全球深海救援力量聚焦
2014-07-24 01:56秦琦
中国船检 2014年7期
秦 琦
近年来,海上安全的重要性在一些重大海上事故出现之后越发凸显,包括马航事件、韩国客船失事、日本集装箱船折断等,凸显了全球深海搜救的必要性和高要求。如2009年6月1日法航447航班在大西洋上空失事,事发后法国立即派出“Vent se”号护卫舰、“西北风”级两栖攻击舰和“Pourquoi Pas”号调查船赶到事发地点进行搜救。其中“Pourquoi Pas”号配备有2艘潜水深度达到6000米的微型潜艇,后来又采用配备有侧扫声纳的深海自动化水下装置(AUV)、铺管船“le de Sein”号、Remora 6000远程遥控装置(ROV,又称水下机器人)等装备完成了黑匣子的打捞。
高性能装备特别是自动化机器设备在搜救和打捞过程中的作用越来越重要,这一点在潜艇救援领域表现得也特别明显。近年来,世界主要国家海上舰艇力量的快速发展特别是亚洲周边主要国家的潜艇建造和服役数量不断增多,包括潜艇搜救在内的全球深海救援需求增多。深海救援能力的表现取决于救援舰的性能和高技术搜救设备(包括深潜救生艇(DSRV)、收放系统、受压转移(TUP)系统等)性能,介绍以深潜救援舰及深潜救生艇等为主的深潜搜救力量现状。
统计显示,亚洲周边主要国家的潜艇力量最多的是俄罗斯,在役数量为62艘,计划建造或在建数量22;其次是韩国分别为23和20;日本是16和4;印度是15和15艘;巴基斯坦是8和3;新加坡是4和1;印度尼西亚是2和12;越南是2和6;马来西亚目前在役的潜艇数量为2艘。
深潜救援过程
深潜搜救过程一般包括设备的准备、设备入水、对接、设备回收和治疗处理等步骤。以新加坡的专用潜艇救援舰“Swift Rescue”号为例,该船进行深水搜救时需要进行四个步骤:一是设备下水。“Swift Rescue”号在获知潜艇需要求救的消息后,抵达潜艇失事水域,船上的深潜装置DSAR 6应在15分钟内入水,并且依据潜艇所在深度应在30分钟内抵达;二是设备与潜艇对接。当失事潜艇将信息提供给外界时,DSAR 6开始进行搜救过程,DSAR 6的内部首先受压以匹配潜艇的内部压力,然后将其底部舱口与潜艇逃生舱口进行对接,潜艇艇员通过连接舱进入DSAR 6,每次最多可以救援17人;三是设备的回收。在所有艇员进入DSAR 6后,DSAR 6返回至水面并回收至“Swift Rescue”号。然后艇员直接从DSAR 6进入减压舱。应保持定常压力直至进入减压舱,以防艇员受伤。四是人员的治疗处理等。
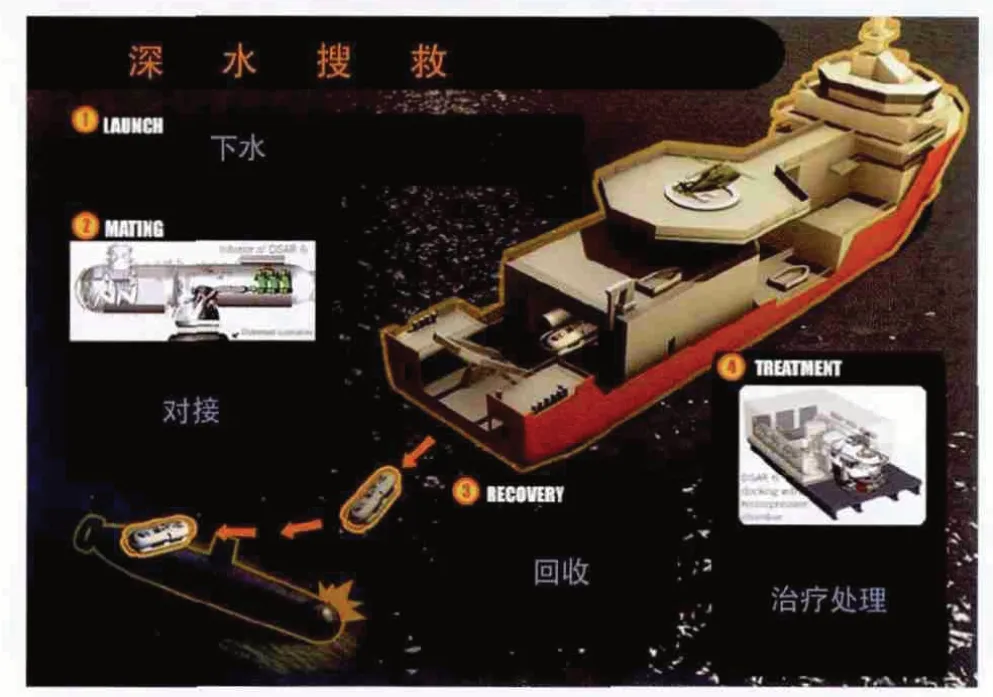
图1 新加坡海军的深水救援过程
全球潜艇救援舰主要力量
据简氏年鉴统计,目前全球专用型潜艇救援舰主要分布在俄罗斯、德国、澳大利亚、土耳其、日本、韩国、新加坡等国,明显表现为亚洲主要国家比较青睐专用型救援舰,其中俄罗斯、澳大利亚、土耳其、韩国和新加坡近年来还进行了该型舰的服役或新建。
