
模糊Petri网在某型武器载车系统故障诊断中的应用
2014-07-03 06:08熊盛
兵器装备工程学报 2014年4期
熊 盛
(92155 部队,海南 三亚 572000)
现代作战中,机动能力是武器系统作战效能的重要影响因素,因此机动武器载车系统的可靠性和稳定性对作战的胜败有着重大影响。某型武器载车系统包含机械、电气设备和液压、气动装置。由于系统中设备种类多,结构复杂,工作时任何一个部位的故障都可能导致一系列后续故障的发生,表现为故障的并发性;另一方面,同一个故障也可能由多个原因造成,多个不同的原发性故障沿各自不同的传播途径可引发同一系统级故障,因此该系统的故障诊断过程存在不确定性和模糊性[1]。如果采用科学系统的方法描述故障的产生模式,维修人员则可在较短的时间内实现对故障的定位和排除,从而保证载车系统的可靠性和稳定性[2]。本文以某型武器载车系统底盘启动故障诊断为例,对模糊Petri 网在故障诊断中的应用方法进行了研究。
1 故障诊断模糊Petri 网模型
故障诊断就是利用已知信息去认识这个含有不可知信息系统的特性、状态与发展趋势,并对未来做出预测与决策。采用专家系统进行故障诊断是当前应用较为广泛的方法,在专家系统中,传统的知识表达方法包括逻辑表示法、语义网络表示法、产生式表示法、框架表示法等。这些方法虽然能表达故障特征的纵向和横向联系,但由于对故障仅仅是一种静态描述,不能表现故障的动态行为,且无法进行并行推理,现实系统中的模糊性也无从体现,使整个系统诊断效率受到约束[3]。Petri 网理论是关于分布式系统和分布式进程的理论,它具有较强的描述并发现象和故障传播过程的能力,因而是对动态系统进行建模和分析的重要工具[4]。但是现实操作中,用户对故障现象的描述经常存在不确定性或模糊性,例如底盘启动“困难”,振动“厉害”等,普通Petri 网建模方法还不能满足故障诊断的需求。基于此,将模糊产生式规则与Petri 网相结合,定义模糊Petri 网模型,利用其可分层的特点,将相对复杂的故障逐层细分,缩小范围,推理出故障原因及可信度[5]。
1.1 故障诊断模糊产生式规则
故障之间存在着模糊关系和传递关系,这些关系可以采用模糊产生式规则来描述[6],模糊产生式规则最简单的形式如下:
规则R1:

命题di表示一组前提或状态,命题dk表示若干个动作或结论,CF 为这条规则的置信度,CF 的值为μi,μi的取值范围在0 和1 之间。这种形式的模糊产生式规则表示一个故障原因导致了一个故障模式。模糊产生式规则的其他形式,如规则的“与”、“或”关系均可由此衍生得出,其表达式如下:
规则R2:

它表示故障多个故障d1,d2,…,dn同时出现导致故障dk的出现;
它表示故障多个故障d1,d2,…,dn中任何一个或几个的出现将导致故障dk的出现,此时的μi与di之间是一一对应的关系。
