基于AMESim的增程式电动公交车动力系统设计与仿真研究
2014-07-18 11:20:51袁磊孙立清苏勰
汽车技术 2014年8期
袁磊 孙立清 苏勰
(北京理工大学)
基于AMESim的增程式电动公交车动力系统设计与仿真研究
袁磊 孙立清 苏勰
(北京理工大学)
针对纯电动汽车动力电池能量密度低、续驶里程短的问题,基于BFC6110EV-2电动公交车,设计了增程式电动公交车的动力系统参数,并根据汽车设计方法对所匹配参数进行了理论校核。在AMESim软件中利用稳态试验数据建立了增程式电动公交车整车仿真模型,采用单点恒温器控制策略,利用联合仿真方法对所设计的动力系统进行了仿真验证。结果表明,该增程式电动公交车动力系统的设计与参数匹配较合理,与传统纯电动公交车相比,其动力性及续驶里程都具有一定的优越性。
1 前言
电动汽车技术虽然能够极大地减少燃油消耗和尾气排放,但因其动力电池能量密度低、车辆续驶里程短,所以制约了其发展[1]。而增程式电动汽车(Range-Extended Electric Vehicle,REEV)是当车载可充电储能系统能够提供电能时,以纯电动汽车模式运行,同时带有一个仅当增程器能量不足时启动工作的附加能量装置的车辆[2],增程器的加入很好地解决了纯电动汽车存在的问题。增程式电动汽车具有低速扭矩大、高速运行平稳、制动能量回收效率高、结构简单易维修等优势。
以某公司生产的BFC6110EV-2电动车为原型车,采用单点恒温器控制策略,设计增程式电动公交车动力系统参数,并采用AMESIM与Matlab/ Simulink进行联合仿真,以验证参数匹配的正确性及在该控制策略下车辆的动力性与续驶里程。
2 动力系统总体设计
选取发动机和电机组成增程式电动公交车的辅助动力系统(APU),整车动力系统结构如图1所示。
该增程式电动公交车为串联式结构[3],以纯电动汽车为基础,由电力驱动系统、整车控制系统和辅助动力系统组成。其中发动机能量可同时流向电池和电机,此时电池起能量缓冲器的作用。
增程式电动汽车是一个多电源电力总成系统,复杂的结构决定了其传动系统参数匹配不同于纯电动汽车和内燃机汽车。在进行增程式电动汽车的整车参数匹配时,首先要以运行工况为基础,根据动力性能指标和部件自身的技术发展水平初步确定电驱动系统的部件性能要求,再根据部件的性能对汽车的动力性能进行校核,从理论上初步评估该方案是否符合设计要求和目标,然后对电驱动系统的相关部件参数进行修正,重复以上过程,直至达到设计目标。在上述工作的基础上再开展动力源匹配优化设计和仿真,从而完成整车系统参数匹配过程。
3 动力系统部件参数设计
BFC6110EV-2电动车的整车参数及性能指标要求如表1所列。
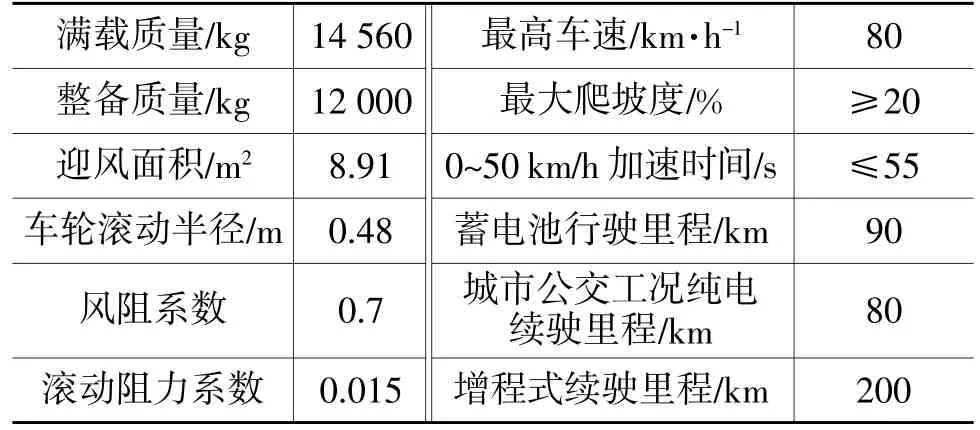
表1 整车参数及性能指标要求
增程式电动公交车动力系统的功率容量取决于驱动电机的功率容量,其参数的确定以满足车辆正常行驶和动力性要求为准则:以最高车速vmax匀速行驶;在要求的最大坡道αmax上以不低于最低要求车速vmin行驶;满足车辆起步加速性能要求,在一定时间ta内由0加速到要求车速vr。
3.1 驱动电机参数匹配
驱动电机是增程式电动公交车唯一动力驱动装置,电机的选择既要满足额定功率,又要满足最大过载转矩和瞬时功率的要求,其额定功率可以根据车辆的动力性要求来初步确定[4],即可由汽车动力性的评价指标来确定驱动电机额定功率。
3.1.1 最高车速要求下的驱动电机额定功率
电动汽车以最高车速vmax行驶时,所需驱动电机额定功率P1为:
式中,f为滚动阻力系数;m为整车质量;ηT为驱动电机到驱动轮的传动效率;A为迎风面积;CD为风阻系数。
由表1可知,vmax=80 km/h,由式(1)可得额定功率P1=99.447 9 kW。
3.1.2 最大爬坡度要求下的驱动电机额定功率
某给定车速vb下电动汽车以最大爬坡能力行驶时所需驱动电机额定功率P2为:
式中,δ为旋转质量换算系数,通过对照汽车旋转质量系数表拟定该电动公交车的δ=1.1[5]。
将表1中相关参数与δ值代入式(3),得到如图2所示的加速时间-需求功率曲线,增程式电动公交车满足0~50 km/h的加速时间不大于55 s,由图2所示曲线可得此增程式电动公交车的驱动电机峰值功率应为P3=131.734 2 kW。
式中,α为设定的最大爬坡度。
在公交车工况下,电动汽车以12 km/h的车速爬20%的坡度时,最大爬坡度下要求的驱动电机额定功率P2=141.214 7 kW。
3.1.3 最大加速度要求下的驱动电机额定功率
在加速时间ta内,电动汽车由vb加速到vf所需的驱动电机额定功率P3为:
需求的驱动电机最大功率为:
又因
式中,Pe为额定功率;λ为电机过载系数。
取λ=1.5,计算得Pe=94 kW,即需求的驱动电机额定功率Pe≥94 kW。
根据匹配要求选用JD132(A)交流异步电机作为增程式电动公交车的驱动电机,电机技术参数见表2,电机特性曲线如图3所示。相应选择TGN14型电机控制器,其额定功率为100 kW,额定电压为386 V,峰值功率为150 kW,峰值电压为460 V。

表2 电机技术参数
3.2 动力蓄电池参数匹配
3.2.1 功率与质量要求
为保证车辆的动力性,动力蓄电池的最大放电功率Pbat_max须满足:
式中,Pmax=150kW为电机峰值功率;PA为车辆附件(包括电动空调、电动助力转向系统、发动机冷却风扇等)总功率;ηmc为驱动电机及其控制器效率,取值0.85。
经对BFC6110EV-2电动车实车检测可知,车辆空调系统功率约为10kW,其它附件功率约为5 kW,则PA约为15 kW,将各数值代入式(6)得Pbat_max≥191.47 kW。
本文所选的动力电池为锂离子电池,当其比能量We为130 Wh/kg、比功率Wp为350 W/kg时,满足功率要求的电池组质量参数547.06 kg,满足能量容量要求的电池组质量参数
3.2.2 能量要求
动力蓄电池还要保证电动汽车以va匀速行驶时的蓄电池纯电动续驶里程为d1,其能量EB须满足:
式中,DOD为蓄电池放电深度,取为0.7;η为系统效率(包括传动效率、电机及控制器效率等),取值0.7。
JD132(A)交流异步电机的额定电压为243 V,电机控制器的额定输入电压(DC)为386 V,电池组的电压等级应与电机控制器的额定输入电压一致。则根据式(7)可计算电池组容量CE为:
增程式汽车要求电池具有较大的比能量和比功率。锂离子电池的比能量为100~150Wh/kg,比功率为200~450W/kg,循环寿命为800~1200@80%DOD,较适合用作电动汽车和增程式电动汽车的动力电池。
基于以上计算和分析,采用锰酸锂电池作为该车动力电池,其单体额定电压为3.7 V,单体额定容量为100 Ah,单体质量为3.3 kg;4节单体电池并联为一组,108组串联,总质量为1 425.6 kg,总电压为388.8 V,总容量为400 Ah。
3.3 增程器参数匹配
发动机和电机组成的辅助动力系统在蓄电池出现故障时应能保证车辆以va匀速行驶,即给驱动电机提供冗余功率。
增程器标定输出功率PRE计算式为:
据统计,在北京城市工况下,非环路公交车辆的最高车速为50km/h[6]。为保证增程器有足够的功率容量,并可快速地给电池组充电,以满足进入闹市区或限排区零排放纯电动行驶的要求,选择此最高车速代入式(9)来确定增程器输出功率。通过计算可得该车以va=50 km/h行驶时增程器的功率PRE≥44.1 kW。
选择永磁同步发电机作为辅助动力系统发电机,其额定功率为63kW,最大电流为270A,最低电压为130 V,额定效率为88%,质量为45 kg。发电机效率特性如图4所示。
增程式电动公交车由驱动电机而不是发动机来提供加速或爬坡的峰值功率,因此可以在减小发动机额定功率和尺寸的同时,使车辆的发动机稳定地运行在高效区。综上所述,增程式电动公交车仍需沿用技术成熟的先进四冲程发动机。
本文选用2.2 L四冲程柴油发动机,其峰值功率为92 kW,最大转矩为305 N·m,最低燃油消耗率为203 g/kW·h,对应的发动机功率为50.5 kW,其万有特性如图5所示。
当发动机额定转速在2 000 r/min附近、负荷率约为80%时具有较低的燃油消耗率[7]。根据图5可得到发动机高效工作点,由查表计算可得最低燃油消耗率点处油耗f为12.17 L/h,则满足增程式电动公交车增程式续驶里程d所需的油箱容积V为:
由式(10)可得增程式续驶里程200 km所需油箱容积V=48.68 L,故选择油箱容积为50 L。
4 参数校核及匹配结果
4.1 整车质量验算
增程式电动汽车整车质量计算式为:
式中,mch为整车底盘与车身质量;mB为电池质量;mRE为增程器质量;mmot为驱动电机质量。
增程式电动公交车采用BFC6110EV-2电动车的底盘、车身等整车参数,经过匹配后的电机与原电机相同,变速器选用2挡变速器,mB=3.3×108×4= 1 425.6 kg;增程器中发电机质量为45 kg,发动机质量为307 kg,发动机/发电机组的连接件和支撑件质量约为10 kg,则mRE=45+307+10=362 kg;原车电池质量mB1=5.5×3×108=1 782 kg。
匹配的增程式电动公交车与原车质量差为Δm=1 425.6+362-1 782=5.6 kg,即增程式电动公交车质量与BFC6110EV-2电动车质量基本相等。
4.2 动力性能校核
4.2.1 最高车速
最高车速应满足:
式中,nmax为电机最高转速;r为轮胎半径;ig2·i0为最小传动比。
经计算得最高车速vmax≤95 km/h时满足要求。
4.2.2 最大爬坡度
当车辆具有最大爬坡能力时,电机处于短时过载状态,其转矩与功率均为峰值。由表2可知最大爬坡时电机短时过载工作转矩Tαmax=850 N·m,电机短时过载功率Pαmax=150 kW。车辆爬坡行驶时应满足以下方程:
式中,Fα为车辆匀速爬坡时所需驱动力。
由式(13)计算可得该增程式电动公交车的最大爬坡度imax=tanαmax=20.64%,此时爬坡车速为10.89km/h。图6为该车的驱动力—行驶阻力平衡图,图中行驶阻力曲线仅考虑滚动阻力Ff和空气阻力Fw。
从图6可看出,该车的最高车速为93.9 km/h,则对应电机工作转速为4 373.4 r/min。
4.2.3 起步加速性能
车辆的加速性能以车辆从低速v1加速到较高车速时所需的时间来评价,车辆从静止起步加速到50 km/h时的加速时间计算方法如下。
在车辆起步阶段驱动电机转速为电机基速,此时对应的车速应满足:
式中,nm1为电机基速。0~vr加速时间为:
式中,Tmmax为电机瞬时最大转矩;Tv为电机最大功率时的输出转矩,Tv=9549Pmmax/n,n=v·ig·i0/(0.377r)。
