
齿轮抓取机械手运动学建模与仿真
2014-07-18 11:57仲冰冰张龙孟庆爱崔龙飞庄文许
机械制造与自动化 2014年2期
仲冰冰,张龙,孟庆爱,崔龙飞,庄文许
(南京理工大学 机械工程学院,江苏 南京 210094)
齿轮抓取机械手运动学建模与仿真
仲冰冰,张龙,孟庆爱,崔龙飞,庄文许
(南京理工大学 机械工程学院,江苏 南京 210094)
齿轮精整是利用数控精整冲床去除齿轮上毛刺以提高齿轮精度的一道工序,该工序需要将齿轮放置在冲床工作台的指定位置,且具有较高的定位精度。为了实现生产的自动化,提高生产效率,减少因人工疲劳所导致的危险事故,设计了一种齿轮抓取机械手来代替人工完成齿轮的放置并保证定位精度。分析了机械手各个运动构件与末端执行器在空间的位置关系,利用D-H法建立了机械手的坐标系,并在连杆坐标系简图的基础上,利用齐次坐标变换对机械手进行运动学建模。为机械手的运动规划和控制奠定基础。
机械手;运动学;仿真
0 引言
工业机器人,又称机械手,是在现代自动化生产设备中应用比较广泛的机械装置。它可以接受人类指挥也可以按照预先编排的程序运行,在现代化工业生产中扮演着重要角色,它被广泛地应用到各种自动化生产线上,代替人做某些单调、重复、时间长或工作环境危险恶劣的作业,如喷涂、冲压、塑料制品成型、热处理、焊接、以及在原子能工业部门搬运等操作。在许多工业生产中,由于机械手的运用,加工产品的品质和效率都得到了很大的提高,这是一次新的技术革命[1]。
齿轮抓取机械手用在某数控齿轮精整冲床上代替人工实现齿轮的抓取和放置,不仅可以保证齿轮放置位置的精度,而且可以提高工作效率,并可减少人工疲劳等原因导致的人身安全问题。本文以某项目的齿轮抓取机械手为科研背景,对其进行运动学和动力学建模与仿真,为机械手的设计和研制提供理论依据,对工业机械手的发展具有重要的现实意义。其整体结构模型如图1。
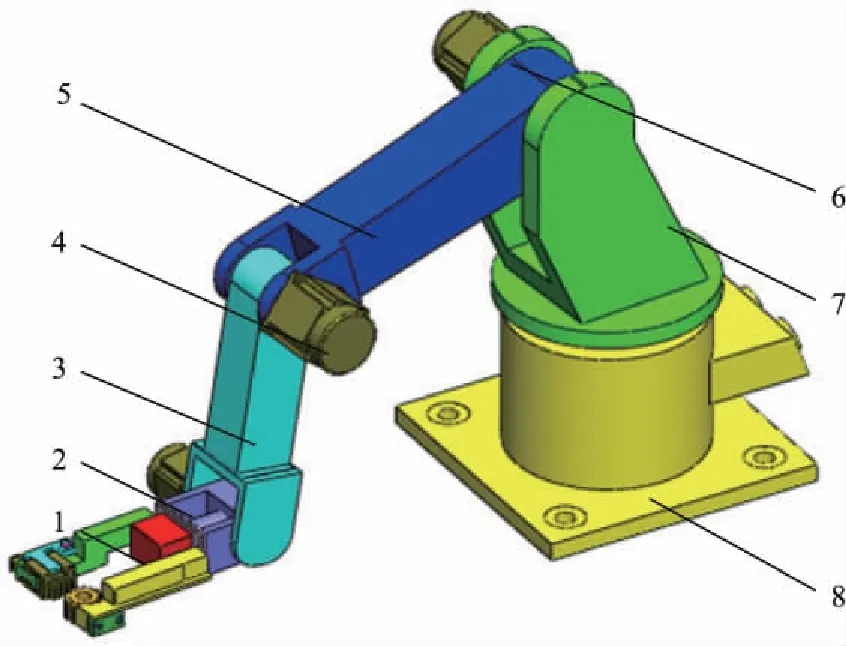
1—手爪;2—步进电动机;3—小臂;4—步进电动机;5—大臂;6—步进电动机;7—肩关节;8—底座图1 齿轮抓取机械手整体结构示意图
1 运动学建模
1.1 机械手连杆变换矩阵及其乘积
D-H坐标系的建立:机器人是多连杆多自由度的机械系统,为了便于对其进行研究分析,首先要讨论相邻连杆之间的运动关系。为了方便对机器人各杆件进行建模和分析,可以通过对关节链中的每一杆件建立坐标系进行。denavit和hartenberg于1955提出的D-H方法,其规则如下[2]:
1)zi坐标轴为沿着i+1关节的运动轴。
2)xi轴是沿着zi和zi-1的公垂线,指向远离zi-1轴的方向。
3)yi轴的方向按构成xiyizi右手直角坐标系建立。
4) 公垂线长度ai是zi和zi-1两轴间的最小距离,一般称为ai连杆的长度。
5) 两公垂线ai和ai-1之间的距离为连杆距离di。
6)xi轴与xi-1之间的夹角为θi,以绕zi轴右旋为正,一般称θi为连杆的夹角。
7)zi轴与zi-1之间的夹角为ai,以绕xi轴右旋为正,ai称为扭转角。
1.2 机械手运动学方程
a) 建立各构件的D-H坐标系
根据运动学基础分析和机械手的模型可得D-H坐标系如图2所示,其杆件相应的参数见表1。为了在一个平面内计算,只计算到腕关节部分。