1.2 模糊Petri 网定义
模糊Petri 网由库所P 和变迁T 组成,它将模糊产生式规则中的命题看作库所,用圆圈“○”表示;将模糊产生式规则中的推理过程看作一种变迁,用竖线“|”表示;命题之间的因果关系用库所和变迁之间的有向弧表示。为了更好地解释模糊Petri 网(Fuzzy Petri Nets),这里将其定义为一个九元组[7]:FPN(P,T,D,I,O,f,α,β,λ);
其中:P={P1,P2,…,Pn}是一个有限的库所集;T={t1,t2,…,tn}是一个有限的变迁集;D ={d1,…,dn}是一个有限的命题集;且P∩T∩D=Φ,︱P︱=︱D︱。
I :T→P∞表示输入函数,它决定变迁的输入库所;
O:T→P∞表示输出函数,它决定变迁的输出库所;
f :T→[0,1],变迁的置信度集,它是变迁到一个0 ~1 间实数的映射,即μi=f(ti);
α:P→[0,1],库所的置信度集,它是库所到一个0 ~1间实数的映射,Pi的置信度为α(Pi);
β:P→D 为库所与命题间的映射,即di=β(Pi)。
λ:T→[0,1],为变迁的触发阈值集,当α(Pi)≥λ 时,变迁ti才会被触发。
根据上述定义,将1.1 中的模糊产生式规则用模糊Petri网的形式表达出来,如图1 所示,从图中可以看出,故障状态的传播过程被直观地展现出来。
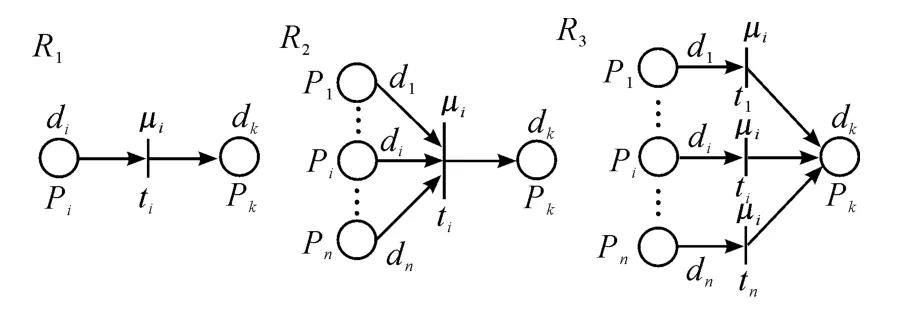
图1 模糊产生式规则的模糊Petri 网模型
2 模糊Petri 网故障诊断推理算法
故障诊断与故障传播之间是互逆关系,故障诊断是从观察到的故障现象查找故障的原因,而故障现象正是由故障的传播造成的。模糊Petri 网描述的是故障的传播模型,因此基于模糊Petri 网的故障诊断是一个带有置信度的反向推理过程,它从假设的目标故障现象出发,反向查找导致目标故障现象发生的所有路径及初始故障原因。为了便于推理过程的进行,一般需要定义以下5 种库所集合[7]:
1)初始库所集合SP:由所有初始库所组成的集合,一般用来表示故障的原因。
2)目标库所集合GP:由所有目标库所组成的集合,一般用来表示系统的故障状态。
3)能达性库所集合RS:从Pi经过一系列的变换可以建立起联系的库所的集合。
4)立即可达性库所集合IRS:从Pi经一次变换就能立即达到的库所的集合。
5)相邻库所集合AP:与Pi经同一变换能立即达到的库所的集合。
在故障诊断过程中首先要根据现场信息重新计算知识库里的规则置信度,并根据模糊Petri 网建立各库所的能达到性集合表,立即可达性库所集合表和相邻位置集合表。模糊Petri 网故障诊断反向推理具体步骤如下:首先选定一个故障现象Pi并将其作为目标库所,然后在IRP 表中查找能导出该故障现象的变迁,按照变迁置信度的大小依次选取这些变迁,若某个变迁ti的前提库所Pj与现场的事实相匹配,则执行该变迁;否则将该变迁的前提库所作为子目标,递归执行上一步的过程,直到诊断出故障原因[8]。若没有找到能导致该故障现象的规则,则推理失败。