由式(15)计算得到0~50 km/h加速时间t= 2.087+23.817=25.904 s<55 s,2.087 s和23.817 s分别是恒转矩区和恒功率区的加速时间,因此,电机的机械特性满足加速性能要求。
4.3 动力系统参数匹配结果
通过以上计算分析与校核,得到的动力系统参数匹配结果如表3所列。
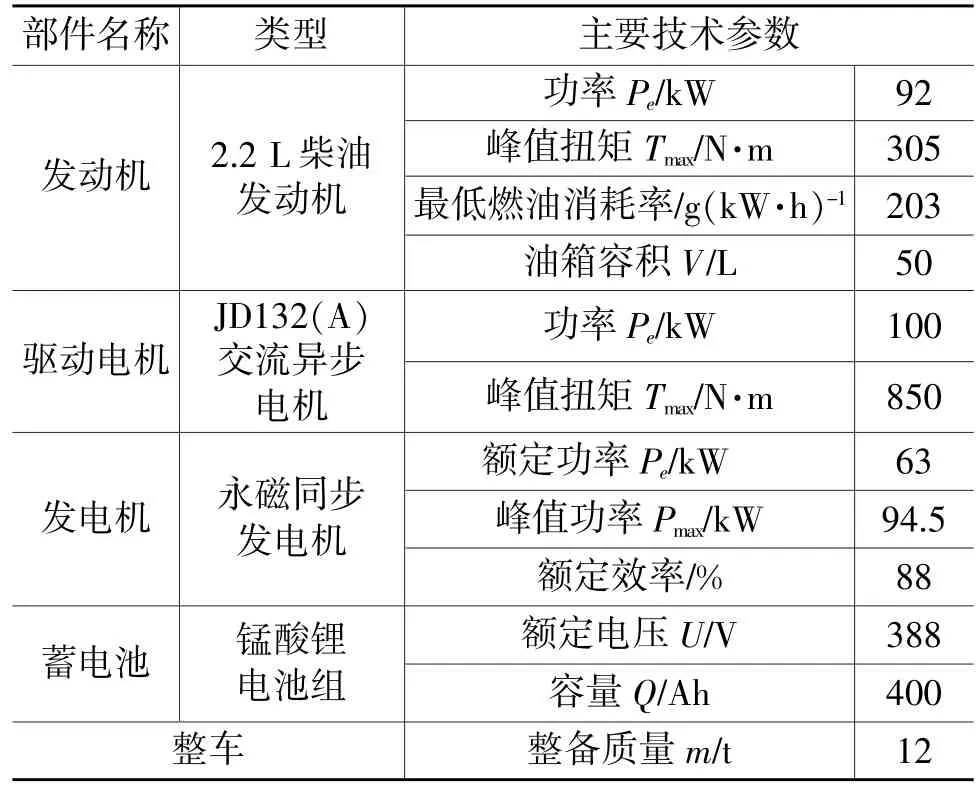
表3 动力系统参数匹配结果
5 控制策略仿真验证与结果分析
利用仿真平台AMESIM建立增程式电动公交车的动力总成,利用仿真集成环境Simulink建立整车控制器模型,并将Simulink控制模块导入AMESIM中,在此基础上进行整车联合仿真。仿真模型如图7所示。
5.1 控制策略
5.1.1 能量管理策略
仿真所用控制策略为单点恒温器控制策略,只针对我国典型城市公交工况进行增程式电动公交车能量管理策略研究,控制策略基本参数如表4所列[8,9]。

表4 控制策略基本参数
5.1.2 制动能量回收策略
电机最低回收转速为500 r/min。电机制动能量回收系数为:当SOC<40%时,回收系数为1;当40%<SOC<80%时回收系数为0.6;当SOC>80%时回收系数为0。
5.2模型验证
用BFC6110EV-2电动公交车的技术参数和试验数据对仿真模型进行验证,其中续驶里程和能量消耗是在半载质量和电池组放电深度为70%的条件下得出的。试验结果与仿真结果如表5所列。
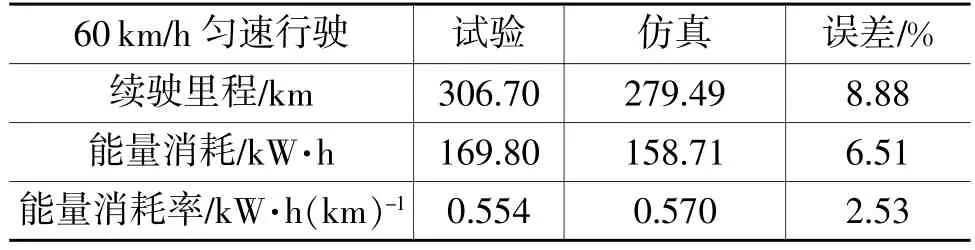
表5 试验结果与仿真结果
由表5可知,模型仿真结果和电动公交车实际试验结果误差较小,说明所建立的模型是可靠的,可通过该模型来进行性能验证。
5.2.1 动力性能验证
通常动力性能评价考察的是车辆能够达到的最高车速和加速性能(由低速v1加速到较高车速时所需的时间),在仿真过程中主要通过验证整车在循环工况下车速跟随工况的接近程度来确定。仿真时采用NEDC工况与我国典型城市公交工况进行动力性验证,同时也可验证动力系统控制的有效性。在我国典型城市公交工况下速度跟随情况、实际车速与工况车速的偏差如图8所示。
从图8可看出,在我国典型城市公交工况下,模型的实际车速与工况车速偏差较小,说明驱动电机的参数选择与驱动电机的转矩控制都可满足市区工况下的要求。
但是在我国典型城市公交工况下,最高车速没有达到60 km/h,因此选择模型在NEDC工况下运行,NEDC工况下整车速度跟随情况、实际车速与工况车速的偏差如图9所示。
从图9可看出,实际最高车速只能达到93.54km/h,与动力性计算基本符合。由于公交车质量较大,最高速度较低,高速段加速困难,在工况的最后阶段速度跟随情况较差。
由上述可知,整车的动力性能与参数匹配计算结果一致,另外,建立的动力系统控制模块也满足车辆控制要求。
5.2.2 控制策略与燃油经济性验证
在单点恒温器控制策略下,增程器在电量维持阶段开启,设置初始SOC为0.31,工况为我国典型城市公交工况,增程器工作区间为28%~30%,增程器输出功率和电池组当前SOC值如图10所示。
从图10可看出,按照控制规则增程器在电池组SOC下降到28%时开启,并输出44 kW的功率;当SOC重新为30%时增程器关闭。由于制动能量回收的原因,增程器开启前电池SOC有上升趋势。
增程式电动公交车在电量消耗阶段以纯电动模式运行,为了最大限度地保证电池组稳定可靠地工作,减少电池组不一致性对整个电池组系统工作的影响,提高电池组的寿命,在实际应用中,电池组SOC应采用经济续驶里程的工作范围,SOC取0.95~0.25。在仿真中,以0.70为动力电池SOC初始值,连续仿真1 200 s后的结果如图11所示。
