
捷联式自动垂直钻井工具伺服控制设计及实现
2014-07-16 01:24:46王义峰刘庆龙刘文庭高丽萍
石油钻探技术 2014年3期
王义峰,刘庆龙,刘文庭,高丽萍,孙 峰
(中石化胜利石油工程有限公司钻井工艺研究院,山东东营257017)
井斜控制是油气井钻井中一个非常重要的问题,易斜地层中直井钻进的防斜打快是国内尚未完全解决的一项技术难题。常规的纠斜、防斜技术存在许多问题,如钟摆钻具组合的降斜能力受钻压影响较大[1-6],只能采取轻压吊打的方式,牺牲钻速换取井身质量。自动垂直钻井技术[7-12]是解决该问题的一种有效方法,目前只有国外少数几家公司掌握该项技术[13-20],但因引进价格昂贵,难以在国内实现推广应用。捷联式自动垂直钻井工具,可以在旋转钻进过程中通过随钻测量解算及井下伺服控制,实现主动纠斜、防斜控制,有效解决直井钻进过程中的防斜打快问题,确保井身质量,提高机械钻速,降低钻井成本。捷联式自动垂直钻井工具[21-22]主要由涡轮发电机、测控短节、力矩电机和执行机构组成,测控短节包括测量解算模块与伺服控制模块2部分。测量解算模块利用捷联算法采集并解算出井斜角、井斜方位角以及钻铤工具面角等信息,然后通过CAN(controller area network)总线发送到伺服控制模块。伺服控制模块是一个反捷联跟踪系统,根据解算出来的井斜方位角、纠斜工具面角和钻铤工具面角控制力矩电机输出轴驱动上盘阀,与下盘阀组成开关阀对过流钻井液进行控制,驱动执行机构翼肋推靠井壁,产生具有纠斜作用的侧向推靠力。伺服控制模块能否控制力矩电机输出轴稳定在井斜方位角上,是实现纠斜的关键所在。为此,笔者对伺服控制模块进行了设计,以实现对力矩电机输出轴的精确控制。
1 伺服控制方案
捷联式自动垂直钻井工具为井下全闭环控制,因此笔者将伺服控制模块设计为闭环控制结构,采用增量式数字PID(proportion integral derivative)调节,完成对力矩电机的控制。
1.1 三环闭环控制结构模型
伺服控制模块采用包括位置环、速度环、电流环的三环闭环控制结构。由测量解算模块解算出的位置信息作为位置环的给定输入,由旋转变压器输出的位置信息作为位置环的反馈输入,二者形成偏差,经过位置环PID运算调节,产生速度输出,使位置给定输入跟踪上位置反馈输入;由位置环PID运算产生的速度输出作为速度环的给定输入,由旋转变压器提供的位置信息解算出的电机速度作为速度环的反馈输入,二者形成偏差,经过速度环PID运算调节,产生电流输出,使速度给定输入跟踪上速度反馈输入;由速度环PID运算产生的电流输出作为电流环的给定输入,由电流采样电路采集电机三相绕组中的电流作为电流环的反馈输入,二者形成偏差,经过电流环PID运算调节,产生PWM(pulse width modulation)输出,使电流给定输入跟踪上电流反馈输入;DSP(digital signal processor)的PWM生成模块产生6路PWM波,通过控制功率逆变器驱动电机。