从目前在建的潜艇救援舰艇参数来看,主要特点表现为船长在100米左右、排水量约为5000吨左右、多采用类海工船舶船型设计、多采用柴电推进、救援设备多采用船尾收放、多采用动力定位等。从这类新建舰船的救援工具来看,救援设备综合化趋势比较明显,例如俄罗斯在建的首艘“Igor Belousov”级潜艇救援舰将在2014年服役,船上可能将配备一套潜水深度为700米的深潜装置、特制的潜水员设备和一架直升机,并将配有英国Seaeye Panther plus型ROV,该ROV将配备有声纳、声学跟踪系统、切割装置、机械手、提供潜艇水下图像的摄像机,该ROV还能够为失事潜艇提供应急生命支持备品。
需要说明的是,一些潜艇救援能力较强的国家例如美国、英国等近年来不再建造专用潜艇救援舰,这主要源于其更加关注高性能可移动式救援设备有关,其研发方向表现为救援船通用化、救援设备的专用化。
日本AS-405和ASR-403专用潜艇救援舰
目前日本拥有2艘专用型潜艇救援舰,分别是“Chiyoda”号(AS-405)和“Chihaya”号(ASR-403),分别在1985年和2000年服役。
AS-405是一艘兼潜艇救援、潜艇维修和补给等多种功能于一体的救援舰,配备有1台无动力潜水钟和1艘DSRV,搭载精密的导航设备和声纳设备,并携带潜艇所需的多种物资,包括粮食、淡水、鱼雷、导弹以及其他物资,还能为潜艇的电池提供充电服务。舰上设有维修工厂,能为潜艇提供的维修与检查。其布置特点主要包括:舰舯内部设有一个由上甲板垂直贯通舰底的大型作业井,作业井下方是舰底的大型舱门。作业井前方的上甲板设有装载深海载具(包括DSRV、潜水钟等)的收纳库,旁边为发电机室与机械室,电池室与气体控制室则位于作业井后方。作业井两侧位于第二层甲板处设有两个减压舱室,左、右各一。减压舱的气体调节室与压缩机室则位于第三层甲板。对于设备的转运方面,作业井前方的上甲板设有1台起重装置,包括1台液压起重机以及几组绞盘,负责运送与收放潜水载具。上甲板顶部设有供起重机使用的纵向与横向滑轨,纵向滑轨用于潜水载具在收纳库与作业井之间的收放,横向滑轨则用于潜水载具在作业井两侧的减压舱室靠接。此外,为避免本身轮机的噪音与振动干扰到搜救时的声纳探测,AS-405进行了主机降噪减震,轮机装备均置于弹性减震基座上,采用隔音罩隔离减速齿轮箱,主机舱内也设置吸音材料来降低辐射出的噪音。

图2 AS-405(上)和AS-403(下)潜艇救援舰
ASR-403是一艘集潜艇救援和医疗服务功能于一体的救援舰,根据AS-405而设计,但进行了扩大改良,增加了排水量,救援能力高于AS-405,并且提高了医疗功能、自动化程度。为确保舰艇舱容和提高适航性能,该舰采用艏楼船型。船上配备有1艘DSRV、1台ROV、1台潜水员运载工具(PTC)、1台深海潜水装置(DDS)、1套海底调查装置等多套搜救设备。其中DDS由潜水员运载工具、甲板减压舱、主控制台(MCC)等组成,用于下放潜水员作业;ROV的主要作用是远程操纵辅助DSRV的作业,它的搜索深度达到2000米,拥有2个机械臂,由起重机吊装升降,由舰桥内的救援指挥所负责远程控制。