一种非接触式弹丸速度测量系统设计
2014-07-24 06:46姜飞,王浩
赤峰学院学报·自然科学版 2014年23期
姜 飞,王 浩
(1.宿州学院 智能信息处理实验室,安徽 宿州 234000;2.宿州学院 信息工程学院,安徽 宿州 234000;3.合肥工业大学 计算机与信息学院,安徽 合肥 230009)
一种非接触式弹丸速度测量系统设计
姜 飞1,2,王 浩3
(1.宿州学院 智能信息处理实验室,安徽 宿州 234000;2.宿州学院 信息工程学院,安徽 宿州 234000;3.合肥工业大学 计算机与信息学院,安徽 合肥 230009)
设计了一种速度大于1km/s的高速弹丸测速装置.用光纤将入射光导入至弹丸表面,将其反射光导出至光电二极管(GT101),利用光电转换后的信号触发STC12C5A60S2单片机计时器两路外部中断实现计时,根据两测量点间距和弹丸飞行的时间差,可计算弹丸速度值.利用单片机控制LCD显示速度值并作为下位机与上位机进行串行通信.将软硬件系统经集成为光电测速装置,并用于二级轻气炮的高速弹丸速度测量.结果表明:该测速装置具有简单可靠,可满足二级轻气炮宽范围速度测量的要求.
弹丸速度;单片机;串行通信
轻气炮是一种利用较轻的气体(氢或氦)作工质推进弹丸的武器,而弹丸速度就是其性能参数之一.目前常用的测量技术主要分为接触式和非接触式两类.接触式速度测量方法(如打靶法和断线法)都是通过与弹片接触测得数据,直接干扰弹丸运行方向和速度,也不能作为连发测试.非接触式速度测量方法中:电磁法通过弹丸运动对电磁场产生变化测得数据,易受测量环境周围电磁场的干扰,要求较高;多普勒法通过激光测量弹丸运动速度,主要针对超高速弹丸速度测量,通过获取信号频差(频移)来实现计算,相关的设备安装校准比较麻烦.在非接触式测量方法中应用最为普遍的就是光电法,该方法不改变弹丸运行轨迹,设备安装较为简单,可以也适用较恶劣环境的弹丸速度测量.由于光电管性能指标中时间曲线下降沿时间约为几个ms数量级在轻气炮实验中,基于光线遮断测速原理不能实现测量速度为1km/s以上的飞行弹丸.针对直径小于10mm的小尺寸弹丸速度超过1km/s,测量方式为利用反射光触发光电管,一般采用的二极管型号为GT101光电二极管.本弹丸速度测量系统设计针对在电磁干扰较大的复杂外部环境,运行速度大于1km/s、不超过5km/s的弹丸速度测量.
1 总体方案设计
基本测试环境如图1所示,在弹丸发射管上设置两个测试点,分别在两个测试点插入两根外径3mm光纤,标识为光纤1、2、3、4.光纤3和光纤4为一组与光线1、光线2一组的作用相同.光纤2功能是光的射入信号通道,把入射光投射到弹丸发射管内,根据反射原理,当弹丸经过对应测点时,弹丸表面对入射光进行漫反射,光纤1负责采集,发送信号到光电转换单元.通过高频响应数字示波器获取到两组测点光信号强度时间曲线,在通过光信号时间差和两测点间距,从而计算得到弹丸在发射管内的平均速度.为了提高信号强度,本设计在弹丸表面进行电镀处理,提高漫反射光信号的强度,增加系统准确性.

图1 弹丸发射管测点和光纤布置示意图
上述方案获取的光纤1和光纤4光信号采集进行光电转换模块处理,通过运放单元模块、数据计算处理模块,最后显示或输出弹丸速度值.为了保存和优化等处理,设计中采用RS232标准串口通信技术,上位机数据采集处理软件保存等操作.弹丸测速系统组成原理示意图如图2所示.
2 硬件设计
2.1 光电转换单元
系统设计目的是测量高速弹丸(>1km/s),这就要求光电转换单元的响应速率要快.另一个元器件性能指标是较高的灵敏度.选择了GT101作为光电转换器件作为核心转换元器件.单元电路如图3所示,根据单片机端口及其参数要求,选择下拉电阻阻抗值是51K.

图2 高速弹丸测速系统原理示意图

图3 光电转换单元电路图
2.2 放大电路单元
采集到的基本信号经过光电单元转换后,需要进行适当放大和电平转换.系统设计中为了解决环境热噪声和干扰数据,设计了调零电路,使的输出信号初始化.系统采用二级放大方式,其中一级13倍的放大倍数、二级可调倍数.图4给出了一级放大电路图.对无输入状态通过调节电位器RV1使一级放大单元输出端?T1输出值为零,进行校准.二级放大倍数默认设定为152倍,通过调节电位器RV4可以调整放大倍数,以适用不同弹丸不同反射环境,从?P1端口输出的信号为CMOS信号直接提供给单片机或示波器使用,也可以直接进行模数转换.
2.3 单片机和外围电路
图6给出了CMOS信号转换成TTL电平的单片机核心与接口示意图.为了系统运行状态与结果的查看,给单片机添加了外围显示模块(LCD1602).为了数据保存与处理需求,配备了串口通信模块.有了串口通信模块,上位机就可以获得数据,为下一步处理做好准备.