3 载车系统故障诊断实例
在某型武器载车系统中,底盘启动故障的发生频率较高,因为底盘的正常启动要求底盘中的燃油系统、启动电路以及机械传动与控制三个部分都必须工作正常,任何一个部分的故障都将导致启动失败,因此底盘的启动故障具备并发性和传播性的特点。本文根据该型FKWQ 载车系统启动失败的典型原因和特征,建立底盘启动故障的故障诊断模糊Petri 网模型,并采用反向推理的方法对该故障进行诊断,从而查找出故障原因。
3.1 载车系统底盘启动故障分析与模型建立
首先根据底盘中电路系统、燃油系统和机械传动系统各自内部的结构原理和以往底盘启动故障诊断与维修经验建立故障诊断的知识库,该知识库中的规则采用本文1.1 节中介绍的模糊产生式规则来描述。
R01:IF(油管接头松动,油路进空气P1)THEN (燃油系统故障P20)CF=0.98
R02:IF(燃油管路堵塞P2)THEN (燃油系统故障P20)CF=0.86
R03:IF(燃油滤清器堵塞P3)THEN (燃油系统故障P20)CF=0.88
R04:IF(输油泵不供油或断续供油P4)THEN (燃油系统故障P20)CF=0.90
R05:IF(进油管漏气或接头滤网堵塞P5)THEN (燃油系统故障P20)CF=0.94
R06:IF(喷油器不出油或不雾化P6)THEN (燃油系统故障P20)CF=0.85
R07:IF(调速器操纵手柄位置不对P7)THEN (燃油系统故障P20)CF=0.92
R08:IF(蓄电池电力不足P8)THEN (启动电路故障P21)CF=0.98
R09:IF(启动开关接触不良P9)THEN (启动电路故障P21)CF=0.93
R10:IF(启动继电器故障P10)THEN (启动电路故障P21)CF=0.90
R11:IF(启动电机故障P11)THEN (启动电路故障P21)CF=0.86
R12:IF(熄火开关闭合P12)THEN (启动电路故障P21)CF=0.85
R13:IF(易熔线烧断P13)THEN (启动电路故障P21)CF=0.98
R14:IF(启动机与飞轮啮合故障P14)THEN (机械故障P22)CF=0.96
R15:IF(喷油提前角控制错误P15)THEN (机械故障P22)CF=0.93
R16:IF(配气相位控制错误P16)THEN (机械故障P22)CF=0.92
R17:IF(活塞环或缸套过度磨损P17)THEN (机械故障P22)CF=0.90
R18:IF(气门漏气P18)THEN (机械故障P22)CF=0.92