DSRV、DDS、ROV等救援设备(系统)集中布置在舰船振动较小的中部月池周围,甲板减压舱为满足DSRV和PTC的连接要求而布置在月池右舷侧的02层甲板。救援情报中心与舰桥相邻,位于平台甲板上部,技术保障舱室集中布置在舰桥结构中的02、03和04层甲板上。主辅机布置在月池的后部,水线以下的舰体前后设有2个侧推,此外还设有与侧推和主机联动的动力定位系统,可以确保船舶停留在固定点。医疗区域布置在船舯附近的01层甲板上,靠近甲板减压舱和艇员居住区。舰体尾部设有直升机甲板,可以固定MH-53E直升机。
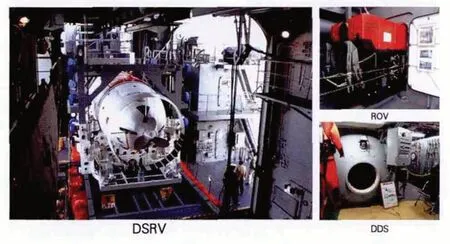
图3 ASR-403舰上搭载的三大搜救设备
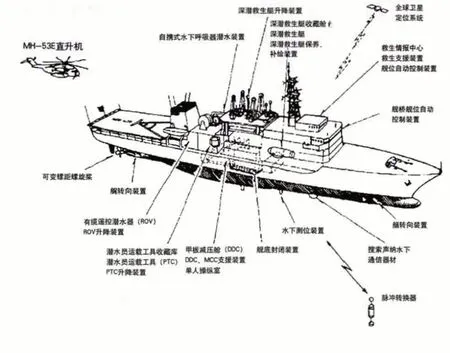
图4 ASR-403的主布置图
新加坡专用潜艇救援舰“Swift Rescue”号
新加坡海军于2007年向First Response Marine Pte公司订造了一艘专用的潜艇救援舰“Swift Rescue”号,该舰于2009年交付,入级ABS,船内的搜救设备由LR认证。

图5 潜艇救援舰“Swift Rescue”号
该舰配备有一艘深潜救援装置DSAR 6,由2名驾驶员操作,可以容纳17人,收纳库和受压转移(TUP)系统布置在主甲板上,DSAR 6尾部设有一个开口,可以确保受压人员进入TUP系统。30吨重的收放系统(LARS)布置在船尾中间,能够在最高5级海况下进行DSAR 6的收放而无需潜水员支持。一套甲板调运系统可以将DSAR 6从存储位置转移至LARS下方用于部署。“Swift Rescue”号还配备有一套ROV系统,可以探测失事潜艇位置,并且在部署DSAR 6之前清除搜救舱口的遗骸。搜救过程具有综合性较强的特点,例如医疗设施必须完整,除了TUP系统之外,同一甲板上还部署有多种医疗设备,这样便于TUP系统转移伤员。此外,该舰设有能够搭载12吨重直升机的甲板。为了便于救援,该舰还配备有6人的刚性充气艇。复杂的技术、设备可靠性和冗余性、系统的安全性对于救援任务的成功完成都十分必要,该舰采用了综合导航和跟踪系统,可以在操作过程中监控ROV、DSAR 6和失事潜艇。
据了解,新加坡海军的救援系统相比于全球现有的许多救援系统进行了一定的改进,例如采用具有高能密度的锂聚合物电池、首次配备了一套空调系统、采用了性能更佳的纵倾系统、采用综合围裙设计。该船的另一个主要创新是配备有一艘可将DSAR 6 和TUP 系统置于其上的移动筏,该筏可将救援设备通过简单的方式运至临时救援船(VOO),节省准备阶段的时间。
在设计阶段,系统的安全性极为重要,DSAR 6艇体在组装前进行了静力学实验,而且锂聚合物电池的安全性由船级社认证,例如自动切断以充电、低电池容量状态下的视觉和音频警报系统,这些电池布置在与潜水救援装置救援舱分开的独立压力吊舱中,可以更好地保护救援舰员。据称,该系统是目前全球少数能将各种救援任务集于单一平台的救援系统。