1.2 增量式数字PID控制算法
数字PID控制是一种广泛使用的、成熟的电机控制策略。数字PID控制算法原理是根据输入给定信号r(n)与输出反馈信号c(n)的偏差e(n),将偏差e(n)的比例、积分和微分通过线性组合构成控制量u(n),对被控对象进行控制。
一般位置式数字PID算法控制容易出现电机电流波动大,电机转动不平稳等问题,电机控制效果不理想。增量式数字PID算法是对位置式数字PID算法的改进,其输出为相对增量,输出结果受控制芯片误动作的影响小,每次采样的输出只与最近3个时刻的偏差有关,避免了偏差的累加,系统可靠性得到改善,运行更加平稳。
数字PID控制依靠合理的采样周期来实时获取控制偏差,假设ts为系统的采样周期,u(n)为第n次采样的输出值,e(n)为第n次采样给定值与测量值之差。
第n次采样输出值:

式中:Kp为比例系数;ti为积分时间;td为微分时间。
第n次采样输出值与第n-1次采样输出值的增量:
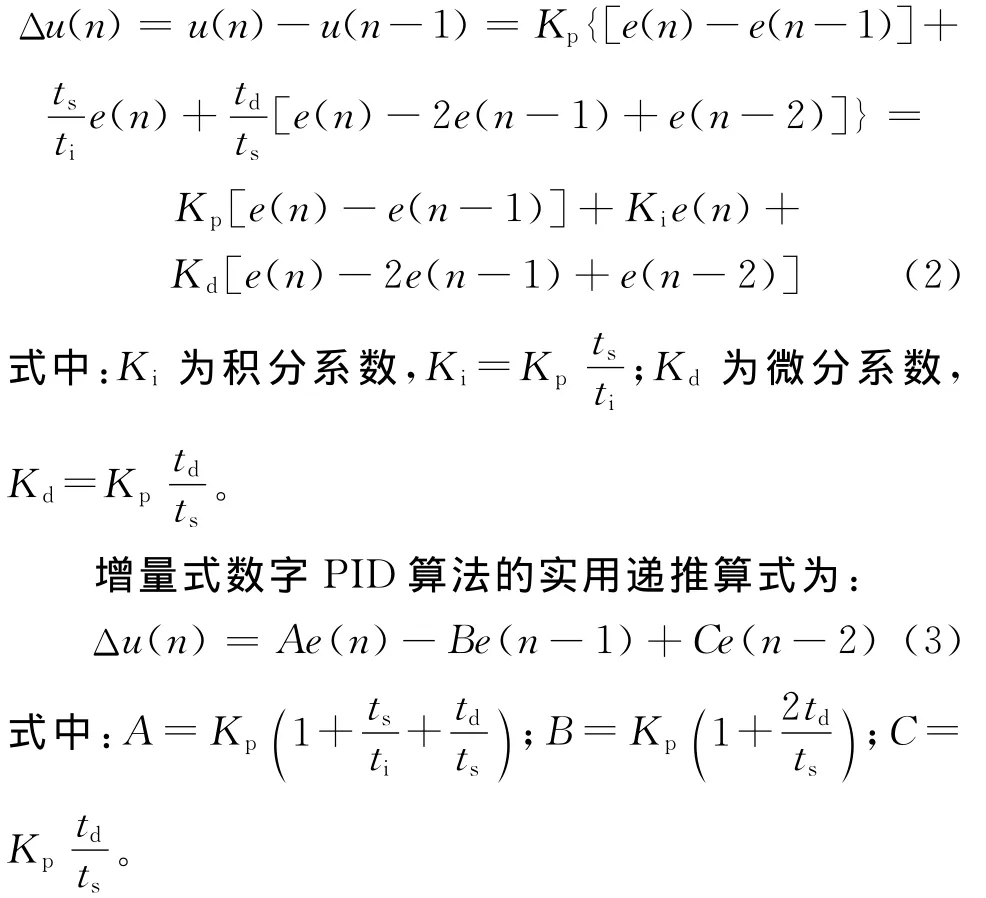
采样开始后,通过获取给定值r(n)以及反馈值c(n)来计算偏差值e(n),根据实用递推算式的组成以及系统确定系数A,B和C,计算求取Δu(n)。
2 伺服控制硬件系统实现
伺服控制模块以TMS320F2812DSP作为控制单元,结合了整流模块、电源转换模块、IPM(intelligent power module)功率驱动模块、电压电流检测模块、旋转变压器及激励模块、RDC(resolver to digital converter)位置检测模块、无刷直流电机等外围设备而构成。伺服控制系统硬件结构框图见图1。
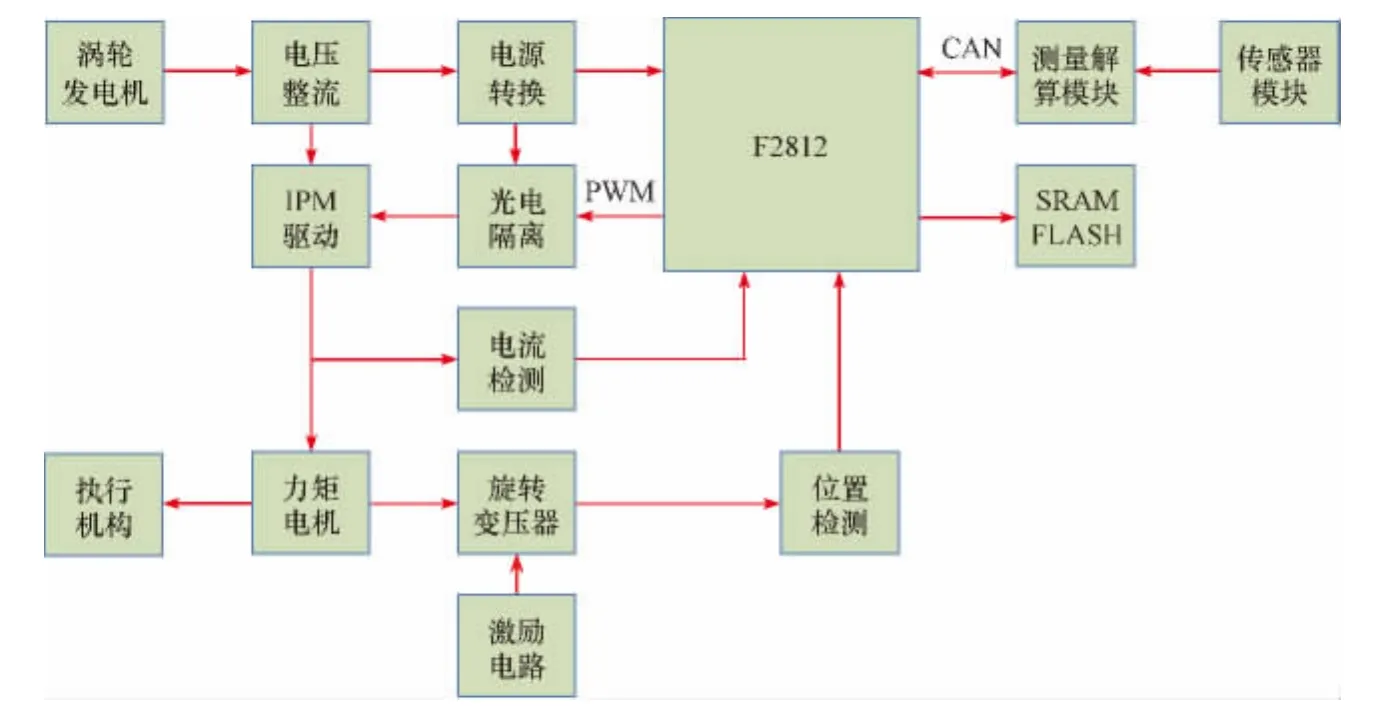
图1 伺服控制系统硬件结构Fig.1 Hardware configuration diagram of the servo control system
2.1 DSP处理器
TMS320F2812是TI公司为数字电机控制和运动控制优化设计的32位高性能定点DSP控制器,是整个电机控制系统的核心,运算速度为150 MIPS,其高速运算能力使一些复杂控制算法得以实现实时运算。F2812集成了适合高速电机控制的内部模块,大大简化了系统结构,为电机控制的实现提供了良好的平台。