由图11可看出,SOC变化量为0.038 057,行驶距离为4.440 2 km,按照放电深度DOD=0.7计算,可得纯电动续驶里程为81.67 km。
在增程器与蓄电池并行供电模式下,当蓄电池由初始值SOC0=0.4降低到设定下限值SOCmin=0.28时,启动增程器以44 kW的恒功率发电。根据当时的功率需求,给电机供电的同时也会向蓄电池充电;当蓄电池由SOCmin回升至SOCmax时关闭增程器,切换到纯蓄电池供电模式。为了保证在选定的仿真工况下能观察到增程器的启动过程,仿真时选择初始值SOC0=0.4,比SOCmin稍大。图12和图13分别为我国10个典型城市公交工况下续驶里程和整车能耗的变化情况。
由图12和图13可看出,仿真总运行时间为13 040 s,当时间为3 128 s时,蓄电池SOC从0.40下降到0.28,总行驶里程为55.06 km,其中纯电动续驶里程为12.62km,纯电动电能消耗量为15.674kW·h;增程器开启了13次,总燃油消耗量为9.46 L,循环后SOC为0.286 2。通过将蓄电池SOC的变化量换算成等效燃油消耗量,再加上发动机在工况内总的燃油消耗量,可计算出增程式电动公交车的增程续驶里程。在我国典型城市公交工况下,增程式电动公交车总的燃油消耗量、电能消耗量、纯电动行驶里程和总行驶里程计算结果如表6所示。

表6 增程式电动公交车油耗、电能消耗和续驶里程
经计算,纯电动行驶时电能消耗量为1.12(kW·h)/km;电量维持阶段的百公里油耗为22.29 L/100 km,可求得等效百公里燃油消耗为17.71 L/100 km(使用低谷电价时水平)。
通过上述分析可知,增程式电动公交车在城市工况下节油效果明显。
6 结束语
基于BFC6110EV-2电动公交车设计了一辆增程式电动公交车,给出了增程式电动公交车动力系统参数设计与校核方法。基于AMESim-Simulink联合仿真平台搭建了该电动公交车仿真模型,对定点恒温器控制策略以及动力系统进行了仿真验证。结果表明,在我国典型城市公交工况和NEDC工况下,增程式电动公交车动力性能良好,节油效果明显。
1 Al-Adsani A S,Jarushi A M,Schofield N.An ICE/HPM Genera-tor Range Extender in a Series Hybrid Electric Vehicle.5th IET International Conference on Power Electronics,Machines and Drives,PEMD 2010.
2 Tate E D,Michael Harpster,Peter Savagian.The electrification of the automobile:From conventional Hybrid,to Plug-in Hybrids,to Extended-Range Electric Vehicles. SAE2008-01-0458
3宋珂,章桐.增程式纯电驱动汽车动力系统研究.汽车技术. 2011(7):14~15.
4彭涛,陈全世,田光宇.并联混合动力电动汽车动力系统的参数匹配.机械工程学报,2003,39(2):69.
5余志生.汽车理论.北京:机械工业出版社,2008,1.
6 Wang Z P,Sun F C.Statistical analysis for the driving cycle of Beijing's bus.Journal of Beijing Institute of Technology,2004,13(4):436-440