另据了解,在设计过程中,设计人员尽量采用国际标准,例如所有的舱口和接口均采用STANAG 1297规范,这样可以与其他国家采用类似标准的潜艇和系统兼容。
美国临时救援舰(VOO)
美国海军在1970年1月研制了首套DSRV“Mystic”号,以克服McCann潜水钟的缺点。DSRV具有更大的救援能力,救援人数更多,救援深度更大。美国海军当时建造了专用潜艇救援舰(ASR)或采用特殊改装的潜艇运输DSRV。不过随着救援技术的发展,DSRV的缺点显现,比如全球部署能力有限以及较难运输,于是美国海军又研制了最新救援系统SRDRS,它采用空中运输方式,可以安装在所有的VOO,即具有足够的甲板空间或设施以容纳SRDRS的民用或军用船舶,这样在失事潜艇附近的船舶就能作为SRDRS平台,消除了对改进型潜艇或专用型母舰的依赖。作为VOO的船型包括海洋供应船、平台支持船、锚作船等,由于全球分布有大量的该类型临时救援舰,因此可以提高快速救援能力。这一点可以从美国潜艇救援程序(见图6)看出,美国海军注重通过母舰标准化/通用化以及设备的空中运输方式而提高救援响应能力包括时间和速度、救援质量等。
美国海军对VOO的要求如下:为满足适航性,船长最小67.05米,船宽12.19米。人员装载最低要求为25人。甲板可利用区域的尺寸最低为29.87×10.36米。甲板最小静态强度要求是614 lbf/ft2(LARS)和512 lbf/ft2(全部),最小动态强度要求是1024 lbf/ft2。动力定位方面,采用4点系泊时能够在半径小于152.4米的观测圈内保持定位,满足美国海军的最低定位要求(ABS DPS-2)。
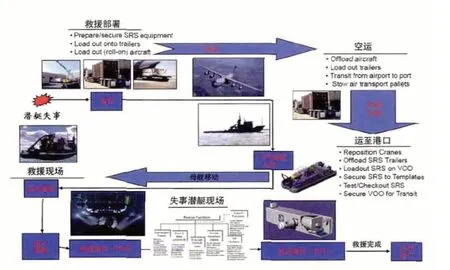
图6 美国潜艇救援程序
全球主要深潜救援装置技术发展
潜艇救援系统主要装备包括DSRV、潜水钟、ROV、饱和潜水系统、单人常压潜水装备以及甲板加压舱,其中目前的主要救生设备是DSRV和潜水钟。
据简氏年鉴2013 ~2014统计,目前全球(不包括中国)主要国家的海军拥有不同类型的DSRV约16种(俄罗斯1837项目不详),美国、俄罗斯的DSRV数量较多,其余国家基本上保有量为1套。从装置的研制来看,美国、英国、加拿大、瑞典、俄罗斯、日本等属于DSRV研发能力较强的国家,其中英国James Fisher Defence(JFD)公司、美国Perry Slingsby systems公司、加拿大OceanWorks国际公司、瑞典Kockums公司等都属于全球顶尖的深海救援装置研发公司,例如JFD公司更是为多国海军研制了多套系统,例如如瑞典的“URF”号、韩国的DSRV-5、新加坡的DSRV-6、俄罗斯的“Priz”级等。
美国SRDRS
2008年,美国海军将潜艇救援潜水和减压系统(SRDRS)取代之前服役的“Mystic”号(DSRV 1),成为美国海军新的潜艇救援系统。该系统采用“即插即用”构造,能够进行快速部署。据了解,“Mystic”号(DSRV 1)是洛克希德导弹和航空公司建造的一艘深潜救援艇,1971年8月服役。