F2812接收测量解算模块、电流检测模块、位置检测模块的信号,通过运算处理得到相应的PWM,通过功率驱动模块,实现对电机的控制。F2812有2个事件管理器:EVA和EVB,它们是电机控制中非常重要的外设。每个事件管理器包括通用定时器、比较器、PWM单元、捕获单元以及正交编码脉冲电路。控制系统采用一个比较单元和一个通用定时器产生输出脉冲。计数器根据所配置时钟计数,工作模式为连续增连续减模式。在计数过程中,比较器的值不断与计数器的值比较,当计数器的值与比较器的设定值匹配时,输出脉冲波,同时相应的比较中断标志被置位。F2812经过电流环PID运算后,通过修改比较器的值,产生不同占空比的PWM波。
2.2 电流检测模块
电流检测模块获取电机的三相电流以实现电流环控制。电流检测模块使用HNC015ANJ型霍尔电流传感器检测电机电流,电流测量范围-15~15A,输出电流范围0~25mA(DC),线性度≤±0.5%FSD,测量精度≤±1.0%FSD(25℃)。由于霍尔元件输出的是有正负方向的弱电流信号,因此应将该电流信号转换成电压信号,经过滤波处理,进入电压偏移电路。为防止电压过高或过低,加入了由二极管组成的限幅电路,将传感器采样信号转换为满足DSP输入要求的信号,由DSP的AD对调理电路输出的电压信号进行采样。
2.3 位置检测模块
位置检测模块获取电机转子的位置信息以实现位置环及速度环控制。控制系统使用AD2S80A芯片检测电机位置信息。AD2S80A芯片是一种专用的轴角转换器芯片,16位分辨率,最大跟踪速度975r/min,角度精度±2+1LSB弧分,工作频率设定10kHz,系统使用SNJ54LVTH573FK芯片将AD2S80A芯片输出的5.0V电平信号转换为满足DSP输入要求的3.3V电平信号。
2.4 功率驱动模块
功率驱动模块将DSP输出的PWM信号进行功率放大,驱动IPM模块,控制电机的通电顺序和通电时间,实现功率变换,驱动电机运转。控制系统采用PM75RLA120作为驱动电机的IPM智能功率模块,内含7个IGBT(insulated gate bipolar transistor),其中1个IGBT做制动用,其余6个IGBT构成3相逆变电路,直流母线电压<800V,驱动电压15V,载波频率<20kHz,工作结温-20~150℃,短路保护,过温保护,驱动电压欠压保护等。该模块用于三相电路时,只需利用光耦隔离电路和DSP处理器向模块提供控制电源及驱动信号,并且该模块采用软开关,具有低浪涌、低噪声等特征,符合EMC要求。
由于电机系统采用的是PWM方波控制输出,即为开关量控制,进入IPM大电流控制过程时产生的高频谐波分量较多,当工作电压逐步升高时,由高频谐波分量产生的空间辐射和电路耦合能量也在不断增强,从而在控制信号上衍生出高频噪声,影响系统的正常工作。在设计中将整个电路分成2部分:信号处理电路负责对DSP输出的控制信号进行隔离和调理;驱动电路对信号处理电路的输出进行二次隔离和驱动处理。6路PWM信号由DSP输出后,首先经过ADuM1100完成3.3V到5.0V的电平转换,同时进行一级隔离,接着通过三极管2N2222A进行二级隔离。由于采用了两级隔离处理,阻断了元器件耦合的电磁干扰,大大减小了电磁干扰的影响。针对电机PWM控制信号的特征,在信号调理电路中采用了电流环的设计,即无论该路有无控制信号通过,电路中始终有5mA电流存在,虽然增加了电路的功耗,但是电容可以降低电源对地的阻抗,进而有效地吸收空间辐射能量对信号的干扰。