R19:IF(燃烧室容积过大P19)THEN (机械故障P22)CF=0.86
R20:IF(燃油系统故障P20)THEN (底盘启动故障P23)CF=0.98
R21:IF(启动电路故障P21)THEN (底盘启动故障P23)CF=0.95
R22:IF(机械故障P22)THEN (底盘启动故障P23)CF =0.91
根据以上模糊产生式规则建立相应的故障诊断模糊Petri 网如图2 所示。
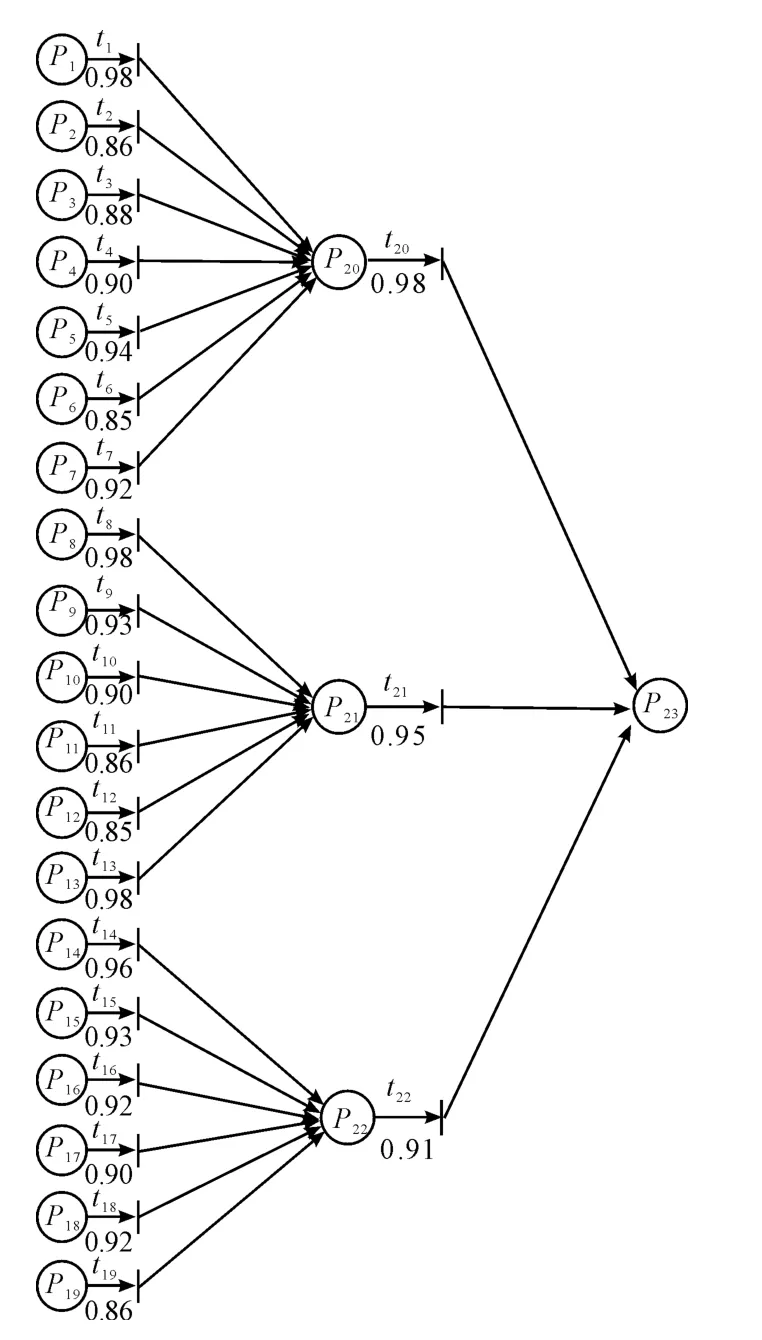
图2 底盘启动故障诊断模糊Petri 网模型
3.2 基于模糊Petri 网的载车系统底盘启动故障诊断
由图2 可知,底盘启动故障诊断模糊Petri 网模型中的起始库所PS= {P1,P2,P3,P4,P5,P6,P7,P8,P9,P10,P11,P12,P13,P14,P15,P16,P17,P18,P19},目标库所PG={P23},能达性库所集合、立即可达性库所集合和相邻库所集合如表1所示。
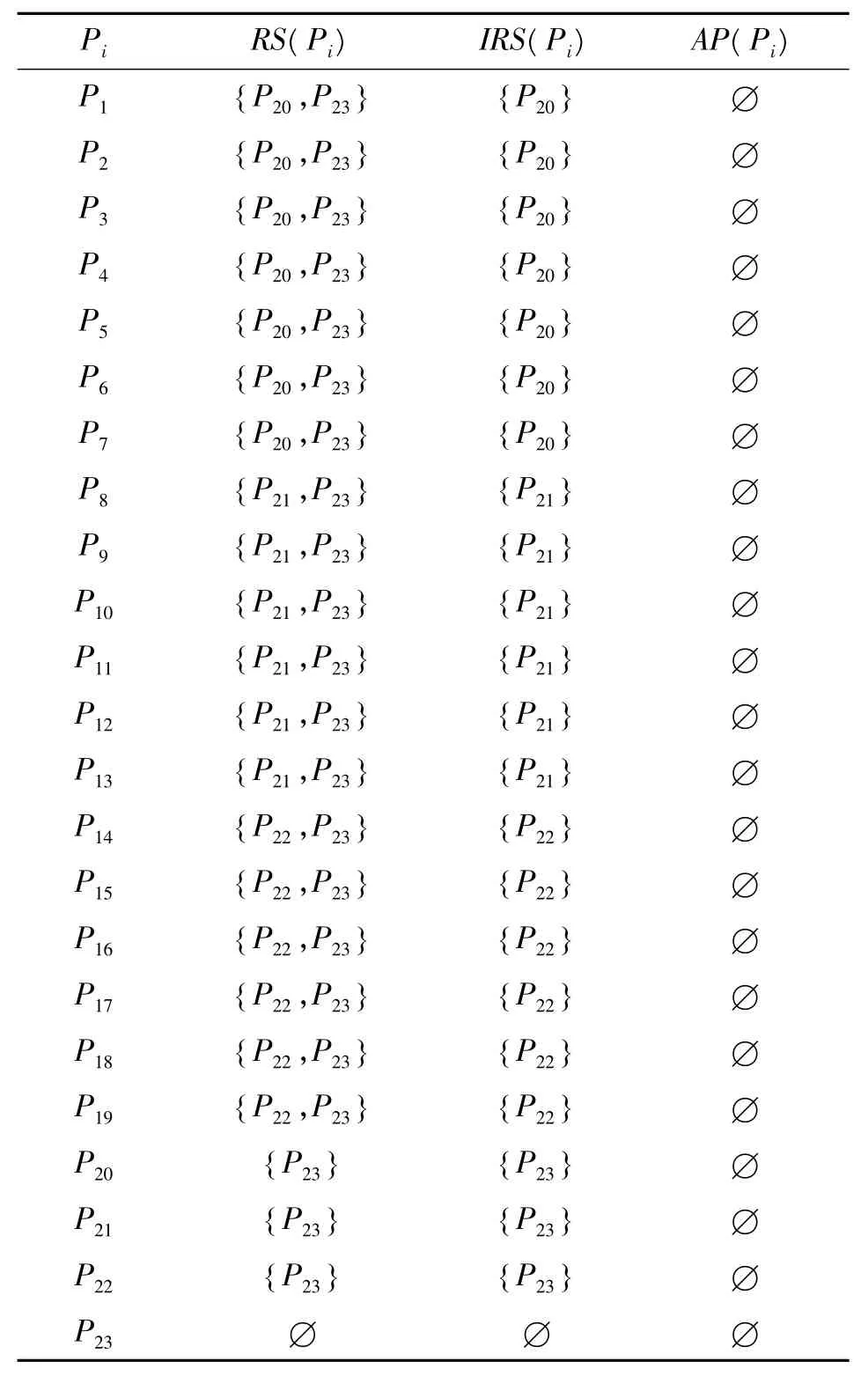
表1 能达性集合、立即可达性集合、相邻库所集合
在故障诊断中,设置所有变迁的触发阈值λ =0.75,故障诊断的过程如下:
1)首先根据Petri 网模型中的库所数量和变迁数量初始化两个标志数组FLAG_P[22]和FLAG_T[22],数组中各元素的值可以为0 或者1,用来标记当前库所和变迁是否已经被查询过,从而避免推理过程中重复查询。当前数组中元素的值均为0,表示尚未被查询。
2)底盘启动故障P23在表1 中的相邻库所为?,表明没有其他故障同时发生。再查表1 可知,P23的发生是由P20、P21或P22引起的,且P20对应的变迁t20的置信度最大(CF =0.98),因此选择路径P20→P23,然后将标志数组元素FLAG_P[20]和FLAG_T[20]置1;
3)由于P20不是初始库所,所以继续反向查找能引发P20的路径。从表1 中查出能够到达P20的路径共有7 条,其中库所P1对应的变迁t1的置信度最大(CF=0.98),因此选择路径P1→P20继续反推,并将标志数组元素FLAG_P[1]和FLAG_T[1]置1。由于P1是初始库所,因此向用户询问“油管接头松动,油路进空气?”。用户检查所有油管接头后,发现确实有接头松动,则向系统回答“是”。系统根据统计信息计算出库所P1的置信度α(P1)=0.95,由于α(P1)大于预先设定的阈值λ=0.75,所以变迁t1 可以被触发。相应的,库所P20的置信度也可计算出来:α(P20)= α(P1)×0.98 =0.960 4,也大于阈值λ。由此可以判断“底盘启动故障”的原因是“油管接头松动,油路进空气”。至此,推理结束,故障诊断成功。