图4 一级放大单元电路图
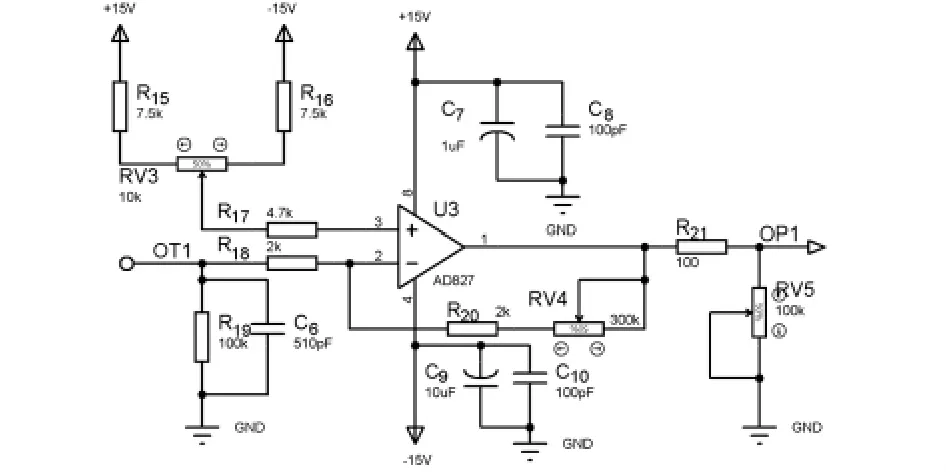
图5 二级放大单元电路图

图6 单片机核心与接口示意图
3 软件设计
本系统设计包括单片机控制程序设计和上位机处理软件设计两部分.其中单片机控制程序主要是硬件获取信号后,需要进行预处理,排除干扰信号,完成基本运算.
3.1 单片机控制程序
控制程序是针对STC12系列单片机编写的.实际测量电信号时间历程曲线如图7所示.根据经验,干扰信号和测量有效信号的持续时间不同,通常小于15μs可以认定为干扰信号.30μs以上数据看作有效数据.例如图7中信号1描述曲线中的箭头所指位置认定为短时干扰光产生的信号,经过一个震荡后,第二个较宽的稍显稳定的波峰为弹丸经过测量点所产生的信号.第二个较宽波峰开始后,延时超过15μs,如果外部信号持续低电平,认定为有效信号,此时触发单片机计时,并计入前15μs.否则,认定信号为干扰信号.具体测速程序编写结构流程见图8.

图7 弹丸对应的光信号电压时间曲线

图8 弹丸测速程序流程图
3.2 上位机处理软件设计
上位机处理软件编写环境采用VisualBasic 6.0编写,利用comm_control控件实现单片机与计算机之间串口通信.软件设计界面中增加系统通信设置界面可以选择通信端口,修改通信速度参数,以增加软件通信灵活性.利用串口线可进行远距离数据采集和存储大量实验数据.上位机处理软件运行主界面示例图如图9所示.为了提高稳定性和实用性,上位机和下位机间的通信参数和工作模式通过一个命令字来传递.
4 实验结果及分析
用2路标准光信号模拟实际弹丸表面的漫反射光,实验验证此系统的可靠性及响应特性.示波器检测实际光信号上升沿约为1us,具体验证参数:设定该2路光信号时间差为400us时,通过本测速采集系统运行处理后显示时间为401.6us,误差为0.4%;设定光信号时间差为200us时,采集系统运行处理后显示时间为201.4us,误差为0.7%.有上述数据可见,本系统的响应度和测量精度都完全能满足高速弹丸速度测量的要求.

图9 上位机软件界面示例
5 结束语
本弹丸速度测量系统设计了一种速度大于1km/s的高速弹丸测速装置,较为系统的实现了高速弹丸速度非接触式测量问题.并从软硬件设计方面避免了环境强电磁的影响,有效的去除了干扰光的数据,适合高速飞行物体速度现场即时数据测量.
〔1〕乔小平,高森烈,魏惠之,等.超高速炸药加速器炮口弹丸速度的测量[J].光子学报,1994(6):188-191.
〔2〕崔鹏,刘少克.磁阻型线圈发射器弹丸速度与截面积关系[J].兵工自动化,2006(9):39-42.
〔3〕高志军,颜国正,茅旭初.一种新的瞬时测速方法[J].仪表技术与传感器,2000(7):18-27.
〔4〕JoseM,CarlosM.Cost-effectiveoptoelectronic system to measuretheprojectilevelocityin high velocity impacttesting ofaircraftand spacecraft structural elements [J]. Optical Engineering,2005,46(5).
〔5〕高光天.仪表放大器应用技术[M].成都:四川科学技术出版社,1995.
〔6〕张伟伟.重活塞驱动立式二级轻气炮研制和初步调试[D].合肥:中国科学技术大学,2008.
〔7〕王永虎,石秀华.空投雷弹斜入水初始弹道数值分析[J].弹道学报,2012,(02):92-95.
TP273
A
1673-260X(2014)12-0052-03
安徽高校省级自然科学研究项目重大项目(KJ2014ZD31);安徽高校省级自然科学研究项目重大项目(KJ2014A247)
猜你喜欢
今日农业(2022年2期)2022-11-16
广东石油化工学院学报(2022年4期)2022-09-13
小学生必读(中年级版)(2021年12期)2021-12-02
娃娃乐园·绘本(2021年5期)2021-05-19
兵器装备工程学报(2020年3期)2020-04-22
国家教育行政学院学报(2020年3期)2020-04-10
工程与建设(2019年2期)2019-09-02
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01