3 伺服控制软件系统实现
3.1 伺服控制主程序流程
系统上电后,首先完成初始化工作,对系统参数、初始状态进行配置、检测,确认系统安全及检测完必要的启动状态参数后,进入主程序等待。中断服务子程序主要包括AD转换、电流环控制、速度环控制和位置环控制。CAN中断触发位置环控制,获取当前位置信息;定时器中断触发速度环控制,实现速度计算、速度调节等功能;定时器中断触发电流及位置的AD采样任务及电流环控制,实现电流的获取和调节,计算PWM占空比等任务,并触发PWM输出任务;PWM输出任务配置事件管理器的相关寄存器,控制PWM输出波形。主程序流程如图2所示。

图2 伺服控制主程序流程Fig.2 Flow chart of the main program
3.2 电流环设计
电流环控制是三环控制的基础。电流环的给定值为速度环的输出,电流环的反馈值为霍尔电流传感器的输出。电流环调节的目的是为了确定电机定子绕组导通所需要的PWM占空比。电流环的设计必须考虑到电流的快速响应,当给定电流发生变化时,控制系统必须迅速做出响应,使输出电流跟踪给定电流的变化。电流环调节时,遵循PID调节的规律,在保证电流稳态输出的前提下,尽量减小瞬态响应时间。经PID调节,电流环频率10kHz,阶跃输入的响应时间<1.2ms,稳态输出误差<±0.1A,基本满足控制要求。
3.3 速度环设计
速度环控制是三环控制的中间环节,在三环控制中起着承上启下的作用。速度环的给定值为位置环的输出,速度环的反馈值由旋转变压器位置信息解算得到。速度环调节是为了确定电流环的给定电流。速度环调节时,应具有精度高、响应快的特性,具体反映为速度脉动率小、频率响应快、调速范围宽等。经PID调节,速度环频率1kHz,阶跃输入的响应时间<20ms,调速范围0~300r/min。
3.4 位置环设计
位置环控制是三环控制的最外环,直接决定伺服控制系统的动、静态性能,也是控制器设计中最关键的部分之一。位置环的给定值为测量解算模块输出的位置信息,位置环的反馈值为旋转变压器的位置信息。位置环调节是为了确定速度环的给定速度。位置环调解时,应具有较快的跟踪响应速度、较高的位置控制精度,同时又具有较小的超调量和较好的静态性能。经PID调节,位置环频率100Hz,阶跃输入的响应时间<0.2s,稳态输出误差<0.5°。电流环、速度环和位置环的中断服务子程序流程如图3所示。
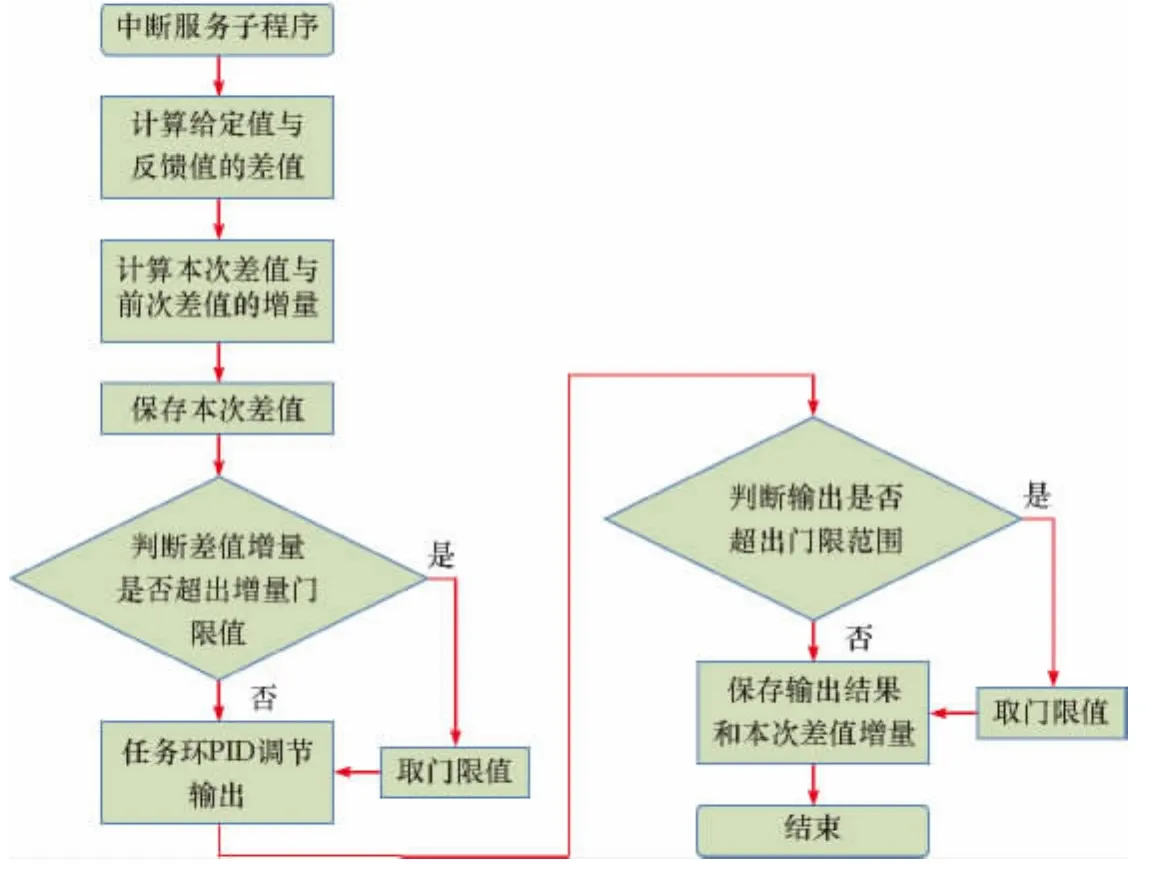