图2 机械手D-H坐标系
b) 确定运动杆件的结构参数和运动变量
从图2可以看出,各个关节的转动变量都是绕着各自坐标系的z轴进行转动,可得机构的结构参数和运动变量如表1。

表1 机械手的D-H坐标
1) 由此可写出各相邻杆件坐标系间的A矩
(1)
2) 建立机械接口坐标系的位姿矩阵T4
(2)
将式(1)代入式(2),按矩阵对应项相等,依据c23=cos(θ2+θ3)=c2c3-s2s3s23=sin(θ2+θ3)=c2s3+s2c3可得:
nx=c1c234ny=s1c234nz=s234
ox=-c1s234oy=-s1s234oz=c234
ax=s1ay=-c1az=0
px=l0c1+l1c1c2+l2c1c23+l3c1c234
py=l0s1+l1s1c2+l2s1c23+l3s1c234
pz=l1s2+l2s23+l3s234+d
(3)
式(3)即为机械手正运动学方程,它描述了机器人末端执行器相对于基准坐标系的位姿。
已知夹爪的姿态后,确定姿态角。把夹爪所在的坐标系(n,o,a)相对于基础坐标系 (x,y,z)的变化:绕x轴旋转的角称为偏转角,用yaw表示;绕y轴旋转角称为俯仰角,用pitch表示;绕z轴旋转角称为横滚角,用roll表示,可得:
(4)
2 运动学仿真
2.1 机械手模型构建
MATLAB工具箱Robotics Toolbox可方便地对机器人进行运动学仿真,在仿真过程中,不仅可以直观地查看机器人的运动情况,还可将所需的数据以图形显示出来。其仿真步骤如下[3-4]:
1) 创建名为picking robot的M文件,利用link()函数输入表1所提供的采摘机器人杆件参数,link()函数调用格式为:L1=link([α、l、θ、d0]),最后一个为0(旋转关节)或1(移动关节);
2) 构建名为picking robot的机器人,r.name=’picking robot’;
3) 调用drivebot()命令,运行该程序,可得到机器人的三维位姿仿真图和控制界面图。通过在控制界面图上输入各关节角度来驱动机器人运动,显示各种运动位姿。
本文根据机械手实际工作要求,其设计变量为h=100mm,d=126mm,l0=38.6mm,l1=180mm,l2=136mm,l3=103.65mm。由机械手的D-H坐标系和设计变量可构建机械手的模型如图3所示。

图3 机械手仿真模型与控制面板
2.2 机械手运动仿真
根据机械手的工作要求,要抓取的齿轮的初始位置到终止位置上升高度为45mm,两点围成90°圆弧,以圆弧原点为中心在水平面内横纵长度分别为403mm和351.6mm,为了提升生产效率,要求从起始点到终止点的工作时间为2s。本文以腰关节中心为坐标原点,要求腰关节旋转90°,末端执行器上升45mm。根据工作要求的初始位姿和终止位姿,可以得到机械手各个关节的角度变化曲线如图4,图5,图6,图7所示。