4)如果向用户询问“油管接头松动,油路进空气?”。用户检查所有油管接头后,发现接头没有松动,向系统回答“未发现”。系统计算出库所P1的置信度α(P1)=0. 3,由于α(P1)小于预先设定的阈值λ,所以变迁t1 不能被触发。但是引发P20的路径还有6 条,接下来系统将按照这6 条路径所对应的变迁的置信度大小次序,重复进行前面的查询过程,这里不再赘述。
5)若遍历完能引发P20的7 条路径,仍未找到故障原因,则按照步骤3、4 中的方法,查询所有能够到达P21或P22的路径,直到找出故障原因为止。如果遍历完全部路径后还未找到故障原因,则说明故障原因不在知识库中,需要另外查找故障原因。
4 结束语
在对某型武器载车系统底盘启动故障进行诊断时,采用模糊Petri 网建立的模型使系统知识逻辑关系清晰,推理过程简单,且具有图形直观性。通过诊断实例,充分体现了模糊Petri 网描述系统动态特性、并行特性的能力,而且推理过程便于在计算机上通过编程实现。由此证明基于模糊Petri网的故障诊断是一种行之有效的方法。
[1]吴哲辉.Petri 网导论[M].北京:机械工业出版社,2006.
[2]丁军,张志华,周学智.模糊Petri 网在指火控系统故障诊断中的应用[J]. 情报指挥控制系统与仿真技术,2005,27(3):48-52.
[3]袁崇义.Petri 网原理与应用[M].南京:电子工业出版社,2005.
[4]王俊国,闵松,赵金,等.基于模糊Petri 网的故障诊断方法[J].兵工自动化,2002,21(6),18-21.
[5]李万,王学军,黄善文.模糊Petri 网在某型舰炮系统故障诊断中的应用[J].船海工程,2010,39(5):219-221.
[6]杨其宇,张霞.模糊Petri 网故障诊断技术应用[J].兵工自动化,2006,25(4):73-74.
[7]戎梅,赵廷弟,郭江杰.模糊Petri 网在航天发射系统故障诊断中的应用研究[J]. 航天控制,2009,27(4):82-87.
[8]黄玉燕,詹素华.故障诊断的模糊Petri 网模型[J].集美大学学报:自然科学版,2002,7(3):237-241.
猜你喜欢
电子技术与软件工程(2022年15期)2022-11-11
小型微型计算机系统(2022年4期)2022-05-09
核科学与工程(2021年4期)2022-01-12
航空发动机(2020年6期)2021-01-12
航天制造技术(2020年6期)2021-01-05
华侨大学学报(自然科学版)(2020年1期)2020-02-27
计算机应用(2018年5期)2018-07-25
计算机系统应用(2018年2期)2018-03-02
山东工业技术(2016年15期)2016-12-01
专用汽车(2016年4期)2016-03-01