图3 中断服务子程序流程Fig.3 Flow chart of interrupting service subprogram
4 室内试验及现场应用
4.1 室内试验
三环闭环控制时,给定位置为模拟钻铤旋转的位置信息,模拟井下钻铤以120r/min速度旋转(见图4),测量解算模块利用捷联算法,计算出纠斜工具面,即电机输出轴所指向的执行机构推靠方向,经过伺服控制,使盘阀工具面稳定在该方向,控制精度误差小于0.5°。同时,随机对给定位置叠加阶跃跳变,电机迅速响应,体现在盘阀工具面的控制上会有少许的超调。经过PID调节后的盘阀工具面角见图5。
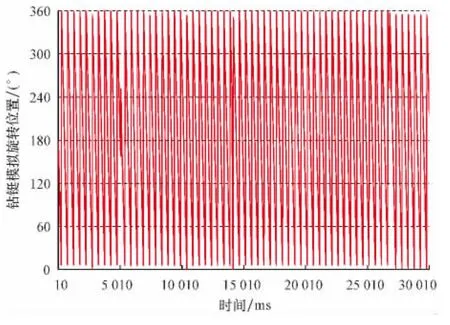
图4 钻铤旋转模拟Fig.4 Simulation of drill collar rotation
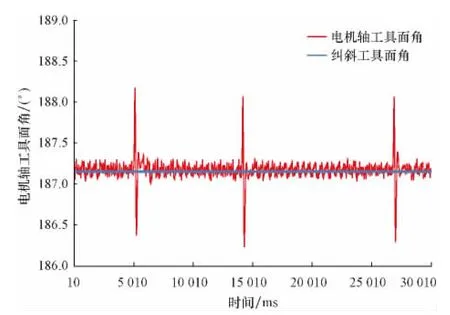
图5 电机轴工具面角Fig.5 Motor shaft tool face angle and restoring tool face angle
4.2 现场应用
安顺1井是中国石化在黔南坳陷部署的一口风险探井,设计垂深5 600.00m,钻遇地层易斜、研磨性强。应用捷联式自动垂直钻井工具之前,采用常规钻具组合钻进,井斜角持续增大,钻至井深2 436.00m时井斜角增至6.25°。常规钻具组合:φ311.1mm PDC钻头+浮阀+φ228.6mm 短钻铤(机械式测斜仪)+φ228.6mm钻铤(4根)+φ203.2mm无磁钻铤+φ203.2mm钻铤(8根)+φ177.8mm钻铤(6根)+φ127.0mm钻杆。
捷联式自动垂直钻井工具应用井段2 436.00~2 610.79m,纯钻时间172h,进尺174.79m,井斜角持续减小,钻至井深2 595.59m时井斜角降至0.24°,与使用垂直钻井工具前相比,井斜角由6.25°降至0.24°,完全达到纠斜目标。垂直钻井钻具组合:φ311.1mm牙轮钻头+φ228.6mm 捷联式自动垂直钻井工具+浮阀+φ228.6mm短钻 铤 (机 械 式 测 斜 仪 )+φ228.6mm 钻 铤 +φ306.00mm 稳 定 器 +φ228.6mm 钻铤(2根)+φ203.2mm 无磁钻铤+φ203.2mm 钻铤(8根)+φ177.8mm钻铤(6根)+φ127.0mm钻杆。钻井参数:钻压160~220kN,转速50~60r/min,排量44~46L/s,泵压18~21MPa。
电测井斜角曲线与工具内部井斜角曲线对比见图6。从图6可以看出:使用捷联式自动垂直钻井工具前,井斜角一直增大,钻至井深2 425.00m时井斜角增至5.20°;使用捷联式自动垂直钻井工具后,井斜角迅速减小,钻至井深2 600.00m时井斜角降至0.33°,完全达到纠斜目标。