图7 部署中的SRDRS
SRDRS 项目是一个三阶段项目,第一阶段是2006 年服役的充气潜水系统(ADS),它是一艘容纳1人的微型潜艇(潜水装置),拥有独立的推进能力,潜水员可以利用侧扫声纳探测到最大深度处于610 米的潜艇,该系统可以进行全球飞行运输。第二阶段是无人受压救援模块系统(PRMS),它由受压救援模块、对接裙、控制集装箱和其他支持设备组成。其中“Falcon”号(PRM-1)是由Oceaneering国际公司建造的一个受压救援模块,2008年开始服役。SRDRS的第三个阶段是受压转移(TUP)系统,减压系统能使潜艇人员在最大受压5 ata的状况下从“Falcon”号转移至2 个特制的潜艇减压舱。该系统所占面积309m2,重227 吨。
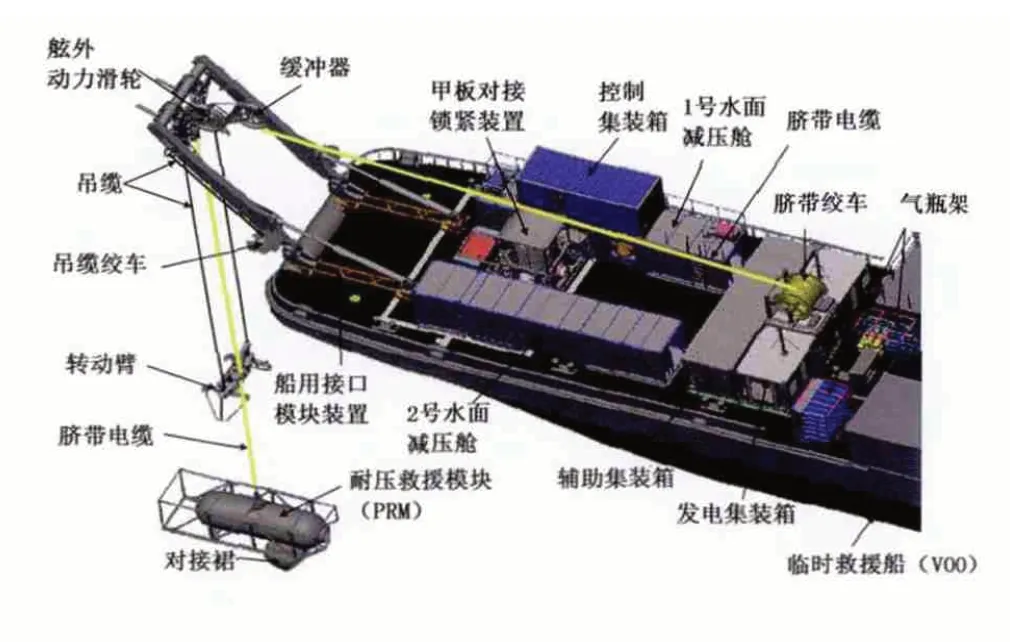
图8 SRDRS的主要组件
作为SRDRS的核心部分之一,“Falcon”号救援模块系统总长7.3米,宽2.4米,不含对接裙的高度为2.4米,包含对接裙的高度为4.4米,重20.5吨t,排水量20.6t,浮力0.9t以上,船员2人,可救援16人。采用圆柱形结构,布置有导航、视频、推进和生命维持系统。该装置可以下潜至610米水深,最大45°的角度对接故障潜艇,每次最多可救援16人,可以直接将艇员从潜艇中转移至减压舱而无需承受大气压。通过脐带电缆连接可以从VOO获得无限电力,并通过船上的一个指挥和控制站进行远程控制,可以在4级海况下进行投放。
日本DSRV
日本潜艇救援舰ASR-403搭载有一艘DSRV,它由彼此相连的前部、中部和后部三个耐压球以及中部耐压球下方的半球状救生闸套(也称救生裙套、过渡阱)组成,见图9。耐压球外壳为多层结构,前部耐压球内设有可以容纳2名船员的操纵室,汇集了连接潜艇的各类设备;中部耐压球是救生舱,与舱口连接,可以容纳12人;后部耐压球则为设备室(机舱),集中安装有冷藏设备、通信逆变器、海水输送泵等辅机设备。推进装置采用电力推动,除一台主推进装置外,还配备2个水平推力器和2个垂直推力器,推进电源由安装在救生舱顶部的两组氧化银锌蓄电池供给,使用时由小型升降机降下蓄电池,蓄电池的驱动时间约为2 ~3小时,位于收纳库上方的充电室内要求保持一定的温度,约为24℃。
图9 日本ASR-403救援舰上搭载的DSRV
DSRV 首部装有投光机、摄像头和声纳,并且装有机械臂,可以移除海底障碍物和采集样本。据操作员称,机械臂的操作十分困难,并非直接采用操纵杆操作,而是通过一套机器人模拟系统根据模拟画面操作,系统十分灵敏,要求谨慎操作。另外,DSRV 的投放方向变更为朝向船尾,以改善对声纳的影响。
北约NSRS
北约潜艇救援系统(NSRS)是由英国、挪威和法国三个国家联合研制的救援系统,英国设备和保障组负责承包管理以及服役阶段管理。2004年,罗尔斯·罗伊斯公司领导的团队获得了长达10年的设计与建造合同。该装置的主要核心是一艘自由航行的深潜救生艇(SRV),2008年11月该系统服役,服役年限有望达到2033年,主要部署在英国克莱德河海军基地。