图4 关节1角度变化曲线
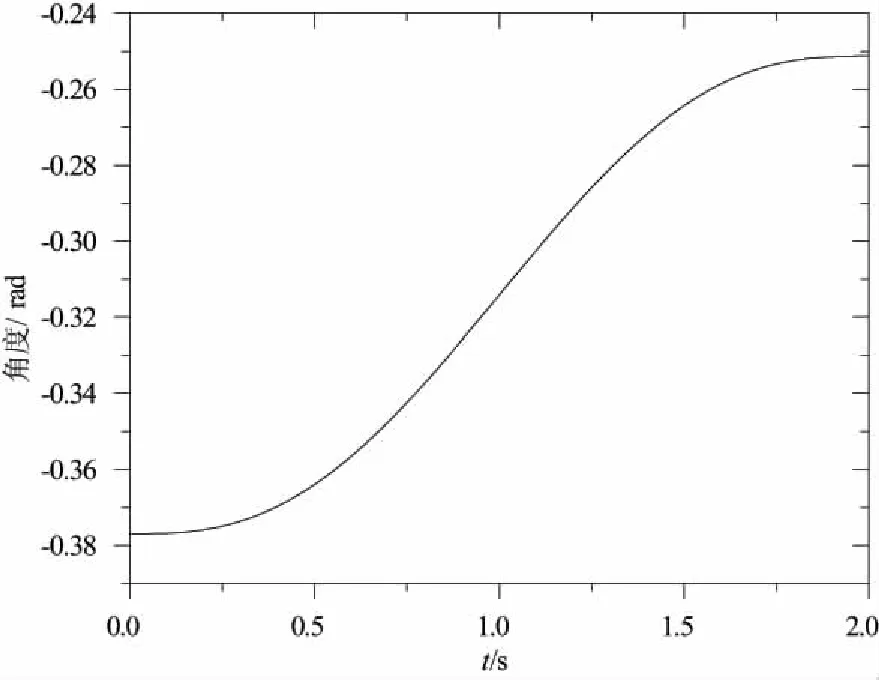
图5 关节2角度变化曲线

图6 关节3角度变化曲线
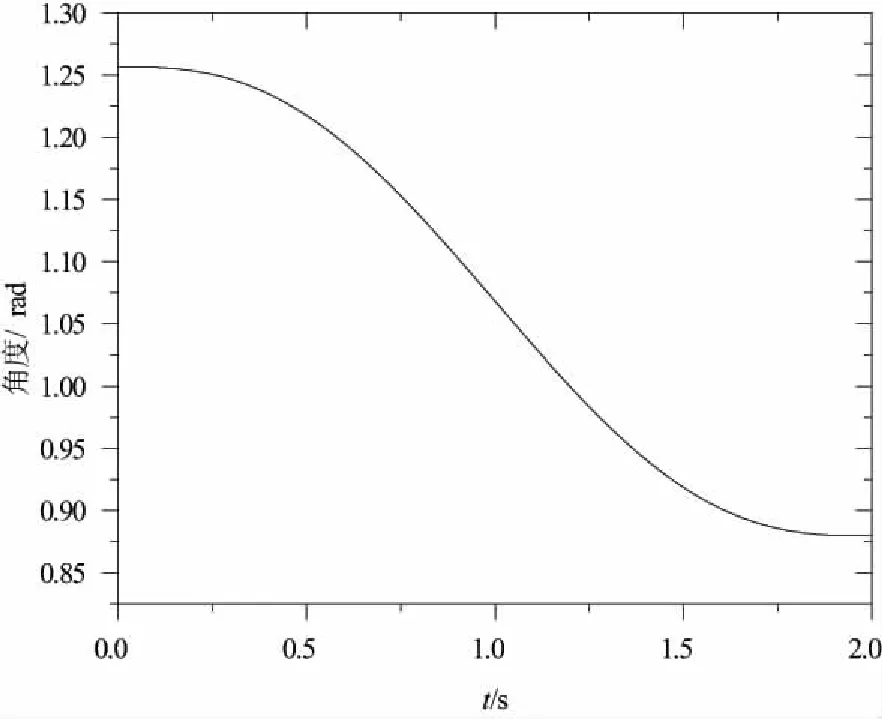
图7 关节4角度变化曲线
从图4~图7可以看出各个关节角度变化曲线可以看出各关节能够平稳地从初态运动到末态,可以很好的避免由于位置突变导致各关节力矩过大,影响机械手放置齿轮的位置精度。
3 结语
本文对齿轮抓取机械手的运动学作了研究,通过对机械手建立D-H坐标系,得到其运动学模型。利用matlab中的机器人工具箱完成了机械手模型的构建和运动仿真,为机械手运动的规划和控制奠定了基础。
[1] 石炜,郗安民,张玉宝.基于凯恩方法的机器人动力学建模与仿真[J].机器人技术, 2008.
[2] 蔡自兴. 机器人学[M](第二版). 北京:清华大学出版社,2009.
[3] 罗家佳,胡国清.基于MATLAB的机器人运动仿真研究[J].厦门大学学报,2005,44(5):642-644.
[4] Corke P.A Robotics Toolbox for Matlab[J].IEEE Robotics and Automation Magazine,1996,3(1):24-32.
Gear Crawling Robot Kinematics Modeling and Simulation
ZHONG Bing-bing,ZHANG Long,MENG Qing-ai,CUI Long-fei,ZHUANG Wen-xu
(Shool of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China)
Gear finishing is the procedure in which NC working punching machine is used to remove the gear burrs etc, but the gears need to be accurately placed at the appointed position of the punching worktable. To realize the production automation, boost productivity and reduce the accident caused by tiredness, a gear finishing robot is designed to replace workers to complete the gear placing and guarantee the positioning accuracy. In order to study the dubiety between each moving elements and the hand of the robot in the space, D-H method is used to get the kinematic modeling. Based on the con-rod coordinate system sketch, the homogeneous coordinate transformation is used to solve the positive problem of robot kinematics,which lays the foundation for the trace programming and simulation later.
robot;kinematics;simulation
仲冰冰(1987-),男,硕士研究生,研究方向为机械设计及理论。
TP241;TP391.9
A
1671-5276(2014)02-0153-03
2013-01-07
猜你喜欢
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年4期)2017-06-22
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
通信电源技术(2016年1期)2016-04-16
湖北工业大学学报(2016年5期)2016-02-27
海军航空大学学报(2015年1期)2015-11-11