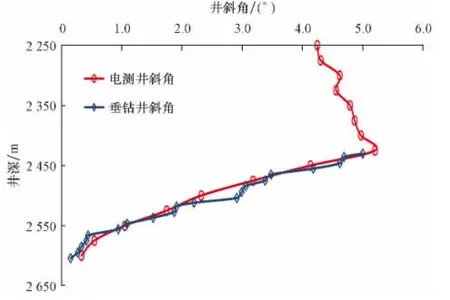
图6 井斜曲线Fig.6 Curve of well deviation angle
伺服控制的目标——电机轴工具面角,代表盘阀工具面的指向,即执行机构侧向推靠力的方向,其控制结果应与井斜方位角一致。从垂直钻井工具内部存储数据回放来看,电机轴工具面角与井斜方位角基本一致,偏差不超过2°(见图7)。

图7 方位角与电机轴工具面角曲线Fig.7 Curves of azimuth angle and the motor shaft tool face angle
由图7可知:使用捷联式自动垂直钻井工具前,方位角一直稳定在增斜方位,井深2 425.00m处的方位角为230.7°(电测数据);使用捷联式自动垂直钻井工具后,在井斜角下降的同时,方位角并没有稳定在原方位上,而是呈逆时针漂移,井深2 600.00m处的方位角为77.6°(电测数据),与原增斜方位基本相反。这说明捷联式自动垂直钻井工具实际降斜的轨迹不是理想的直线指向方位角的反方向,而是呈逆时针螺旋状的轨迹。其原因有2个:一是在小井斜角情况下方位角的测量精度降低;二是降斜执行机构翼肋推出的侧向推靠力并不是严格指向方位角方向,而是有一个延迟角度,导致实际降斜方向始终向右偏移,捷联式自动垂直钻井工具持续测量井斜角和方位角,调整电机轴工具面角和翼肋推出的方向,从而产生轨迹逆时针漂移的降斜效果,影响了捷联式自动垂直钻井工具自身实际降斜能力的充分体现。
5 结论与建议
1)捷联式自动垂直钻井工具伺服控制模块设计合理,能够快速响应,调节精确可靠,能实现实时控制,在直井钻进过程中能自动纠斜、防斜。
2)伺服控制是影响捷联式自动垂直钻井工具纠斜、防斜效果的主要因素之一,还有其他重要影响因素如数据测量解算精度、执行机构性能等,需要进一步研究解决存在的问题,使捷联式自动垂直钻井工具的性能完全体现出来。
[1]白家祉,苏义脑.井斜控制理论与实践[M].北京:石油工业出版社,1990:73-98.Bai Jiazhi,Su Yinao.Theory of borehole deviation control and proctive[M].Beijing:Petroleum Industry Press,1990:73-98.
[2]高宝奎,高德利.直井防斜原理综述[J].石油钻采工艺,1996,18(2):8-13,105.Gao Baokui,Gao Deli.Overview on controlling deviation in straight well[J].Oil Drilling & Production Technology,1996,18(2):8-13,105.