7汽车工程手册编委会.汽车工程手册一设计篇.北京:人民交通出版社,2001.
8韩志杰.串联式混合动力电动公交车动力系统设计和控制策略研究.北京:北京理工大学,2007.
9李晓英,于秀敏,李君,吴志新.串联混合动力汽车控制策略.吉林大学学报(工学版),2005,35(2):321~324.
(责任编辑文楫)
修改稿收到日期为2013年12月17日。
A Study on Design and Simulation of Powertrain for REEB Based on AMESim
Yuan Lei,Sun Liqing,Su Xie
(Beijing Institute of Technology)
To solve the problem of low capacity density of the battery pack and short driving range of battery electric vehicles,the powertrain and control strategy of a range-extended electric bus were designed based on the electric bus BFC6110EV-2.The parameters of the powertrain were verified according to vehicle design method.The bus simulation model was built with steady state database of Software AMESim.Single-point thermostat control strategy was implemented and the co-simulation method was adopted to verify the powertrain,The results show that the powertrain design and parameter matching are reasonable,they also show advantages in dynamic performance and driving range as compared with traditional battery electric bus.
Range-extended electric bus,Powertrain,Parameter design,Co-simulation
增程式电动公交车动力系统参数设计联合仿真
U469.72
A
1000-3703(2014)08-0056-07
猜你喜欢
汽车实用技术(2022年4期)2022-03-07 03:47:32
汽车工程师(2021年11期)2021-12-21 06:23:10
北京第二外国语学院学报(2021年2期)2021-08-13 08:34:30
防爆电机(2021年1期)2021-03-29 03:02:28
汽车实用技术(2020年2期)2020-02-25 03:19:53
汽车维护与修理(2018年1期)2018-04-04 01:13:22
汽车文摘(2017年5期)2017-12-05 16:34:04
汽车文摘(2017年10期)2017-12-02 01:10:31
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33