NSRS的主要特点包括全球部署能力、可全部空运、拥有现代的自由航行潜水器、配备ZEBRA电池系统、高级跟踪和通讯能力、拥有可移动式收放系统、高海况收放能力、配备超高压医疗治疗设施、配备ROV。它由两套独立运动的系统组成,分别是负责现场清理准备和生命支持的一套维护系统(IROV)以及负责救援的一套救援系统,后者由1艘SRV、1套移动式收放系统(PLARS)、1套TUP减压系统以及相关支持设备组成。

图10 北约潜艇救援系统中的SRV采用C 17运输机空运
IROV的部署需要一套专用A字吊收放系统、绞车、脐带管、控制室、导航和设备设备、发电设备等支持,要求能够执行失事潜艇定位、搜救准备、提供必要的备品(包括食物、水、空气控制设备和医疗需品)等操作。
SRV由Perry Slingsby公司制造,SRV长约9米,重30吨,内设3名船员,分别是正副驾驶员和救援舱操作员,能够从最大600米水深处救援15名艇员,最大对接角度达到60°。SRV可通过商用船舶或军用母舰在有义波高5米、海况6级的环境下进行投放和回收,这些母舰主要是能够安装便携式投放和回收装置的海上支持船。SRV采用ZEBRA电池,电池组的续航力实现了在不充电的条件下进行5次救援,但在救援过程中涓流充电有利于持续操作。救援舱最大压力为6bar,可完成待救援人员从失事潜艇至减压设施的转移。配备有一套先进的通讯设备,包括水下电话、调制解调器、轻型光纤脐带管。母舰上配备100t的A字吊,安全工作负载30t,配备有波浪补充装置和减振器以实现极端环境下的安全操作。PLARS还能够在无潜水员支持的情况下采用吊索回收高海况条件下的SRV,使用导索和一套闭锁捕捉装置进行操作以尽最大可能提高所有人员的安全。TUP系统拥有2个类似的减压舱,能够最多容纳72人。各种支持模块包括氧气输送模块、维修车间、控制室和环境控制室等要求用于支持该系统操作,总重达到120t。2个移动式可容纳2人的减压舱可以进行病员的移动和治疗以及照顾。布置在一个10英尺标准集装箱内的移动式导航、跟踪和通讯系统(PNTCS)用于跟踪NSRS水下设备,以及保持与SRV和失事潜艇之间的通讯。救援组可以利用一套移动式声音定位系统和部署系统进行主设备之间(包括SRV、ROV、失事潜艇和母舰)的定位和导航。集装箱还配备有卫星通讯、超高频、甚高频、水下电话、水下调制解调器以及通过轻型光纤脐带电缆与SRV直接相连的接口。此外,其他大量的支持设备包括一套专用的发电系统、一艘带吊艇架的刚性充气艇、医疗补给设施、SOLAS设备、保护性衣物及各类工具。

图11 采用PLARS投放SRV
由于深海救援技术不仅仅涉及军事领域,也涉及到海上安全领域,还涉及到海洋油气作业技术的发展,因此未来健全和优化深海救援技术(不仅仅为潜艇救援)的科学发展体系十分必要。