[3]孙岿.防斜打快技术现状与对策[J].天然气工业,2003,23(3):67-69.Sun Kui.Characterization and development of techniques for deviation control & fast drilling[J].Natural Gas Industry,2003,23(3):67-69.
[4]王斌,李洪乾,李强.缅甸D区块二开井段防斜钻具组合优选[J].石油钻探技术,2010,38(4):67-69.Wang Bin,Li Hongqian,Li Qiang.The study of BHA optimization for D Block in Myanmar[J].Petroleum Drilling Techniques,2010,38(4):67-69.
[5]高德利.易斜地层防斜打快钻井理论与技术探讨[J].石油钻探技术,2005,33(5):16-19.Gao Deli.Discussions on theories and techniques about rapid drilling while preventing deviating in formations tending to deflecting[J].Petroleum Drilling Techniques,2005,33(5):16-19.
[6]王兴武.塔里木超深井深部井斜控制技术[J].断块油气田,2011,18(1):100-102.Wang Xingwu.Hole deviation control technology for deep interval of ultra-deep wells in Tarim Basin[J].Fault-Block Oil &Gas Field,2011,18(1):100-102.
[7]苏义脑,李松林,葛云华,等.自动垂直钻井工具的设计及自动控制方法[J].石油学报,2001,22(4):87-91.Su Yinao,Li Songlin,Ge Yunhua,et al.The design and control ways of the downhole automatic closed loop of vertical drilling tool[J].Acta Petrolei Sinica,2001,22(4):87-91.
[8]韩来聚,倪红坚,赵金海,等.机械式自动垂直钻井工具的研制[J].石油学报,2008,29(5):766-768.Han Laiju,Ni Hongjian,Zhao Jinhai,et al.Development of mechanical tool for automatic vertical drilling[J].Acta Petrolei Sinica,2008,29(5):766-768.
