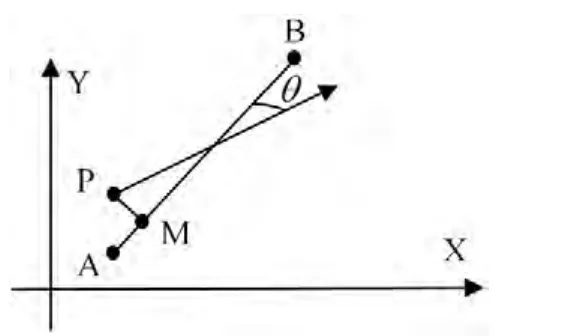
图4 走廊类上匹配时的权重值计算
② 相邻两点处于不同类型的空间区域中。首先从地图上获取两个空间区域可通达边界信息∑P1和∑Polygon,即所有点的信息和所有多边形信息,并将每个Polygon分解成Polygoncorridor和Polygonroom。
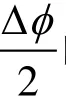
图5 不同空间类间切换时的匹配
5 应用实例和结果分析
笔者在天津海泰信息广场F座基于移动基站的室内无缝定位技术,采用相对坐标系下的高精度室内电子地图,以Android系统的平板电脑为开发平台做了大量实验。
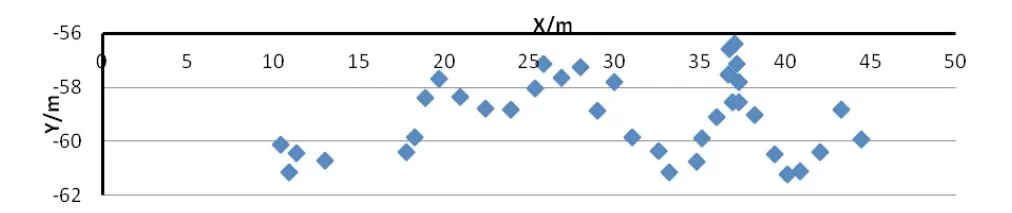
图6 匹配之前的定位点分布
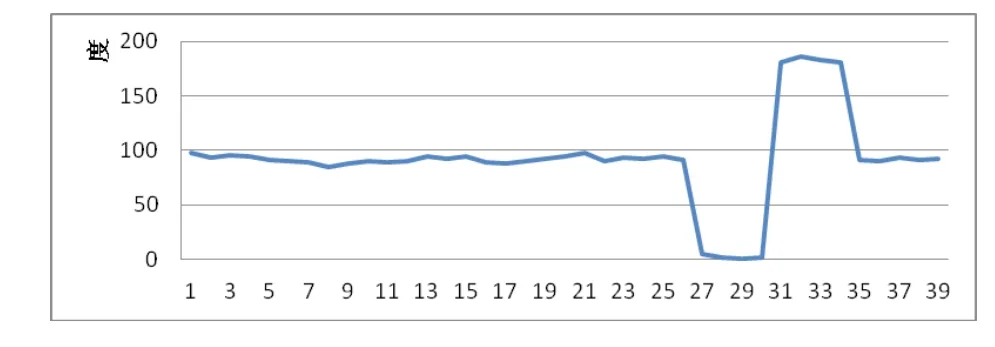
图7 定位点的方向
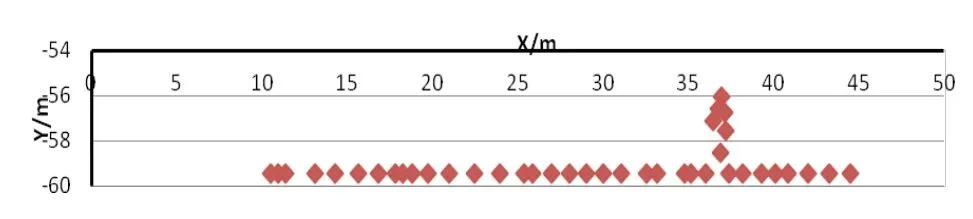
图8 匹配之后的定位点分布
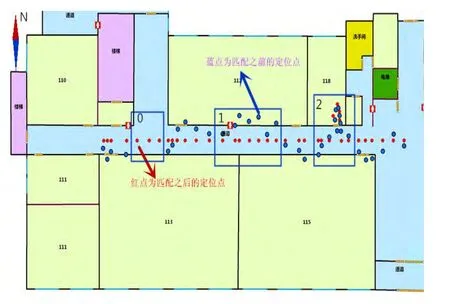
图9 匹配效果

[1] 陈伟.基于GPS和自包含传感器的行人室内外无缝定位算法研究[D].安徽:中国科学技术大学,2010.
[2] 苏洁,周东方,岳春生.GPS车辆导航中的实时地图匹配算法[J].测绘学报,2001, 30(3): 252- 256.
[3] 王楠,王勇峰,刘积仁.一个基于位置点匹配的地图匹配算法[J] .东北大学学报(自然科学版),1999,20 (4).
[4] 宋悦.融入惯导传感信息的地图匹配算法的研究及应用[D] .北京交通大学,2013年6月.
[5] 朱征宇,崔明,刘琳.一种基于GPS终端的地图匹配方法[J].计算机科学,2013,05(15).
[6] Kamisaka,Daisuke,Muramatsu,Shigeki. Design and implementation of pedestrian dead reckoning system on a mobile phone. IEICE Transactions on Information and Systems, vE94-D, n6, p1137-1146, June 2011.
[7] Haitao Bao,Wai-Choong Wong.An indoor dead-reckoning algorithm with map matching.Wireless Communications and Mobile Computing Conference (IWCMC), 2013 9th International , pp.1534- 1539,1-5 July 2013 .
[8] Renaudin V; estimation using handheld inertialsensors. Sensors, 12(7),2012: 8507-8525.
猜你喜欢
保健医苑(2021年9期)2021-09-08
河北画报(2021年2期)2021-05-25
机械制造与自动化(2018年6期)2019-01-08
中国设备工程(2018年14期)2018-08-09
环球飞行(2018年7期)2018-06-27
现代园艺(2018年2期)2018-03-15
现代园艺(2017年21期)2018-01-03
中国公路(2017年11期)2017-07-31
中国公路(2017年7期)2017-07-24
中国公路(2017年10期)2017-07-21