首先,深潜救援技术的思考。从以上主要国家的深潜救援技术实力现状来看,美国、欧洲(特别是英国、法国、挪威、瑞典)以及俄罗斯等国家的深潜救援技术在全球领先,未来中期内可以加强与欧洲、俄罗斯等国家在海上救援领域的技术合作,进一步提升我国的深潜救援技术。当然,深潜救援技术的自主研发必不可少。
从深潜救援技术的发展方向来看,美国、北约等国家/地区组织更加重视专用型深潜救援系统/设备的研制与应用,对于救援母舰的研发则选择了通用船型这一研发方向;日本等国家既重视专用救援舰的研发,也重视救援设备的研发;从俄罗斯、韩国、新加坡以及其他部分国家最近建造的潜艇救援专用舰来看,其发展方向是提高舰艇功能的综合化,舰上搭载的高技术装备增多。因此,选择适合自身国情的救援技术发展路线十分必要。此外,从救援技术的综合性和复杂度来看,它是一项系统的复杂工程,救援系统不仅仅包括DSRV、受压转移系统、减压舱等关键设备,还包括调运系统(包括起吊系统)、支持设备比如救援设备与母舰的兼容实施等,涉及的技术领域广。例如潜艇救援舰的关键技术主要包括总体布置和结构设计技术、舰船定位技术、深潜救生艇收放和移位以及对接技术、饱和潜水技术等。这种复杂系统的特点说明形成完整的自主研发的技术体系将需要中长期的努力,同时也可以看出某些相对简单的部分目前存在发展机遇。
其次,深潜救援任务开展的思考。由于潜艇的救援技术极为复杂,救援环境艰巨,全球海上救援特别是潜艇救援合作必须加强与深化。根据《联合国海洋法公约》、《1974 年国际海上人命安全公约》、《国际民航公约》、《1979 年国际海上搜寻救助公约》等国际性法规的规定,不论是哪个国家在海上遇到突发事件,周边就近各国都有进行快速无偿救援的义务。为搜寻海上突发事件发生地点和救助海上突发事件遇险人员,救助力量需进入或越过其他国家领海或领空,须由各国的相关机构进行联络。从全球海上安全的范围来看,区域内合作或许是一个可行的方案。亚洲的安全事务由亚洲国家主导,那么亚洲海上安全也应该由亚洲国家主导,从上述潜艇救援舰及其救援设备现状来看,中国、韩国、日本、新加坡、澳大利亚等国家的潜艇救援技术应该属于区域内一流,因此未来我国在东海和南海及太平洋等水域的潜艇救援演习可以选择与部分国家进行合作,进一步发挥区域性海上搜救大国的主导地位和作用。当然国际合作仍然面临多个困难,例如由于各国采用的潜艇设计标准和规范不大相同,潜艇救援母船及其救援设备的开发和应用也受制于这一影响。

图12 参加演练的救援舰
猜你喜欢
中外文摘(2022年19期)2022-12-17
哈哈画报(2022年5期)2022-07-11
小哥白尼(军事科学)(2022年1期)2022-04-26
小哥白尼(军事科学)(2021年6期)2021-11-02
小哥白尼(军事科学)(2021年12期)2021-03-29
小哥白尼(军事科学)(2021年11期)2021-02-28
学生天地(2020年1期)2020-08-25
数学大王·低年级(2017年8期)2017-08-04
学苑创造·A版(2017年7期)2017-06-24
文理导航·趣味课堂(2016年6期)2016-09-09