[9]杨春旭,韩来聚,步玉环,等.现代垂直钻井技术的新进展及发展方向[J].石油钻探技术,2007,35(1):16-19.Yang Chunxu,Han Laiju,Bu Yuhuan,et al.New development and future direction of modern vertical drilling technology[J].Petroleum Drilling Techniques,2007,35(1):16-19.
[10]张绍槐.深井、超深井和复杂结构井垂直钻井技术[J].石油钻探技术,2005,33(5):11-15.Zhang Shaohuai.Vertical drilling technologies in deep,ultradeep,and complex structure wells[J].Petroleum Drilling Techniques,2005,33(5):11-15.
[11]薄和秋,赵永强.Verti Trak垂直钻井系统在川科1井中的应用[J].石油钻探技术,2008,36(2):18-21.Bo Heqiu,Zhao Yongqiang.Application of Verti Trak in Chuanke-1Well[J].Petroleum Drilling Techniques,2008,36(2):18-21.
[12]蒋祖军,肖国益,李群生.川西深井提高钻井速度配套技术[J].石油钻探技术,2010,38(4):30-34.Jiang Zujun,Xiao Guoyi,Li Qunsheng.Technology to increase deep well drilling speed in Western Sichuan[J].Petroleum Drilling Techniques,2010,38(4):30-34.
[13]Oppelt J,Chur C,Feld D,et al.New concepts for vertical drilling of boreholes[R].SPE 21905,1991.
[14]Chur C,Oppelt J.Vertical drilling technology:a milest one in directional drilling[R].SPE 25759,1993.
[15]Ligrone A,Oppelt J,Calderoni A,et al.The fastest way to the bottom:straighthole drilling device-drilling concept,design considerations and field experience[R].SPE 36826,1996.
[16]Reich M,Oesterberg M,Montes H,et al.Straight down to success:performance review of a vertical drilling system[R].SPE 84451,2003.
[17]刘以明,蔡文军,王平,等.Power V和机械式随钻测斜仪在黑池1井的应用[J].石油钻探技术,2006,34(1):71-73.Liu Yiming,Cai Wenjun,Wang Ping,et al.Application of Power V and mechanical inclinometer in Heichi 1Well[J].Petroleum Drilling Techniques,2006,34(1):71-73.
[18]丁红,陈杰,陈志学,等.垂直钻井技术在青探1井的应用[J].石油钻探技术,2007,35(3):30-32.Ding Hong,Chen Jie,Chen Zhixue,et al.The application of Power V technology in Well Qingtan 1[J].Petroleum Drilling Techniques,2007,35(3):30-32.
[19]王春生,魏善国,殷泽新.Power V垂直钻井技术在克拉2气田的应用[J].石油钻采工艺,2004,26(6):4-7.Wang Chunsheng,Wei Shanguo,Yin Zexin.Application of Power V technology in the development wells of Kela-2Gasfield[J].Oil Drilling & Production Technology,2004,26(6):4-7.
[20]陈涛,蒋西平,魏强,等.阿北1井垂直钻井工具应用分析[J].石油钻探技术,2012,40(5):123-126.Chen Tao,Jiang Xiping,Wei Qiang,et al.Analysis on application of vertical drilling tools in Well 1of Abei Oilfield[J].Petroleum Drilling Techniques,2012,40(5):123-126.
[21]孙峰,吕官云,马清明.捷联式自动垂直钻井系统[J].石油学报,2011,32(2):360-363.Sun Feng,LüGuanyun,Ma Qingming.A strap-down automatic vertical drilling system[J].Acta Petrolei Sinica,2011,32(2):360-363.
[22]王锡洲.捷联式自动垂直钻井系统的研制及现场试验[J].石油钻探技术,2010,38(3):13-16.Wang Xizhou.Development and field test of automated strapdown vertical drilling system[J].Petroleum Drilling Techniques,2010,38(3):13-16.
猜你喜欢
卷宗(2021年2期)2021-03-09 07:57:24
云南化工(2020年11期)2021-01-14 00:51:02
河北理科教学研究(2020年2期)2020-09-11 06:15:56
空间科学学报(2020年4期)2020-04-22 01:17:04
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
试题与研究·教学论坛(2016年16期)2016-07-02 08:38:22
火控雷达技术(2016年1期)2016-02-06 02:18:01
河南科技(2015年18期)2015-11-25 08:50:14
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
